一种兼具参数与结构异质性的车辆队列控制方法和系统
1.本发明涉及智能交通领域,尤其是涉及一种兼具参数与结构异质性的车辆队列控制方法和系统。
背景技术:
2.汽车工业的蓬勃发展给人类的交通带来了巨大的便利,但车辆保有量的迅速上升也带来了交通堵塞、道路事故、环境污染等问题。针对车辆安全性和经济性,目前已有很多取得应用的技术,如先进驾驶员辅助系统(advanced driver assistance system,adas)和自适应巡航控制(adaptive cruise control,acc);但这些技术仅把单个车辆作为控制对象,不考虑多个车辆间的耦合作用,因而对于性能改善程度有限。近年来,车载通信技术快速发展,使得车辆间的协同控制成为可能。基于通讯的车辆队列控制技术又称为协同自适应巡航控制(cooperative adaptive cruise control,cacc),其可以显著减缓交通拥堵、改善交通效率、提高驾驶安全性和改进燃油经济性,因而得到了广泛研究。
3.目前已有诸多关于协同自适应巡航控制的相关专利。申请号:cn201910080391.5(考虑通信拓扑时变下的车辆队列跟驰稳定性控制方法)基于切换通信拓扑研究了队列系统稳定跟驰的控制方法,但是假设所有车辆的动力学模型相同,而实际车辆由于存在车型差异、动力总成差异及控制模式差异,可能具有不同的动力学模型参数甚至不同的动力学模型结构。申请号:201811204184.8(一种智能网联车辆编队的多时延稳定性分析方法)和申请号:201910571957.4(基于分布式有限时间状态观测器的多智能车辆编队方法)只针对特定的通信拓扑结构,如:前车跟随式、双前车跟随式、双向
‑
领航者跟随式等,无法适用一大类通信拓扑结构。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种兼具参数与结构异质性的队列控制方法和系统,在一般拓扑下保障兼具参数与结构异质性队列的系统稳定性,实现异构车辆队列的跟驰目标。
5.为实现上述目的,本发明提供了如下技术方案:一种兼具参数与结构异质性的车辆队列控制方法,包括如下步骤:
6.步骤1,将队列中的车辆从前到后进行0~n编号,其中第0辆车为领航车,其余n辆为跟驰车;本发明中用p
i
、v
i
、a
i
、u
i
、τ
i
分别表示车辆i(i=0,1,
…
,n)的位置、速度、加速度、控制输入(期望加速度)和纵向传动系统时滞常数;用x
i
=[p
i v
i a
i
]
t
,(i=0,1,
…
,n)表示车辆节点的状态向量。若跟驰车i可以接收领航车信息,记b
i
=1;否则b
i
=0。若跟驰车i可以接收第j辆车的信息,记m
ij
=1;否则m
ij
=0;
[0007]
步骤2,领航车采用速度控制的二阶模型,其动力学模型如下式给出:
[0008][0009]
其中,
[0010][0011]
控制输入为:u0(t)=v0;
[0012]
步骤3,跟驰车i(i=1,2,
…
,n)采用三阶动力学模型,其动力学方程如下式给出:
[0013][0014]
其中,(a
i
,b
i
)可以具有完全不同的矩阵参数,以表征不同车辆动力学参数与结构的异质性;
[0015]
步骤4,领航车向邻居车发送位置、速度、加速度信息;跟驰车接收邻居车信息和领航车信息,通过观测器计算得到领航车信息的观测值;
[0016]
步骤5,跟驰车辆采集自车的位置、速度和加速度信息,并根据接收的邻居车信息计算控制输入;
[0017]
步骤6,不断重复上述步骤4~5,提升队列系统的渐近稳定性。
[0018]
作为本发明的进一步改进,所述步骤3中的a
i
,b
i
需满足如下等式:
[0019]
a
i
π
i
+b
i
γ
i
=π
i
a0,
[0020]
其中,(γ
i
,π
i
)可选为使得a
i
,b
i
,a0满足上式的任意形式。
[0021]
作为本发明的进一步改进,所述步骤3中的a
i
,b
i
在满足等式的同时兼具参数与结构异质性动力学模型,广泛应用的有如下两种形式:
[0022][0023][0024]
作为本发明的进一步改进,所述步骤4中跟驰车接收邻居车信息包括邻居车辆对领航车位置、速度和加速度的观测值,所述观测器设计如下式给出:
[0025][0026][0027][0028]
作为本发明的进一步改进,所述步骤5的控制输入由下式计算:
[0029]
u
i
(t)=k
p,i
(p
r,i
‑
id0‑
p
i
)+k
v,i
(v
r,i
‑
v
i
)+k
a,i
(a
r,i
‑
a
i
)+γ
i
x
r,i
[0030]
其中,x
r,i
=[p
r,i v
r,i a
r,i
]
t
。
[0031]
作为本发明的进一步改进,所述观测器的控制增益选择如下式给出:
[0032][0033]
作为本发明的进一步改进,所述步骤5的控制输入中,控制增益选择范围由下式给出:
[0034]
是hurwitz矩阵,
[0035]
其中,其中,是hurwitz矩阵,可根据a
i
,b
i
的具体形式,由routh
‑
hurwitz判据推导出的取值范围。
[0036]
作为本发明的进一步改进,所述两种车辆模型的控制增益由下式给出:
[0037][0038]
作为本发明的进一步改进,所述步骤6与步骤5之间还进行在参数选择前串联自适应控制单元优化控制增益的选择步骤。
[0039]
本发明另一方面提供了一种系统,包括车载终端和运行服务器,所述车辆终端和运行服务器相互通信连接,以运行搭载所述方法的程序。
[0040]
本发明的有益效果:
[0041]
(1)所设计的兼具参数与结构异质性的车辆队列控制方法和系统将适用对象从车辆的队列匀质动力学模型推广到兼具参数和结构异质性的动力学模型,更契合工程实际,具有更大的应用价值;
[0042]
(2)所设计的兼具参数与结构异质性的车辆队列控制方法和系统不局限于特定的通信拓扑而可以适用于一大类通信拓扑结构,以跟进日益发展的通信技术;
[0043]
(3)所设计的兼具参数与结构异质性的车辆队列控制方法和系统仅基于软件层面的改变实现了异构队列的跟驰目标,不增加硬件成本,具有较好的示范应用价值。
附图说明
[0044]
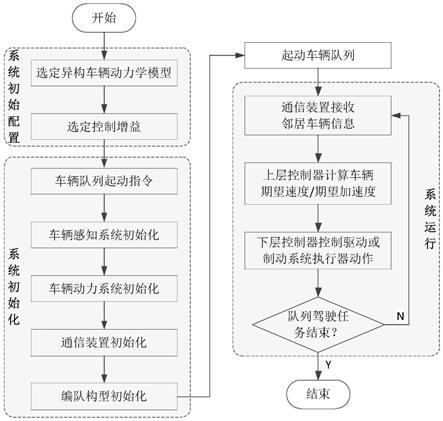
图1为本发明中实现车辆队列系统起动及运行流程图;
[0045]
图2为本发明中车辆队列通信拓扑结构图的实施例;
[0046]
图3为本发明中第i(i=1,2,
…
,n)辆车的控制流程图。
具体实施方式
[0047]
下面将结合附图所给出的实施例对本发明做进一步的详述。
[0048]
参照图1至3所示,为了解决智能交通领域参数与结构异质的车辆队列控制问题,提高交通系统的自动化水平和安全性、减轻驾驶员的负担,本实施例给出了一种兼具参数
与结构异质性的车辆队列控制方法和系统,并提供了该方法工程化的具体实施方式。
[0049]
本实施例考虑的车辆队列由n+1辆车辆组成,其中第0辆为领航车辆,其余n辆为跟随车辆。通信拓扑仅需满足存在以领航车为根节点的有向生成树,对具体的拓扑形式不作要求。每辆车上均安装有定位、通信及控制设备。定位设备采用gps和imu融合技术,可获取当前车辆的位置、速度和加速度信息,并将其发送至can总线。通信设备采用车载t
‑
box进行实时通信。通信设备可从can总线获取自车信息,将其发送给周围若干车辆,并接收其周围车辆信息。上层控制器由采集的自车信息和通信设备获取的邻居车辆信息,计算期望加速度并由can总线发送至底层控制器;底层控制器根据控制命令调整车辆的加速度以保持期望的队列几何构型。
[0050]
本发明提出的兼具参数与结构异质性的车辆队列控制方法具体步骤如下:
[0051]
(1)跟驰车根据自车的动力学特性,设计满足上述步骤3中要求的结构形式。本发明中给出如下两种控制结构以作示例:
[0052]
车辆类型1
[0053][0054]
车辆类型2
[0055][0056]
需要说明的是,除本发明提及的两种控制结构外,满足上述步骤3中等式要求的异质参数和异质结构的动力学模型均在本发明的保护范围内;
[0057]
(2)由下式给出的参数范围,选择控制增益:
[0058][0059][0060]
(3)车辆队列起动初始化:队列车辆接收到起动指令,经感知系统初始化、动力系统初始化、通信装置初始化成功后,起动队列系统;
[0061]
(4)队列构型初始化:将n+1辆车辆纵向排布,从前到后进行0~n编号,其中第0辆为领航车,后方n辆为跟随车;
[0062]
(5)第i(i=1,2,3,
…
,n)辆车均通过下述观测器方程计算领航车信息的观测值:
[0063][0064][0065][0066]
并将计算得出领航车信息观测值发送给邻居车辆;
[0067]
(6)第i(i=1,2,3,
…
,n)辆车通过车载t
‑
box接收邻居车辆的信息,即各邻居车辆对领航车位置、速度、加速度的观测值;通过读取车载can总线数据,获取自车的位置、速度和加速度信息。然后由下式计算控制输入:
[0068][0069]
(7)第i(i=1,2,3,
…
,n)辆车将计算得出的控制输入,即期望加速度或期望速度,发送至can总线,进而进入下层控制器;
[0070]
(8)若车辆当期望加速度高于节气门开度为零时实际加速度,将期望加速度输入驱动系统逆模型得到节气门开度α
f,i
=n
‑1(ω
i
,i
i
r
i
(m
i
u
i
+f
i
)),并施加至驱动系统,其中n
‑1为发动机转矩的逆函数,ω
i
、i
i
、r
i
、m
i
、f
i
分别为第i辆车的发动机转速、传动系统传动比、轮胎半径、质量与行驶阻力;若期望加速度低于节气门开度为零时实际加速度,将期望加速度输入制动系统逆模型得到制动压力并施加至制动系统,其中k
b,i
为制动系统增益。若车辆当期望速度高于实际车速时,将期望速度输入驱动系统逆模型得到节气门开度α
f,i
=n
‑1(ω
i
,i
i
r
i
(m
i
f(v
i
)+f
i
)),并施加至驱动系统,其中u
i
=f(v
i
),f(
·
)是控制术u
i
对车速v
i
的反函数;若期望速度低于实际速度时,将期望速度输入制动系统逆模型得到制动压力并施加至制动系统;
[0071]
(9)驱动系统或制动系统作用得到驱动力矩t
w
或制动力矩t
b
并施加至车身,使车辆获得实际加速度a
r
;
[0072]
(10)每个跟随车辆不断重复上述步骤5~9,实现车辆队列行驶。
[0073]
实施例
[0074]
以一个含有8辆车的队列为例,如图2所示。
[0075]
如图1和图3所示,队列系统起动后,领航车将自车的位置、速度和加速度信息发送
给邻居车;跟驰车根据邻居车信息按照上述步骤4中的观测器计算领航车信息的观测值,并通过车载通信装置将观测信息发送给邻居车。根据自车信息和接收的邻居车对领航车的观测信息,上层控制器由编制好的控制算法计算期望加速度或期望速度并通过can总线发送至下层控制器,下层控制器根据控制命令控制驱动系统及制动系统进行动作,以达到并保持期望的队列几何构型,直至队列驾驶任务结束。
[0076]
综上所述,本实施例的控制方法和系统,面向参数和结构异质队列系统,适用于一大类通信拓扑结构,且不增加硬件资源,保证车辆队列的渐近稳定性,提升交通容量、安全性和经济性。
[0077]
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1