一种无人汽车实现路边车位智能管理系统的制作方法
1.本发明涉及一种无人汽车实现路边车位智能管理系统。
背景技术:
2.现在的路边停车一般采用地磁和人工抄牌收费的方式进行管理。这种方式人员的效率比较低,如果要实现多条道路的停车收费,需要使用很多的人员进行人工车辆拍照、车牌输入,从而导致整体运营的成本较高,现今很多地方为了减少收费管理人员,采用让车主通过微信、支付宝主动缴费的模式,缴费的比例比较低,甚至不到50%,大大影响了停车收费的正常运营。
3.有鉴于上述的缺陷,本设计人,积极加以研究创新,以期创设一种新型结构的无人汽车实现路边车位智能化管理系统,使其更具有产业上的利用价值。
技术实现要素:
4.为解决上述技术问题,本发明的目的是提供一种无人汽车实现路边车位智能管理系统。
5.为实现上述目的,本发明采用如下技术方案:
6.一种无人汽车实现路边车位智能管理系统,包括若干停车位,还包括有智能停车管理系统、无人驾驶车辆、车牌识别相机装置、车载调整装置以及etc装置,每一个所述停车位上设置有地磁,所述地磁的输出端与智能停车管理系统的输入端相连,所述无人驾驶车辆上设置有etc装置,所述etc装置的输入端与车载etc相交互连接,所述etc装置的输出端与智能停车管理系统的输入端相连,所述无人驾驶车辆的顶端上设置有车载调整装置,所述车载调整装置上设置有车牌识别相机装置,所述车牌识别相机装置的输出端与智能停车管理系统的输入端相连。
7.优选地,所述的一种无人汽车实现路边车位智能管理系统,所述智能停车管理系统包括信号接收模块、处理模块、mcu模块以及信号传输模块,所述信号接收模块的输入端通过第一通讯模块与地磁、etc装置和车牌识别相机装置的输出端相连,所述信号接收模块的输出端与处理模块的输入端相连,所述处理模块的输出端与mcu模块的输入端相连,所述mcu模块的输出端与显示装置的输入端相连。
8.优选地,所述的一种无人汽车实现路边车位智能管理系统,所述第一通讯模块为无线模块。
9.优选地,所述的一种无人汽车实现路边车位智能管理系统,所述etc装置包括etc天线模块以及第二通讯模块,所述etc装置通过etc天线模块与智能停车管理系统相连。
10.优选地,所述的一种无人汽车实现路边车位智能管理系统,其特征在于:所述车牌识别相机装置包括车牌识别相机,所述车牌识别相机通过第二通讯模块与智能停车管理系统相连。
11.优选地,所述的一种无人汽车实现路边车位智能管理系统,所述车载调整装置包
括固定基座,所述固定基座上设置有升降平台,所述升降平台上设置有旋转台,所述旋转台上设置有车牌识别相机装置。
12.优选地,所述的一种无人汽车实现路边车位智能管理系统,所述第二通讯模块为无线模块。
13.借由上述方案,本发明至少具有以下优点:
14.本发明采用无人驾驶汽车进行停车信息的收集,并通过etc进行停车费用的扣缴,提高了效率,并能降低对人工收费的要求,大幅降低了路边停车管理收费的运营成本。
15.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
16.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
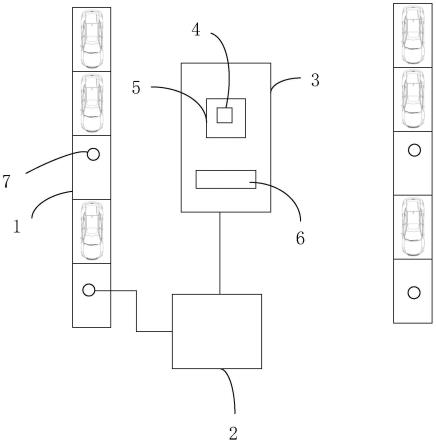
17.图1是本发明的结构示意图;
18.图2是本发明的内部连接示意图。
具体实施方式
19.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
21.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
23.实施例
24.如图1、图2所示,一种无人汽车实现路边车位智能管理系统,包括若干停车位1,还包括有智能停车管理系统2、无人驾驶车辆3、车牌识别相机装置4、车载调整装置5以及etc装置6,每一个所述停车位1上设置有地磁7,所述地磁7的输出端与智能停车管理系统2的输入端相连,所述无人驾驶车辆3上设置有etc装置6,所述etc装置6的输入端与车载etc相交互连接,所述etc装置6的输出端与智能停车管理系统2的输入端相连,所述无人驾驶车辆3
的顶端上设置有车载调整装置5,所述车载调整装置5上设置有车牌识别相机装置4,所述车牌识别相机装置4的输出端与智能停车管理系统2的输入端相连。
25.本发明中所述智能停车管理系统2包括信号接收模块21、处理模块22、mcu模块23以及信号传输模块24,所述信号接收模块21的输入端通过第一通讯模块25与地磁7、etc装置6和车牌识别相机装置4的输出端相连,所述信号接收模块21的输出端与处理模块22的输入端相连,所述处理模块22的输出端与mcu模块23的输入端相连,所述mcu模块的23的输出端与显示装置的输入端相连。
26.本发明中所述第一通讯模块25为无线模块。
27.本发明中所述etc装置6包括etc天线模块61以及第二通讯模块62,所述etc装置6通过etc天线模块与智能停车管理系统2相连。
28.本发明中所述车牌识别相机装置4包括车牌识别相机41,所述车牌识别相机41通过第二通讯模块62与智能停车管理系统2相连。
29.本发明中所述车载调整装置5包括固定基座51,所述固定基座51上设置有升降平台,所述升降平台上设置有旋转台,所述旋转台上设置有车牌识别相机装置4。
30.本发明中所述第二通讯模块为无线模块。
31.本发明的工作原理如下:
32.具体工作时,通过地磁负责识别车位上车辆停入和驶离,并将车位号、进入时间、离开时间上报给智能停车管理系统,无人驾驶车辆将携带车牌识别相机按照指定的路线进行行驶,在行驶的过程中,车牌识别相机将对停车位编号、所停车辆、车牌号进行拍照并识别。
33.汽车所携带的etc装也同时对路边车辆的obu进行信息读取。并将识别的结果上报给智能停车管理系统。如果由于遮挡等原因导致无法识别或者读取到车牌号时,智能停车系统将指示无人汽车与车载智能调整装置相互配合调节相机的拍摄距离和角度来确保能识别到正确的车牌号。
34.etc装在读取车辆信息时,如发现该汽车有欠费记录时,将通过etc管理系统进行欠费的追缴。
35.车牌识别相机将拍摄的视频进行存储,以便今后的记录查询。
36.智能停车管理系统负责将收集到的停车位、停车时间、车辆照片、车牌信息进行汇总,并根据车辆驶离的时间计算停车费用。停车管理系统向车主发送停车信息并收取停车费用。
37.如车位没有安装地磁时,将根据车牌识别相机识别的时间来计算车辆停入和驶出的时间。
38.以上所述仅是本发明的优选实施方式,并不用于限制本发明,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1