交通用系统及交通用基础设施的制作方法
1.本发明涉及交通用系统及交通用基础设施。
背景技术:
2.专利文献1公开了驾驶辅助装置,其通过将光图像向路面投影,从而能够实现驾驶员的适当的驾驶。
3.专利文献1:日本特开2017-144995号公报
技术实现要素:
4.另外,例如在希望对由路灯照明的区域进行路面描绘的情况下,如果该区域明亮,则有时难以适当地进行路面描绘。对于这一点,认为在现有的交通用系统存在改善的余地。
5.本发明的目的在于,提供适于路面描绘的交通用系统。
6.另外,在希望进行路面描绘的情况下,例如在路面描绘装置的位置远离希望进行路面描绘的位置的情况下,有时难以适当地进行路面描绘。对于这一点,认为在现有的交通用系统存在改善的余地。
7.本发明的目的在于,提供适于路面描绘的交通用基础设施。
8.另外,以往汽车、摩托车、自行车、行人等交通参加者基于信号等进行右转、左转等的判断。但是,例如有时不易知晓在十字路口的由于逆向车辆而成为死角的区域是否存在其他车辆。另一方面,认为在针对存在于十字路口的车辆、该车辆的驾驶员等的交流存在改善的余地。
9.本发明的目的在于,提供能够使交通参加者的便利性提高的交通用系统。
10.用于达到上述目的的一个方式所涉及的交通用系统,
11.具有:路灯;以及
12.指令部,其在接收到希望进行路面描绘的信号时,使由所述路灯照明的区域的至少一部分变暗。
13.根据上述结构所涉及的交通用系统,例如即使路面照明得明亮,也由于使由路灯照明的区域的至少一部分变暗,而将路面描绘明确地显示。
14.如上所述,根据上述结构,能够提供适于路面描绘的交通用系统。
15.另外,在用于达到上述目的的一个方式所涉及的交通用系统中,
16.包含有照射区域彼此不同的多个所述路灯,
17.所述指令部接收希望进行所述路面描绘的信号和表示希望进行路面描绘的位置的信号,使由能够对与希望进行所述路面描绘的位置相对应的照射区域进行照射的所述路灯照明的区域的至少一部分变暗。
18.根据上述结构所涉及的交通用系统,指令部使由多个路灯之中的能够对与希望进行路面描绘的位置相对应的照射区域进行照射的路灯照明的区域的至少一部分变暗。因此,根据上述结构所涉及的交通用系统,能够将希望进行路面描绘的位置可靠地变暗。
19.另外,用于达到上述目的的一个方式所涉及的交通用系统,可以具有在地面设置的路面描绘装置。
20.根据上述结构所涉及的交通用系统,交通系统具有在地面设置的路面描绘装置。该路面描绘装置不移动,因此与由移动的车辆进行路面描绘的情况相比,该路面描绘装置进行路面描绘能够更可靠地进行路面描绘。
21.另外,用于达到上述目的的一个方式所涉及的交通用基础设施,
22.具有:
23.请求取得部,其能够取得希望进行路面描绘的信号和指定区域信息,该指定区域信息包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息的至少一者;
24.状况掌握部,其能够确定能够进行路面描绘的路面描绘装置和所述路面描绘装置能够描绘的区域;以及
25.指令部,其基于由所述请求取得部取得的所述指定区域信息和由所述状况掌握部确定出的所述路面描绘装置能够描绘的区域,使所述路面描绘装置之中的最适合的路面描绘装置进行路面描绘。
26.根据上述结构所涉及的交通用基础设施,交通用基础设施所具有的指令部基于指定区域信息和由状况掌握部确定出的路面描绘装置能够描绘的区域,使由状况掌握部确定出的路面描绘装置之中的最适于路面描绘的路面描绘装置进行路面描绘。
27.如上所述,根据上述结构,能够提供适于路面描绘的交通用基础设施。
28.另外,在用于达到上述目的的一个方式所涉及的交通用基础设施中,
29.所述指定区域信息可以包含与希望看见路面描绘的所述对象相关的信息。
30.根据上述结构所涉及的交通用基础设施,指定区域信息能够包含与希望看见路面描绘的对象相关的信息。因此,例如在通过路面描绘而显示的信息为文字信息时,路面描绘装置能够将文字信息进行路面描绘,以使得希望看见路面描绘的对象容易识别路面描绘。
31.另外,在用于达到上述目的的一个方式所涉及的交通用基础设施中,
32.所述交通用基础设施还具有拍摄部,该拍摄部构成为生成所述指定区域信息,
33.所述拍摄部将生成的所述指定区域信息发送至所述请求取得部。
34.根据上述结构所涉及的交通用基础设施,指定区域信息由拍摄部生成,发送至请求取得部。因此,例如,交通用基础设施即使不与车辆进行通信,也能够实现最适合的路面描绘。
35.另外,用于达到上述目的的一个方式所涉及的交通用系统,
36.具有:
37.检测部,其能够对第一车辆、第二车辆及第三车辆进行检测,该第二车辆是所述第一车辆的逆向车辆,该第三车辆在从所述第一车辆观察时从所述第二车辆的后方向所述第一车辆接近而处于可能成为死角的区域;以及
38.通知部,其能够通知与所述第一车辆穿过所述第二车辆的前方而转弯这一情况适当与否相关的信息,
39.所述通知部基于根据所述检测部的输出而判定为所述第三车辆正试图接近所述第一车辆的信息,对所述第一车辆通知所述信息。
40.根据上述结构所涉及的交通用系统,能够使用与穿过第二车辆的前方而转弯这一情况适当与否相关的信息,由第一车辆或者第一车辆的驾驶员判断可否右转或者左转。因此,即使无法直接视觉识别存在于死角的第三车辆,第一车辆或者第一车辆的驾驶员参考与穿过第二车辆的前方而转弯这一情况适当与否相关的信息,也能够判断可否右转或者左转。
41.如上所述,根据上述结构,能够提供能够使交通参加者的便利性提高的交通用系统。
42.另外,在用于达到上述目的的一个方式所涉及的交通用系统中,
43.基于来自所述第一车辆的请求信号,所述检测部能够对所述第三车辆进行检测。
44.根据上述结构所涉及的交通用系统,检测部基于来自第一车辆的请求信号,能够对第三车辆进行检测。因此,在第一车辆试图右转的定时,检测部进行动作,因此能够使检测部高效地动作。
45.另外,在用于达到上述目的的一个方式所涉及的交通用系统中,
46.所述检测部可以设置于所述第二车辆。
47.根据上述结构所涉及的交通用系统,检测部设置于第二车辆。成为第一车辆的死角的区域对于第二车辆而言不成为死角。因此,即使第三车辆存在于成为第一车辆的死角的区域,检测部也能够对第三车辆进行检测。并且,第二车辆与第一车辆相比较,位于第三车辆的附近,因此能够更可靠地对第三车辆进行检测。另外,检测部能够在第一车辆试图右转的定时开始动作,因此能够使检测部高效地动作。
48.另外,在用于达到上述目的的一个方式所涉及的交通用系统中,
49.可以是所述交通用系统包含交通用基础设施,
50.所述检测部设置于所述交通用基础设施。
51.根据上述结构所涉及的交通用系统,检测部设置于交通用基础设施。因此,例如,在第二车辆不具有检测部的情况下,第一车辆或者第一车辆的驾驶员参考与穿过第二车辆的前方而转弯这一情况适当与否相关的信息,也能够判断可否右转或者左转。
52.另外,在用于达到上述目的的一个方式所涉及的交通用系统中,
53.所述通知部能够包含路面描绘装置。
54.根据上述结构所涉及的交通用系统,通知部包含有路面描绘装置。因此,例如在第一车辆为手动驾驶车辆时,与穿过第二车辆的前方而转弯这一情况适当与否相关的信息通过路面描绘而能够视觉地传递至第一车辆的驾驶员。
55.发明的效果
56.根据本发明,能够提供适于路面描绘的交通用系统及交通用基础设施。
57.另外,根据本发明,也能够提供能够使交通参加者的便利性提高的交通用系统。
附图说明
58.图1a是在本发明的实施方式所涉及的交通用系统中使用的车辆的俯视图。
59.图1b是在图1a中例示的车辆的左侧视图。
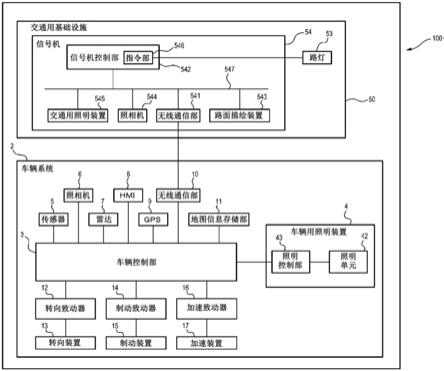
60.图2是本发明的一个实施方式所涉及的交通用系统的框图。
61.图3是例示本发明的一个实施方式所涉及的路灯的图。
62.图4是例示本发明的一个实施方式所涉及的路面描绘装置的图。
63.图5是例示车辆在十字路口处试图左转时的状态的图。
64.图6是本发明的一个实施方式所涉及的交通用系统的框图。
65.图7是例示本发明的一个实施方式所涉及的路灯的图。
66.图8是例示本发明的一个实施方式所涉及的信号机的图。
67.图9是例示车辆在十字路口处试图左转时的状态的图。
68.图10是例示车辆在十字路口处试图左转时的状态的图。
69.图11是本发明的一个实施方式所涉及的交通用系统的框图。
70.图12是例示主线道路和支线道路合流的道路的情形的图。
71.图13是本发明的一个实施方式所涉及的交通用系统的框图。
72.图14是例示本发明的一个实施方式所涉及的信号机的图。
73.图15是例示本发明的一个实施方式所涉及的交通用系统所执行的处理流程的图。
74.图16是例示本发明的一个实施方式所涉及的车辆在十字路口处试图右转时的状态的图。
75.图17是例示本发明的一个实施方式所涉及的车辆在十字路口处试图右转时的状态的图。
具体实施方式
76.下面,一边参照附图,一边对本发明的实施方式(下面,称为本实施方式)进行说明。此外,在本实施方式的说明中,对于具有与已经说明的部件相同的参照标号的部件,为了便于说明,省略其说明。另外,对于本附图所示的各部件的尺寸,为了便于说明,有时与实际的各部件的尺寸不同。
77.另外,在本实施方式的说明中,为了便于说明,适当提及“左右方向”、“前后方向”、“上下方向”。这些方向是关于在图1中例示的车辆1、或者在图3中例示的路灯53、在图4中例示的信号机54、在图7中例示的路灯153、在图8中例示的信号机1500、或者在图14中例示的信号机250而设定的相对的方向。在这里,“上下方向”是包含“上方向”及“下方向”的方向。“前后方向”是包含“前方向”及“后方向”的方向。“左右方向”是包含“左方向”及“右方向”的方向。此外,在本说明书中的“车辆”这一用语,可以包含汽车等四轮车、摩托车等两轮车等各种车辆。
78.(第一实施方式)
79.对在本实施方式所涉及的交通用系统100(参照图2)中使用的车辆1进行以下说明。图1a例示出车辆1的俯视图,图1b例示出车辆1的左侧视图。车辆1是能够通过自动驾驶模式行驶的车辆,且具有车辆用照明装置4(下面,简称为“照明装置4”)。照明装置4具有照明单元42和照明控制部43(参照图2)。照明单元42构成为配置于车辆1的车体顶部1a上,朝向车辆1的外部照射光图案。
80.照明单元42例如是具有激光源和使从激光源射出的激光偏转的光偏转装置的激光扫描装置。光偏转装置例如是mems(micro electro mechanical systems)反射镜、电控反射镜等可动反射镜。照明单元42通过将激光进行扫描而将光图案(例如,环状的光图案、线状的光图案)朝向行人等对象物进行照射。特别地,照明单元42将激光进行扫描,由此将
光图案描绘在对象物周围的路面上。
81.此外,在本实施方式中,单一的照明单元42配置于车体顶部1a上,但照明单元42只要能够朝向在以车辆1为基准的任意的方向存在的对象物照射光图案即可,照明单元42的数量、配置、形状等并不特别受到限定。例如,可以是4个照明单元42之中的2个照明单元42各自配置于左侧前大灯20l和右侧前大灯20r内,并且剩余的2个照明单元42各自配置于左侧后组合灯30l和右侧后组合灯30r内。并且,照明单元42可以配置为将车辆1的侧面1b包围。
82.接下来,参照图2对交通用系统100进行说明。图2例示出交通用系统100的框图。如图2中例示那样,交通用系统100具有交通用基础设施50和在车辆1设置的车辆系统2。车辆系统2具有车辆控制部3、照明装置4、传感器5、照相机6、雷达7、hmi(human machine interface)8、gps(global positioning system)9、无线通信部10(第1无线通信部)和地图信息存储部11。并且,车辆系统2具有转向致动器12、转向装置13、制动致动器14、制动装置15、加速致动器16和加速装置17。
83.车辆控制部3构成为对车辆1的行驶、照明装置4的动作进行控制。车辆控制部3由电子控制单元(ecu)构成。电子控制单元由cpu(central processing unit)等处理器、存储有各种车辆控制程序的rom(read only memory)和暂时地存储各种车辆控制数据的ram(random access memory)构成。处理器构成为将从在rom中存储的各种车辆控制程序指定出的程序在ram上展开,通过与ram的协同动作而执行各种处理。
84.车辆控制部3例如在其他车辆有可能进入车辆1的行进路线的情况下,基于车辆1的速度、位置信息等和其他车辆的速度、位置信息等,车辆1能够判断是否应该停止。例如,在车辆1经过某十字路口的推定时刻与其他车辆的推定时刻相比充分慢,或者充分快时,车辆控制部3判断为车辆1不停止而应该行进。另一方面,在车辆1经过某十字路口的推定时刻与其他车辆的推定时刻大致相同时,车辆控制部3判断为车辆1应该停止。
85.照明装置4(路面描绘装置的一个例子)构成为朝向车辆1的外部(特别是行人、其他车辆等对象物)照射激光(环状、线状的光图案),具有照明单元42和照明控制部43。照明控制部43构成为由电子控制单元(ecu)构成,基于对象物的位置信息对照明单元42进行控制以使得朝向对象物照射激光。此外,照明控制部43和车辆控制部3也可以由同一电子控制单元构成。
86.传感器5具有加速度传感器、速度传感器及陀螺仪传感器等。传感器5构成为对车辆1的行驶状态进行检测,将行驶状态信息输出至车辆控制部3。传感器5可以还具有对驾驶员是否就坐于驾驶席进行检测的就座传感器、对驾驶员的面部的方向进行检测的面部朝向传感器、对外部天气状态进行检测的外部天气传感器及对在车内是否有人进行检测的人体感应传感器等。
87.照相机6例如是包含ccd(charge-coupled device)、cmos(互补型mos)等拍摄元件的照相机。雷达7是毫米波雷达、微波雷达或激光雷达等。照相机6和/或雷达7构成为对车辆1的周边环境(其他车辆、行人、道路形状、交通标识、障碍物等)进行检测,将周边环境信息输出至车辆控制部3。车辆控制部3能够从接收到的周边环境信息而掌握行人、其他车辆等。另外,车辆控制部3也能够根据接收到的周边环境信息,判断是否需要朝向行人、其他车辆等对象物,将规定的信息(例如,表示车辆试图进入行人试图横穿的人行横道的信息、对
行人、自行车或者汽车等车辆提示停止、减速的信息等)进行路面描绘。
88.hmi 8由接受来自驾驶员的输入操作的输入部、以及将行驶信息等朝向驾驶员输出的输出部构成。输入部包含方向盘、加速踏板、制动踏板、对车辆1的驾驶模式进行切换的驾驶模式切换开关等。输出部是对各种行驶信息进行显示的显示器。
89.gps 9构成为取得车辆1的当前位置信息,将该取得的当前位置信息输出至车辆控制部3。无线通信部10构成为从其他车辆接受与处于车辆1的周围的其他车辆相关的信息(例如,行驶信息等),并且将与车辆1相关的信息(例如,行驶信息等)发送至其他车辆(车车间通信)。另外,无线通信部10构成为从信号机、标志灯等基础设施设备接收基础设施信息,并且将车辆1的行驶信息发送至基础设施设备(路车间通信)。车辆1可以与其他车辆、基础设施设备直接通信,也可以经由无线通信网络进行通信。地图信息存储部11是存储有地图信息的硬盘驱动器等外部存储装置,且构成为将地图信息输出至车辆控制部3。
90.在车辆1通过自动驾驶模式行驶的情况下,车辆控制部3基于行驶状态信息、周边环境信息、当前位置信息、地图信息等,自动地生成转向控制信号、加速控制信号及制动控制信号之中的至少一个。转向致动器12构成为从车辆控制部3接收转向控制信号,基于接收到的转向控制信号对转向装置13进行控制。制动致动器14构成为从车辆控制部3接收制动控制信号,基于接收到的制动控制信号对制动装置15进行控制。加速致动器16构成为从车辆控制部3接收加速控制信号,基于接收到的加速控制信号对加速装置17进行控制。如上所述,在自动驾驶模式中,车辆1的行驶由车辆系统2自动控制。
91.另一方面,在车辆1通过手动驾驶模式行驶的情况下,车辆控制部3按照驾驶员针对加速踏板、制动踏板及方向盘的手动操作,生成转向控制信号、加速控制信号及制动控制信号。如上所述,在手动驾驶模式中,转向控制信号、加速控制信号及制动控制信号是通过驾驶员的手动操作而生成的,因此,车辆1的行驶由驾驶员控制。
92.接下来,对车辆1的驾驶模式进行说明。驾驶模式由自动驾驶模式和手动驾驶模式构成。自动驾驶模式由完全自动驾驶模式、高级驾驶辅助模式和驾驶辅助模式构成。在完全自动驾驶模式中,车辆系统2自动地进行转向控制、制动控制及加速控制的全部行驶控制,并且驾驶员不处于能够驾驶车辆1的状态。在高级驾驶辅助模式中,车辆系统2自动地进行转向控制、制动控制及加速控制的全部行驶控制,并且驾驶员虽然处于能够驾驶车辆1的状态,但不驾驶车辆1。在驾驶辅助模式中,车辆系统2自动地进行转向控制、制动控制及加速控制之中的一部分行驶控制,并且在车辆系统2的驾驶辅助下驾驶员驾驶车辆1。另一方面,在手动驾驶模式中,车辆系统2不会自动地进行行驶控制,并且没有车辆系统2的驾驶辅助而由驾驶员驾驶车辆1。
93.另外,车辆1的驾驶模式也可以通过对驾驶模式切换开关进行操作而进行切换。在该情况下,车辆控制部3与驾驶员针对驾驶模式切换开关的操作相应地,将车辆1的驾驶模式在4个驾驶模式(完全自动驾驶模式、高级驾驶辅助模式、驾驶辅助模式、手动驾驶模式)之前进行切换。另外,车辆1的驾驶模式可以基于与自动驾驶车辆能够行驶即能够行驶区间、自动驾驶车辆的行驶被禁止的行驶禁止区间有关的信息或者与外部天气状态有关的信息而自动地切换。在该情况下,车辆控制部3基于这些信息对车辆1的驾驶模式进行切换。并且,车辆1的驾驶模式可以使用就座传感器、面部朝向传感器等而自动地进行切换。在该情况下,车辆控制部3基于来自就座传感器、面部朝向传感器的输出信号,对车辆1的驾驶模式
进行切换。
94.接下来,对交通用基础设施50进行说明。交通用基础设施50例如能够包含信号机、电线杆、路灯、铁塔等多个各种基础设施。如图2中例示那样,本实施方式所涉及的交通用基础设施50具有路灯53和信号机54。
95.路灯53设置于车道、人行道等的附近的地面。路灯53如图3中例示那样,具有用于向附近的路面照射光的照明部531、能够将从照明部531射出的光进行遮蔽的遮蔽部532、能够对路灯53的周围进行拍摄的照相机533、以及能够对路灯53进行控制的路灯控制部534。
96.照明部531例如是led灯等。照明部531能够朝向处于路灯53的设置位置附近的路面射出光。此外,照明部531可以包含与车辆用照明装置4的照明单元42相同结构的激光扫描装置。
97.遮蔽部532例如为可动式的遮蔽板等。遮蔽部532配置于照明部531的附近。遮蔽部532构成为在左右方向可动。遮蔽部532在位于从照明部531射出的光的出射方向时,遮蔽部532能够将从照明部531射出的光的全部或者一部分遮断。
98.照相机533是与照相机6相同的结构,因此省略说明。照相机533构成为对路灯53的周边环境(车辆、行人、道路形状、交通标识、障碍物、路面的明亮度等)进行检测,将周边环境信息输出至路灯控制部534。
99.路灯控制部534可以由与车辆控制部3相同的电子控制单元构成。路灯控制部534例如基于从照相机533接收到的周边环境信息,能够对照明部531及遮蔽部532进行控制。另外,路灯控制部534根据接收到的周边环境信息,也能够判断是否需要朝向行人、车辆等对象物,将规定的信息进行路面描绘。
100.接下来,参照图2和图4,对交通用基础设施50的信号机54进行说明。信号机54设置于车道、人行道等的附近的地面。信号机54具有无线通信部541(第2无线通信部)、信号机控制部542、路面描绘装置543、照相机544和交通用照明装置545。它们通过总线547彼此能够通信地连接。
101.无线通信部541构成为与车辆系统2的无线通信部10进行无线通信。无线通信部541例如可以通过点对点模式与无线通信部10进行直接通信,也可以经由网络与无线通信部10进行通信。另外,信号机54也能够经由无线通信部541,与具有无线通信装置的其他信号机进行通信。
102.信号机控制部542可以由与车辆控制部3相同的电子控制单元构成。信号机控制部542包含指令部546。信号机控制部542构成为对信号机54的各种动作进行控制。信号机控制部542例如基于对象区域的位置信息,对路面描绘装置543进行控制以使得朝向对象区域照射激光。信号机控制部542也能够根据接收到的周边环境信息,判断是否需要朝向行人、车辆等对象物,将规定的信息进行路面描绘。
103.指令部546构成为对路灯53的动作进行控制。指令部546可以由与车辆控制部3相同的电子控制单元构成。指令部546例如基于经由无线通信部541从车辆系统2发送出的希望进行路面描绘的信号及表示希望进行路面描绘的位置的信号的至少一个,生成用于对由路灯53射出的光的亮度、路灯53所具有的遮蔽部532的动作进行控制的控制信号。指令部546将该控制信号发送至路灯53。另外,指令部546基于表示希望进行路面描绘的位置的信号,能够对希望进行路面描绘的位置进行确定。并且,指令部546也能够确定能够对与该确
定出的希望进行路面描绘的位置相对应的照射区域进行照射的路灯53。另外,指令部546也能够对路面描绘装置543、或者其他信号机所具有的路面描绘装置进行控制。
104.在地面设置的信号机54的路面描绘装置543构成为朝向交通用基础设施50的外部(例如,交通用基础设施50附近的路面等对象区域)照射激光(环状、线状的光图案)。此外,路面描绘装置543可以包含与车辆用照明装置4的照明单元42相同结构的激光扫描装置。
105.照相机544是与照相机6相同的结构,因此省略说明。照相机544构成为对信号机54的周边环境(车辆、行人、道路形状、交通标识、障碍物、路面的明亮度等)进行检测,将周边环境信息输出至信号机控制部542。
106.交通用照明装置545具有绿色(green)、黄色(yellow)、红色(red)的3色显示灯。
107.图5是例示车辆1在十字路口c处试图左转时的状态的图。如图5中例示那样,在十字路口c配置有人行横道z1~z4。在人行横道z1~z4的附近各自设置有路灯53a~53d。此外,在本说明书中,有时作为包含路灯53a~53d的表现而使用路灯53。另外,在人行横道z1~z4的附近各自设置有信号机sg1~sg4。在图5中例示的状态下,信号机sg2及sg4显示出绿信号(表示许可车辆的行进的信号),信号机sg1及信号机sg3显示出红信号(表示不许可车辆的行进的信号)。此外,也可以是信号机sg1~sg4全部具有信号机54的功能,也可以是仅信号机sg1~sg4的一部分具有信号机54的功能。在本实施方式中,设为仅信号机sg1具有信号机54的功能而进行说明。另一方面,信号机sg2~sg4具有用于与信号机sg1进行通信的无线通信部、与路面描绘装置543相同结构的路面描绘装置和与交通用照明装置545相同结构的交通用照明装置。信号机sg1的信号机控制部542也能够经由无线通信部541,对信号机sg2~sg4的路面描绘装置进行控制。
108.如图5中例示那样,车辆1在人行横道z2上经过,在十字路口c处试图左转。另一方面,行人p试图横穿人行横道z1。此时,车辆1的照相机6对作为周边环境信息的行人p的存在进行检测,将周边环境信息输出至车辆控制部3。车辆控制部3根据接收到的周边环境信息,判断为需要朝向行人p,将表示车辆1试图经过人行横道z1的信息在行人p附近的路面即区域s1进行描绘。
109.如果车辆控制部3判断为需要针对行人p传递规定的信息,则车辆1的车辆控制部3生成希望进行路面描绘的信号及表示希望进行路面描绘的位置(区域s1)的信号。车辆控制部3将这些信号经由无线通信部10而发送至交通用基础设施50。这些信号经由信号机sg1(54)的无线通信部541而发送至信号机sg1(54)的指令部546。
110.指令部546如果接收到希望进行路面描绘的信号,则基于表示希望进行路面描绘的位置的信号,对希望进行路面描绘的位置(区域s1)进行确定。指令部546在区域s1对于进行路面描绘而言过亮的情况下,进行用于将区域s1的明亮度设为适于进行路面描绘的明亮度的控制。区域s1的明亮度是根据从路灯53的路灯控制部534所取得的信息、或者从照相机544所取得的信息而进行判断的。指令部546在区域s1对于进行路面描绘而言过亮的情况下,确定能够对与希望进行路面描绘的位置相对应的照射区域进行照射的路灯53。此外,指令部546也可以仅基于表示希望进行路面描绘的位置的信号而执行该处理。
111.指令部546如果确定出希望进行路面描绘的位置和能够对与希望进行路面描绘的位置相对应的照射区域进行照射的路灯53,则生成用于对路灯53进行控制的信号,将该控制信号发送至路灯53。在本实施方式中,希望进行路面描绘的场所是区域s1。因此,指令部
546向对区域s1照射光的路灯53a发送控制信号。
112.如果路灯53a从指令部546接收到控制信号,则路灯53a的路灯控制部534对照明部531进行控制以使得减小从照明部531射出的光的亮度。此外,将从照明部531射出的光的亮度设为何种程度是基于从照相机533接收到的周边环境信息(例如,路灯53a的周围的明亮度),能够由路灯控制部534适当判断。其结果,区域s1的照度降低。
113.另外,指令部546生成路面描绘装置543朝向区域s1用于进行路面描绘的控制信号,将该控制信号发送至位于与区域s1最接近的信号机sg4。信号机sg4的路面描绘装置基于该控制信号而被控制。其结果,信号机sg4的路面描绘装置朝向区域s1照射激光,将表示车辆试图进入行人正试图横穿的人行横道的信息传递至行人p。
114.根据本实施方式所涉及的结构,即使希望进行路面描绘的路面由路灯53明亮地照明,也通过使由路灯53照明的区域的至少一部分变暗,从而路面描绘被明确地显示。因此,希望看见路面描绘的对象即行人p能够容易地识别到路面描绘出的信息。
115.另外,根据本实施方式所涉及的结构,交通用系统100包含有照射区域彼此不同的多个路灯53a~53d。指令部546使由多个路灯53a~53d之中的能够对与希望进行路面描绘的位置相对应的区域s1进行照射的路灯53a照明的区域的至少一部分变暗。因此,能够可靠地使希望进行路面描绘的位置的照度降低。
116.另外,根据本实施方式所涉及的结构,交通用系统100具有路面描绘装置543,且具有在地面设置的信号机54。具有路面描绘装置543的信号机54不移动,因此与由移动的车辆1进行路面描绘的情况相比,能够更可靠地在希望进行路面描绘的位置进行路面描绘。
117.(第二实施方式)
118.参照图6对本实施方式所涉及的交通用系统1100进行说明。此外,此后,对与第一实施方式共通的要素标注同一参照标号,省略重复的说明。图6例示出交通用系统1100的框图。如图6中例示那样,交通用系统1100具有交通用基础设施150和在车辆1设置的车辆系统2。
119.接下来,对交通用基础设施150进行说明。交通用基础设施150例如能够包含信号机、电线杆、路灯、铁塔等多个各种基础设施。如图6中例示那样,交通用基础设施150具有信号机1500和路灯153。
120.如图6及图7中例示那样,路灯153具有无线通信部1530(第3无线通信部)、照明部1531、照相机1533和控制部1534。它们经由总线1535彼此能够通信地连接。路灯153设置于车道、人行道等的附近的地面。
121.无线通信部1530构成为与后面记述的信号机1500的无线通信部151进行无线通信。无线通信部1530例如可以通过点对点模式与无线通信部151进行直接通信,也可以经由网络与无线通信部151进行通信。在本实施方式中,无线通信部1530配置于信号机1500的内部,但也可以配置于信号机1500的外部。
122.照明部1531例如是led灯等。另外,照明部1531可以具有包含与车辆用照明装置4的照明单元42相同结构的激光扫描装置的照明装置。因此,照明部1531具有作为路灯的照明功能和路面描绘功能。即,照明部1531能够朝向在路灯153的设置位置的附近所处的路面射出照明用的光,并且也能够进行路面描绘。如上所述,路灯153能够作为路面描绘装置起作用。
123.照相机1533是与照相机6相同的结构,因此省略说明。照相机1533构成为对路灯153的周围进行拍摄,由此对路灯153的周边环境(车辆、行人、道路形状、交通标识、障碍物等)进行检测,将周边环境信息输出至控制部1534。
124.控制部1534可以由与车辆控制部3相同的电子控制单元构成。控制部1534构成为对路灯153进行控制。控制部1534例如基于从照相机1533接收到的周边环境信息,能够对照明部1531进行控制。另外,控制部1534也能够根据接收到的周边环境信息,判断是否需要朝向行人、车辆等对象物,将规定的信息进行路面描绘。
125.接下来,参照图6及图8对信号机1500进行说明。如图6及图8中例示那样,信号机1500具有无线通信部151(第4无线通信部)、指令部152、请求取得部154、状况掌握部155、描绘单元156(路面描绘装置的一个例子)、控制部157、交通用照明装置158和车辆检测传感器159。它们经由总线160彼此能够通信地连接。信号机1500设置于车道、人行道等附近的地面。
126.无线通信部151构成为与车辆系统2的无线通信部10及路灯153的无线通信部1530进行无线通信。无线通信部151例如可以通过点对点模式与无线通信部10及无线通信部1530进行直接通信,也可以经由网络与无线通信部10及无线通信部1530进行通信。在本实施方式中,无线通信部151配置于信号机1500的内部,但也可以配置于信号机1500的外部。
127.请求取得部154例如能够经由无线通信部151而取得从车辆系统2发送出的希望进行路面描绘的信号和指定区域信息。指定区域信息包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息的至少一者。与希望进行路面描绘的区域相关的信息是与进行路面描绘的场所相关的位置信息。与希望看见路面描绘的对象相关的信息是与希望通过路面描绘而使其视觉识别规定的信息的行人、自行车、汽车等车辆等的位置、朝向、速度等相关的信息。请求取得部154如果接收到希望进行路面描绘的信号和指定区域信息,则将指定区域信息发送至指令部152。
128.状况掌握部155经由无线通信部151和无线通信部1530,与路灯153进行通信。状况掌握部155能够对在信号机1500的周围设置的路灯153和各路灯153能够描绘的区域进行确定。状况掌握部155对路灯153发送用于对路灯153所具有的照明部1531是否能够照射光(即,路灯153所具有的照明部1531是否没有故障)进行确认的信号。状况掌握部155基于来自路灯153的与该信号相对应的响应信号,判断各路灯153是否能够进行路面描绘。
129.状况掌握部155具有能够存储规定的信息的存储部。在状况掌握部155的存储部存储有与在信号机1500的周围设置的路灯153能够描绘的区域相关的信息。与路灯153能够描绘的区域相关的信息,例如包含设置有路灯153的位置、与从路灯153所具有的照明装置射出的光的光度等相关的信息。另外,在状况掌握部155的存储部,还存储有与描绘单元156能够描绘的区域相关的信息。
130.车辆检测传感器159可以是与车辆1的照相机6、雷达7相同的结构。
131.再次对状况掌握部155进行说明。状况掌握部155将用于对照明装置4是否能够照射光进行确认的信号发送至由车辆检测传感器159检测出的车辆1的车辆控制部3。状况掌握部155基于来自车辆控制部3的与该信号相对应的响应信号,判断车辆1的照明装置4是否能够进行路面描绘。状况掌握部155在判断为照明装置4能够进行路面描绘的情况下,状况掌握部155将用于取得与照明装置4能够描绘的区域相关的信息(与照明装置4能够照射的
范围、输出强度相关的信息等)的信号发送至车辆控制部3。车辆控制部3如果接收到该信号,则将与照明装置4能够描绘的区域相关的信息发送至状况掌握部155。
132.状况掌握部155基于与路灯153能够描绘的区域相关的信息,能够判断路灯153能够描绘的区域。另外,状况掌握部155能够基于与照明装置4能够描绘的区域相关的信息,判断照明装置4能够描绘的区域。并且,状况掌握部155能够基于与描绘单元156能够描绘的区域相关的信息,判断描绘单元156能够描绘的区域。关于判断为能够进行路面描绘的路灯153、车辆1的照明装置4及描绘单元156,状况掌握部155基于与路灯153、照明装置4及描绘单元156能够描绘的区域相关的信息,对路灯153、照明装置4及描绘单元156能够描绘的区域进行判断。然后,状况掌握部155将与确定出的路灯153、照明装置4及描绘单元156能够描绘的区域相关的信息发送至指令部152。
133.指令部152构成为经由无线通信部151和路灯153的无线通信部1530对路灯153的动作进行控制。另外,指令部152构成为经由无线通信部151和车辆系统2的无线通信部10对照明装置4的动作进行控制。指令部152可以由与车辆控制部3相同的电子控制单元构成。指令部152基于由请求取得部154取得的指定区域信息和由状况掌握部155确定出的路灯153、车辆1的照明装置4及描绘单元156能够描绘的区域,能够对路灯153、照明装置4及描绘单元156之中的最适于路面描绘的路面描绘装置进行确定。指令部152如果确定出最适于路面描绘的路面描绘装置,则生成指示信号。例如,在最适于路面描绘的路面描绘装置为路灯153时,指令部152对路灯153发送该指示信号。在最适于路面描绘的路面描绘装置为照明装置4时,指令部152对具有照明装置4的车辆1的车辆控制部3发送该指示信号。在最适于路面描绘的路面描绘装置为描绘单元156时,指令部152对描绘单元156发送该指示信号。而且,路灯153、照明装置4及描绘单元156的至少一个在规定的区域将规定的信息进行路面描绘。此外,指令部152也可以将最适于路面描绘的路灯153和/或照明装置4确定多个。
134.描绘单元156构成为朝向信号机1500的外部(例如,信号机1500附近的路面等)照射激光(例如,环状、线状的光图案)。描绘单元156可以包含与车辆用照明装置4的照明单元42相同结构的激光扫描装置。在本实施方式中,描绘单元156配置于信号机1500的外部,但例如也可以配置于信号机1500的内部。
135.控制部157可以由与车辆控制部3相同的电子控制单元构成。控制部157例如能够对信号机1500所具有的交通用照明装置158的切换动作进行控制。
136.交通用照明装置158具有绿色(green)、黄色(yellow)、红色(red)的3色显示灯。
137.图9是例示车辆1在十字路口c处试图左转时的状态的图。如图9中例示那样,在十字路口c配置有人行横道z1~z4。在人行横道z1~z4的附近各自配置有路灯153a~153d。路灯153a~153d是与路灯153相同的结构。路灯153a能够对区域s11照射光。路灯153b能够对区域s12照射光。路灯153c能够对区域s13照射光。路灯153d能够对区域s14照射光。另外,车辆1的照明装置4还作为路面描绘装置起作用。照明装置4能够对区域s12照射光。此外,在十字路口c设置有信号机sg11~sg14。信号机sg11~sg14各自设置于人行横道z1~z4的附近。在图9中例示的状态下,信号机sg12及sg14显示出绿信号(表示许可车辆的行进的信号),信号机sg11及信号机sg13显示出红信号(表示不许可车辆的行进的信号)。此外,可以是信号机sg11~sg14全部具有信号机1500的功能,也可以是仅信号机sg11~sg14的一部分具有信号机1500的功能。在本实施方式中,设为仅信号机sg11具有信号机1500的功能而进行说明。
另一方面,信号机sg12~sg14仅作为显示灯起作用。信号机sg11(1500)能够对区域s15照射光。
138.如图9中例示那样,车辆1在人行横道z2上经过,在十字路口c处试图左转。另一方面,行人p正试图横穿人行横道z1。此时,车辆1的照相机6对作为周边环境信息的行人p的存在进行检测,将周边环境信息输出至车辆控制部3。车辆控制部3根据接收到的周边环境信息,判断是否需要朝向行人p,将用于提示阻止横穿人行横道z1的信息在行人p附近的路面即区域s11进行描绘。
139.如果车辆控制部3判断为需要对行人p传递规定的信息,则车辆控制部3生成表示希望进行路面描绘的信号和包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息在内的指定区域信息的信号。在本实施方式中,希望进行路面描绘的区域为区域s11。希望看见路面描绘的对象是一边在d1方向行进、一边正试图横穿人行横道z1的行人p。此外,在与希望看见路面描绘的对象相关的信息包含与希望通过路面描绘而使其视觉识别规定的信息的行人p的位置、朝向、步行速度等相关的信息。车辆控制部3将这些信号经由无线通信部10发送至信号机1500。这些信号例如经由无线通信部151发送至请求取得部154。
140.请求取得部154如果接收到希望进行路面描绘的信号和指定区域信息,则将指定区域信息发送至指令部152。另外,此时,状况掌握部155对在信号机1500的周围设置的路灯153之中的能够对区域s11射出光的路灯153a,发送用于对路灯153a所具有的照明装置是否能够照射光进行确认的信号。状况掌握部155基于来自路灯153的与该信号相对应的响应信号,判断各路灯153是否能够进行路面描绘。并且,状况掌握部155针对由车辆检测传感器159检测出的车辆1,将用于对车辆1所具有的照明装置4是否能够照射光进行确认的信号发送至检测出的车辆1的车辆控制部3。状况掌握部155基于来自车辆控制部3的与该信号相对应的响应信号,判断车辆1的照明装置4是否能够进行路面描绘。另外,状况掌握部155对信号机1500的描绘单元156发送用于对是否能够照射光进行确认的信号。如上所述,状况掌握部155进行能够进行路面描绘的路灯153、照明装置4及描绘单元156的确定和该确定出的路灯153的照射区域、确定出的照明装置4的照射区域及确定出的描绘单元156的照射区域的确定。与确定出的路灯153的照射区域、确定出的照明装置4的照射区域及确定出的描绘单元156的照射区域相关的信息发送至指令部152。
141.指令部152接收指定区域信息和与确定出的路灯153的照射区域、确定出的照明装置4的照射区域及确定出的描绘单元156的照射区域相关的信息。接下来,指令部152基于由请求取得部154取得的指定区域信息、由状况掌握部155确定出的路灯153能够描绘的区域、确定出的照明装置4能够描绘的区域及确定出的描绘单元156能够描绘的区域,对路灯153、照明装置4及描绘单元156之中的最适于路面描绘的路面描绘装置进行确定。在本实施方式中,指令部152作为最适于路面描绘的路面描绘装置而对能够向区域s11照射光的路灯153a进行确定。指令部152如果确定出路灯153a,则生成指示信号,将该指示信号发送至路灯153a。路灯153a如果接收到该指示信号,则在区域s11,作为用于提示阻止行人p横穿人行横道z1的信息而将“stop”的文字进行路面描绘。此外,在指令部152接收到的指定区域信息,包含有与行人p的位置、朝向、速度等相关的信息,因此,“stop”的文字显示在行人p容易视觉识别的朝向及位置。
142.(第二实施方式中的第一变形例)
143.接下来,参照图10,对第二方式的第一变形例进行说明。图10是例示车辆1在十字路口c处试图左转时的状态的图。该第一变形例与第二实施方式的不同点在于,取代行人p,而是存在行驶于车辆1的旁边的自行车b。此外,关于其他结构,由于与第一实施方式或者第二实施方式相同,因此省略说明。
144.如图10中例示那样,车辆1在人行横道z2上经过,在十字路口c处正试图左转。另一方面,自行车b在车辆1的左侧行驶,向前方向(d2方向)直行,并正试图在人行横道z2上经过。此时,车辆1的照相机6对作为周边环境信息的自行车b的存在进行检测,将周边环境信息输出至车辆控制部3。车辆控制部3根据接收到的周边环境信息,判断是否需要朝向自行车b,将用于提示停止的信息在自行车b附近的路面即区域s12进行描绘。
145.车辆控制部3如果判断为需要对自行车b传递规定的信息,则车辆控制部3生成表示希望进行路面描绘的信号和包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息在内的指定区域信息的信号。在本变形例中,希望进行路面描绘的区域是区域s12。希望看见路面描绘的对象是在车辆1的左侧向前方向(d2方向)行进的自行车b。此外,在与希望看见路面描绘的对象相关的信息,包含与希望通过路面描绘而视觉识别规定的信息的自行车b的位置、朝向、速度等相关的信息。车辆控制部3将这些信号经由无线通信部10发送至信号机1500。这些信号经由信号机1500的无线通信部151(参照图8)发送至请求取得部154(参照图8)。
146.请求取得部154如果接收到希望进行路面描绘的信号和指定区域信息,则将指定区域信息发送至指令部152。另外,此时,状况掌握部155进行能够进行路面描绘的路灯153、照明装置4及描绘单元156的确定和该确定出的路灯53的照射区域、该确定出的照明装置4的照射区域及该确定出的描绘单元156的照射区域的确定。关于确定方法,由于与第二实施方式相同,因此省略说明。
147.在本变形例中,指令部152作为最适于路面描绘的路面描绘装置而对能够向区域s12照射光的路灯153b和车辆1的照明装置4进行确定。指令部152如果确定出路灯153b和照明装置4,则生成指示信号,将该指示信号发送至路灯153b及车辆1的车辆控制部3。其结果,路灯153b及照明装置4在区域s12,作为用于提示停止的信息而将“stop”的文字进行路面描绘。此外,在指令部152接收到的指定区域信息,包含与自行车b的位置、朝向、速度等相关的信息,因此“stop”的文字显示于自行车b的驾驶员容易视觉识别的朝向及位置。
148.(第二实施方式中的第二变形例)
149.接下来,参照图11及图12,对第二实施方式的第二变形实施例进行说明。图11是本变形例所涉及的交通用系统1100a的功能框图。
150.图12是例示主线道路r1和支线道路r2合流的道路r的情形的图。道路r例如是高速道路的合流地点处的道路。该第二变形例与第二实施方式的不同点在于,交通用系统1100a所涉及的交通用基础设施150a取代信号机1500而是包含铁塔200。铁塔200与信号机1500的不同点在于,不具有描绘单元156、交通用照明装置158和车辆检测传感器159,而是具有拍摄部161。此外,在下面的说明中,关于与第一实施方式或者第二实施方式相同的结构而省略说明。
151.拍摄部161具有能够对铁塔200的周边环境(车辆、行人、道路形状、交通标识、障碍
物等)进行拍摄的照相机和能够对由该照相机拍摄到的图像进行解析的图像处理部。该照相机可以是与照相机6相同的结构。在本变形例中,拍摄部161设置于铁塔200的上部,但也可以设置于除此以外的场所。拍摄部161例如对包含道路r的周边环境的图像进行拍摄,对由拍摄部161拍摄到的图像进行解析。根据图像解析的结果,拍摄部161例如判断为需要朝向在铁塔200的周边行驶的车辆,将用于提示减速的信息在该车辆附近的路面进行描绘。在该情况下,拍摄部161生成表示希望进行路面描绘的信号和包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息在内的指定区域信息的信号。这些信号发送至请求取得部154。
152.如图12中例示那样,在道路r的附近设置有路灯153a~153d。路灯153a配置于支线道路r2的侧方。路灯153b~153d配置于主线道路r1的侧方。路灯153a能够对区域s21照射光。路灯153b能够对区域s22照射光。路灯153c能够对区域s23照射光。路灯153d能够对区域s24照射光。
153.在路灯153a的附近存在与车辆1不同的车辆v。车辆v在支线道路r2正在行驶。在路灯153b的附近存在车辆1。车辆1在主线道路r1正在行驶。此外,车辆v也可以是与车辆1相同的结构。车辆1在主线道路r1向前方向直行。另一方面,车辆v在支线道路r2向右前方向行进,正试图向主线道路r1合流。此时,铁塔200的拍摄部161对包含道路r的周边环境的图像进行拍摄,对拍摄到的图像进行解析。而且,拍摄部161判断为需要朝向车辆1,将用于提示减速的信息在车辆1的附近的路面进行描绘。
154.拍摄部161如果判断为需要对车辆1传递规定的信息,则生成表示希望进行路面描绘的信号和包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息在内的指定区域信息的信号。这些信号发送至请求取得部154。在本变形例中,希望进行路面描绘的区域是区域s22。希望看见路面描绘的对象是在主线道路r1向前方向正在直行的车辆1。此外,在与希望看见路面描绘的对象相关的信息,包含与希望通过路面描绘而使其视觉识别规定的信息的车辆1的位置、朝向、速度等相关的信息。这些信号发送至请求取得部154。
155.请求取得部154如果接收到希望进行路面描绘的信号和指定区域信息,则将指定区域信息发送至指令部152。另外,此时,状况掌握部155进行能够进行路面描绘的路灯153及照明装置4的确定和该确定出的路灯153的照射区域及该确定出的照明装置4的照射区域的确定。关于确定方法,由于与第二实施方式相同,因此省略说明。
156.在本变形例中,指令部152作为最适于路面描绘的路面描绘装置,对能够向区域s22照射光的路灯153b和车辆1的照明装置4进行确定。指令部52如果确定出路灯153b和照明装置4,则生成指示信号,将该指示信号发送至路灯153b及车辆1的车辆控制部3的任一者。其结果,路灯153b或者照明装置4在区域s22,作为用于提示减速的信息,将“slow”的文字进行路面描绘。此外,在指令部152接收到的指定区域信息,包含有与车辆1的位置、朝向、速度等相关的信息,因此。“slow”的文字显示于车辆1的驾驶员容易视觉识别的朝向及位置。
157.根据本实施方式所涉及的结构,交通用基础设施150、150a所具有的指令部152基于包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息在内的指定区域信息、和由状况掌握部155确定出的路灯153、车辆1的照明装置4及描绘单
元156能够描绘的区域,使由状况掌握部155确定出的路灯153、照明装置4及描绘单元156之中的最适合的路面描绘装置进行路面描绘。因此,交通用基础设施150能够实现最适合的路面描绘。
158.另外,根据本实施方式所涉及的结构,指定区域信息包含有与希望看见路面描绘的对象(例如,行人、自行车、汽车等车辆等)相关的信息。因此,例如,在通过路面描绘显示的信息为文字信息时,考虑希望看见路面描绘的对象的朝向等,将该文字信息进行路面描绘,因此希望看见路面描绘的对象容易识别该文字信息。
159.另外,根据本实施方式所涉及的结构,在交通用基础设施150a具有拍摄部161的情况下,指定区域信息由拍摄部161生成,发送至请求取得部154。因此,交通用基础设施150a即使不与车辆1进行通信,也能够实现最适合的路面描绘。
160.(第三实施方式)
161.关于本实施方式所涉及的交通用系统2100,参照图13进行说明。图13例示出交通用系统2100的框图。如图13中例示那样,交通用系统2100具有在车辆1设置的车辆系统2和信号机250(交通用基础设施的一个例子)。
162.本实施方式所涉及的车辆控制部3还具有作为车辆控制部3的检测部20。车辆控制部3能够生成请求信号。请求信号例如是在车辆1右转时用于请求对可能进入至车辆1前进的行进路线上的其他车辆进行检测的信号。由车辆控制部3生成的请求信号发送至检测部20或者信号机250。检测部20基于从传感器5、照相机6接收到的信息,能够对处于车辆1的周围的其他车辆进行检测。
163.接下来,使用图13及图14,对信号机250进行说明。此外,信号机250例如能够置换为电线杆、路灯、铁塔等其他基础设施。如图13中例示那样,信号机250具有无线通信部251(第5无线通信部)、照相机252、控制部253、通知部254和交通用照明装置258。它们经由总线259彼此能够通信地连接。
164.无线通信部251构成为与车辆系统2的无线通信部10进行无线通信。无线通信部251例如可以通过点对点模式与无线通信部10进行直接通信,也可以经由网络而与无线通信部10进行通信。在本实施方式中,无线通信部251配置于信号机250的内部(参照图14),但也可以配置于信号机250的外部。另外,信号机250能够经由无线通信部251,还与具有无线通信装置的其他信号机进行通信。并且,信号机250也能够经由无线通信部251而与和车辆1相同结构的多个车辆进行通信。
165.照相机252对信号机250的周边环境(车辆、行人、道路形状、交通标识、障碍物等)进行拍摄。照相机252构成为将拍摄数据输出至控制部253。在本实施方式中,照相机252配置于信号机250的外部(参照图14),但也可以配置于信号机250的内部。
166.控制部253构成为对信号机250的各种动作进行控制,具有检测部255和判断部256。控制部253例如基于从车辆1的车辆控制部3发送出的请求信号,对照相机252进行控制。具体地说,控制部253使照相机252对信号机250的周边进行拍摄,使拍摄数据发送至检测部255。在本实施方式中,控制部253配置于信号机250的内部(参照图14)。
167.检测部255基于从照相机252接收到的拍摄数据,对处于信号机250的周围的车辆、这些车辆的位置等进行检测。这些检测出的信息作为周边环境信息而发送至判断部256。此外,照相机252和检测部255也可以一体地构成。即,照相机252可以具有检测部255的功能。
168.判断部256根据从检测部255连续地接收到的周边环境信息而对处于信号机250的周围的车辆的速度、位置的变化进行计算,能够判断处于信号机250的周围的车辆是否减速或者停止。另外,判断部256基于周边环境信息,例如能够判定车辆1是否可以穿过有可能侵入车辆1的行进路线的其他车辆的前方而转弯。
169.通知部254具有路面描绘装置257。路面描绘装置257可以具有与照明装置4相同的照明装置。另外,通知部254基于控制部253的判断部256的输出,能够通知规定的信息(例如,与某车辆穿过处于与本车辆相对的位置的其他车辆的前方而转弯这一情况适当与否相关的信息)。通知部254所涉及的通知方法,例如存在通过路面描绘装置257进行路面描绘的方法、从通知部254所具有的扬声器输出声音等的方法等。
170.交通用照明装置258具有绿色(green)、黄色(yellow)、红色(red)的3色显示灯。
171.接下来,参照图15~图17,对交通用系统2100所执行的处理进行说明。图15是例示交通用系统2100所执行的处理流程的图。图16~图17是例示车辆1在十字路口c处试图右转时的状态的图。此外,在本实施方式中,如图16中例示那样,作为交通参加者,车辆1(下面,也称为“第一车辆1”)、第二车辆60、第三车辆70登场。第二车辆60是与第一车辆1相同的结构,能够与第一车辆1进行通信。另一方面,第三车辆70是通过手动驾驶进行操纵的摩托车,无法与第一车辆1进行通信。
172.如图16中例示那样,在十字路口c配置有人行横道z1~z4。在人行横道z1~z4的附近各自设置有信号机sg21~sg24。信号机sg21~sg24可以是它们全部具有信号机250的功能,也可以是仅信号机sg21~sg24的一部分具有信号机250的功能。在本实施方式中,设为仅信号机sg22具有信号机250的功能而进行说明。另一方面,信号机sg21及信号机sg23~sg24具有用于与信号机sg22通信的无线通信部、与交通用照明装置258相同结构的交通用照明装置和与通知部254相同结构的通知部。信号机sg22的控制部253也能够经由无线通信部251,对信号机sg21及信号机sg23~sg24的通知部进行控制。
173.在图16中例示的状态下,信号机sg21及信号机sg23的显示刚从红信号(表示不许可车辆的行进的信号)变为绿信号(表示许可车辆的行进的信号)。另一方面,信号机sg22及sg24的显示为红信号。第一车辆1处于人行横道z3的附近。第二车辆60处于人行横道z1的附近。第二车辆60是第一车辆1的逆向车辆。第三车辆70处于人行横道z1的附近,且第三车辆70在从第二车辆60观察时处于后方的区域。即,从人行横道z1至第二车辆60为止的距离比从人行横道z1至第三车辆70为止的距离短。在从第一车辆1观察时第三车辆70从第二车辆60的后方向第一车辆1接近而处于成为死角的区域。
174.如图15中例示那样,首先,在第一车辆1和第二车辆60之间进行车车间通信(step01)。具体地说,首先,第一车辆1的车辆控制部3例如基于从照相机6接收到的周边环境信息,掌握第二车辆60的存在。另一方面,第二车辆60的车辆控制部也同样地,掌握第一车辆1的存在。接下来,第一车辆1从无线通信部10将与第一车辆1相关的行驶信息发送至第二车辆60。另一方面,第二车辆60从第二车辆60所具有的无线通信部,将与第二车辆60相关的行驶信息发送至第一车辆1。作为与第一车辆1及第二车辆60相关的行驶信息,例如是与第一车辆1的速度、位置、行进路线等相关的信息及与第二车辆60的速度、位置、行进路线等相关的信息。如上所述,第一车辆1接收与第二车辆60相关的行驶信息,第二车辆60接收与第一车辆1相关的行驶信息。在与第一车辆1相关的行驶信息,包含第一车辆1正试图在十字
路口c右转的信息。
175.第一车辆1和第二车辆60可以是完全自动驾驶模式,也可以是由预先识别出行驶信息的驾驶员进行操纵的手动驾驶模式。例如,在第二车辆60为完全自动驾驶模式的情况下,第二车辆60的车辆控制部对第一车辆1正试图在十字路口c右转进行识别。另一方面,在第二车辆60为手动驾驶模式的情况下,第二车辆60基于从第一车辆1接收到的与第一车辆1相关的行驶信息,可以在第二车辆60的内部所具有的显示器,使表示第一车辆1正试图右转的信息进行显示。此外,第二车辆60的驾驶员例如通过对第一车辆1的方向指示器进行视觉识别,从而可以识别出第一车辆1正试图右转。如上所述,在第一车辆1和第二车辆60之间,即使不进行车车间通信,第二车辆60的驾驶员也能够识别出第一车辆1正试图右转。
176.在本实施方式中,第二车辆60或者第二车辆60的驾驶员对第一车辆1正试图右转进行识别,判断为应该使第一车辆1先右转。因此,第二车辆60的车辆控制部判断为第二车辆60应该停止,或者第二车辆60的驾驶员进行制动操作,将与该判断或者操作相关的信息传递至第一车辆1。另外,第二车辆60的车辆控制部针对第二车辆60所具有的照明装置,生成用于使表示第二车辆60停止的信息进行路面描绘的指示信号。第二车辆60的照明控制部基于该指示信号,对第二车辆60的照明单元进行控制。其结果,如图16中例示那样,在第二车辆60的前方,作为表示第二车辆60停止的信息,例如将“停止”这一文字进行路面描绘(step02)。其结果,第一车辆1的驾驶员识别出第二车辆60为了让第一车辆1右转而停止。此外,进行路面描绘的信息并不限定于文字,也可以是彩色、记号、图形等视觉性的信息。
177.此外,step02可以在信号机sg21及sg23从红信号切换为绿信号时,或者在仅许可右转的右转箭头显示时进行。在该情况下,尽管切换为绿信号,但将第二车辆60仍继续停止的信息发送至第一车辆1。另外,同样地,在第二车辆60的前方,将表示第二车辆60停止的信息进行路面描绘。
178.返回图15,对交通用系统2100所执行的处理进行说明。第一车辆1的车辆控制部3接收到第二车辆60停止,开始第一车辆1试图先右转的控制。此时,车辆控制部3生成请求信号,将该请求信号发送至信号机sg22(250)(step03)。接收到请求信号的信号机sg22(250)的控制部253基于接收到的请求信号,进行控制以使得照相机252对信号机sg22(250)的周边环境进行拍摄(step04)。照相机252拍摄到的拍摄数据发送至控制部253。
179.控制部253的检测部255根据照相机252拍摄到的拍摄数据,对第一车辆1、第二车辆60、第三车辆70进行检测(step05)。另外,此时,检测部255也能够对第一车辆1、第二车辆60、第三车辆70的位置进行检测。这些检测出的信息作为周边环境信息,发送至判断部256(step06)。此外,在本实施方式中,第三车辆70一边经过人行横道z1一边正试图直行。判断部256对第一车辆1、第二车辆60、第三车辆70的速度的变化进行计算,例如,能够判定第一车辆1是否可以穿过有可能侵入第一车辆1的行进路线的其他车辆的前方而转弯(step07)。
180.在step07中,判断部256基于从检测部255输出的包含第一车辆1、第二车辆60、第三车辆70的行驶信息的周边环境信息,判定第一车辆1是否可以穿过第二车辆60的前方而转弯。在判断部256判定为第一车辆1可以穿过第二车辆60的前方而转弯时(在step07中为yes),进入step08。另一方面,在判断部256判定为第一车辆1不能穿过第二车辆60的前方而转弯时(在step07中为no),进入step09。
181.在进入step08的情况下,通知部254作为与第一车辆1穿过第二车辆60的前方而转
弯这一情况适当与否相关的信息,将对第一车辆1提示右转的信息即“ok”这一文字通过通知部254的路面描绘装置257在第一车辆1的前方进行路面描绘(未图示)。在该情况下,第一车辆1或者第一车辆1的驾驶员能够判断为能够右转。此外,进行路面描绘的信息并不限定于文字信息,也可以是色彩、记号、图形等。
182.在进入step09的情况下,如图17中例示那样,通知部254作为与第一车辆1穿过第二车辆60的前方而转弯这一情况适当与否相关的信息,将对第一车辆1提示停止右转的信息即“stop”这一文字通过通知部254的路面描绘装置257在第一车辆1的前方进行路面描绘。在该情况下,第一车辆1或者第一车辆1的驾驶员能够判断为无法右转。此外,进行路面描绘的信息并不限定于文字信息,也可以是色彩、记号、图形等。
183.通知部254所涉及的通知方法除了通过路面描绘装置257进行路面描绘的方法以外,例如也可以是从通知部254所具有的扬声器输出声音等的方法等。并且,通知部254所涉及的通知方法可以是通知部254生成用于在信号机250和第一车辆1之间进行通信的信号,经由无线通信部251和第一车辆1的无线通信部10,将该信号发送至第一车辆1的方法。
184.根据本实施方式所涉及的结构,与第一车辆1穿过第二车辆60的前方而转弯这一情况适当与否相关的信息,通过路面描绘而传递至第一车辆1、其驾驶员等。因此,例如在第三车辆70处于第一车辆1的死角,且第一车辆1和第三车辆70经过十字路口c的推定时刻大致相同的情况下,第一车辆1或者第一车辆1的驾驶员能够判断为无法右转。相反地,在第三车辆70没有处于第一车辆1的死角的情况下,或者在所述推定时刻不同的情况下,第一车辆1或者第一车辆1的驾驶员能够判断为能够右转。如上所述,根据本实施方式所涉及的交通用系统2100,第一车辆1或者第一车辆1的驾驶员即使无法直接识别出其他车辆是否存在于第一车辆1的死角,第一车辆1或者第一车辆1的驾驶员通过交通用系统2100的通知部254,也能够判断第一车辆1穿过第二车辆60的前方而转弯这一情况适当与否。即,根据本实施方式所涉及的交通用系统2100,能够使交通参加者(在本实施方式中,为第一车辆1、其驾驶员)的便利性提高。
185.另外,根据本实施方式所涉及的结构,检测部255基于来自第一车辆1的请求信号对第三车辆70进行检测。因此,例如在第一车辆1试图右转的定时,检测部255进行动作,因此能够使检测部255高效地动作。
186.另外,根据本实施方式所涉及的结构,检测部255设置于信号机250。因此,例如,即使在第二车辆60不具有检测部的情况下,与第一车辆1穿过第二车辆60的前方而转弯这一情况适当与否相关的信息也会路面描绘在第一车辆1的附近。因此,与第一车辆1穿过第二车辆60的前方而转弯这一情况适当与否相关的信息容易被第一车辆1的驾驶员视觉识别。另外,在其他车辆处于第二车辆60和第三车辆70之间的情况下,第三车辆70处于对于第二车辆60而言成为死角的位置。在该情况下,使用能够从比较高的位置对十字路口c及十字路口c的周围进行检测的信号机250的检测部255是有效的。
187.另外,根据本实施方式所涉及的结构,通知部254包含有路面描绘装置257。因此,例如在第一车辆1为手动驾驶车辆时,与穿过第二车辆60的前方而转弯这一情况适当与否相关的信息通过路面描绘,视觉传递至第一车辆1的驾驶员。另外,例如在第一车辆1为自动驾驶车辆时,与穿过第二车辆的前方而转弯这一情况适当与否相关的信息,经由信号机250的无线通信部251而传递至第一车辆1。
188.此外,本发明并不限定于上述的实施方式,能够适当地变形、改良等。此外,上述的实施方式中的各结构要素的材质、形状、尺寸、数值、方式、数量、配置场所等如果能够实现本发明则是任意的,不受限定。
189.在上述的第一实施方式中,使用由信号机sg4进行路面描绘的例子进行了说明,但并不限定于该例子。例如,也可以是车辆1所具有的车辆用照明装置4或者路灯53的照明部531进行路面描绘。
190.在上述的第一实施方式中,使用由车辆控制部3判断是否需要将规定的信息进行路面描绘的例子进行了说明,但并不限定于该例子。例如,也可以是信号机54的信号机控制部542或者路灯53的路灯控制部534进行该判断。
191.在上述的第一实施方式中,使用如果路灯53a从指令部546接收到控制信号,则路灯53a的路灯控制部534对照明部531进行控制以使得降低从照明部531射出的光的亮度的例子进行了说明,但并不限定于该例子。例如,路灯53a也可以基于从指令部546发送的控制信号而使遮蔽部532动作,将从照明部531射出的光的全部或者一部分遮蔽,由此降低区域s1的照度。
192.在上述的第一实施方式中,一边示出在十字路口c处试图左转的车辆1和试图横穿十字路口c的人行横道z1的行人p之间的关系,一边对本发明进行了说明,但并不限定于该例子。例如,在直线状的道路中,在直行的车辆和试图横穿在该道路设置的人行横道的行人之间的关系中也能够应用本发明。
193.在上述的第一实施方式中,使用无线通信部541及指令部546设置于信号机54的例子进行了说明,但并不限定于该例子。例如,无线通信部541及指令部546能够通过有线或者无线与路灯53、电线杆或者信号机、电线杆、路灯等基础设施进行通信,且可以设置于在十字路口c附近的地下埋入的通信装置等。
194.在上述的第二实施方式及第二实施方式的第一变形例中,路灯153及信号机1500的至少一个可以具有与第二变形例的铁塔200所具有的拍摄部161相同的拍摄部。
195.在上述的第二实施方式、第一变形例及第二变形例中,指定区域信息设为包含与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息而进行了说明,但并不限定于该例子。指定区域信息也可以仅是与希望进行路面描绘的区域相关的信息及与希望看见路面描绘的对象相关的信息的任一者。
196.在上述的第二实施方式及第一变形例中,使用由车辆控制部3判断是否需要将规定的信息进行路面描绘的例子进行了说明,但并不限定于该例子。例如,可以是信号机1500的控制部157或者路灯153的控制部1534进行该判断。
197.在上述的第二实施方式及第一变形例中,使用无线通信部151设置于信号机1500的例子进行了说明,但并不限定于该例子。例如,无线通信部151也可以能够通过有线或者无线而与信号机、电线杆、路灯等基础设施进行通信,且设置于在十字路口c附近的地下埋入的通信装置等。
198.在上述的第二实施方式及第一变形例中,使用无线通信部1530设置于路灯153的例子进行了说明,但并不限定于该例子。例如,无线通信部1530也可以能够通过有线或者无线与信号机、电线杆、路灯、铁塔等基础设施进行通信,且设置于在十字路口c附近的地下埋入的通信装置等。
199.在上述的第二变形例中,使用无线通信部1530设置于路灯153的例子进行了说明,但并不限定于该例子。例如,无线通信部1530也可以能够通过有线或者无线与信号机、电线杆、路灯、铁塔等基础设施进行通信,且设置于在道路r的地下埋入的通信装置等。
200.在上述的第二实施方式及第一变形例中,无线通信部151、指令部152、请求取得部154、状况掌握部155、描绘单元156、控制部157、交通用照明装置158、车辆检测传感器159设置于信号机1500,但并不限定于该例子。无线通信部151、指令部152、请求取得部154、状况掌握部155、描绘单元156、控制部157、交通用照明装置158、车辆检测传感器159例如也可以设置于电线杆、路灯、铁塔等其他基础设施。另外,无线通信部151、指令部152、请求取得部154、状况掌握部155、描绘单元156、控制部157、交通用照明装置158、车辆检测传感器159也可以设置于单一的基础设施,也可以分散地设置于多个基础设施。
201.在上述的第二变形例中,无线通信部151、指令部152、请求取得部154、状况掌握部155、控制部157、拍摄部161设置于铁塔200,但并不限定于该例子。无线通信部151、指令部152、请求取得部154、状况掌握部155、控制部157、拍摄部161例如也可以设置于铁塔以外的其他基础设施。另外,无线通信部151、指令部152、请求取得部154、状况掌握部155、控制部157、拍摄部161也可以设置于单一的基础设施,也可以分散地设置于多个基础设施。
202.在上述的第二实施方式及第一变形例中,使用指令部152设置于信号机1500或者铁塔200的例子进行了说明,但并不限定于该例子。例如,指令部152也可以能够通过有线或者无线与信号机、电线杆、路灯、铁塔等基础设施进行通信,且设置于在十字路口c附近的地下埋入的通信装置等。
203.在上述的第三实施方式中,使用信号机250所具有的检测部255的例子进行了说明,但也可以使用第二车辆60所具有的检测部。在该情况下,第二车辆60处于第三车辆70的附近,因此能够可靠地对第三车辆进行检测。另外,第二车辆60所具有的检测部能够在第一车辆1试图右转的定时开始动作,因此也能够使第二车辆60所具有的检测部高效地动作。
204.在上述的第三实施方式中,第三车辆70是通过手动驾驶进行操纵的摩托车,但第三车辆70例如也可以是通过手动驾驶进行操纵的自行车、自动驾驶车辆等。
205.在上述的第三实施方式中,使用检测部255根据从照相机252接收到的拍摄数据,对处于信号机250的周围的车辆和这些车辆的位置进行检测的例子进行了说明,但并不限定于此。例如,在第三车辆70具有能够与信号机250进行通信的通信装置和gps时,检测部255可以从第一车辆1、第二车辆60、第三车辆70各自接收由第一车辆1的gps 9、第二车辆60的gps、第三车辆70的gps取得的第一车辆1的位置、第二车辆60的位置、第三车辆70的位置,根据接收到的位置信息,对处于信号机250的周围的车辆和这些车辆的位置进行检测。
206.本技术基于2019年5月16日申请的日本专利申请(特愿2019-092782号)、2019年5月16日申请的日本专利申请(特愿2019-092783号)及2019年5月27日申请的日本专利申请(特愿2019-098564号),在这里作为参照而引入其内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1