匣钵位置监视装置和匣钵位置监视方法与流程
1.本发明涉及匣钵位置监视装置和匣钵位置监视方法。
背景技术:
2.以往,已知有将多个匣钵在炉宽度方向上并列地连续烧成的辊道窑等连续烧成炉。在这样的连续烧成炉中,关于输送方向的匣钵位置的偏移,例如,利用传感器来检测匣钵是否在给定的定时到达测定位置。另外,关于炉宽度方向的左右的偏移,目视或设置光电传感器来进行检测。
技术实现要素:
发明所要解决的课题
3.但是,在基于目视的匣钵位置的偏移的检测方法中,在连续烧成炉的运转中,作业人员必须持续地进行监视,而这是不现实的。另外,在基于传感器的匣钵位置的偏移的检测方法中,在变更匣钵位置的偏移的界限值的情况下,需要调整传感器位置,调整作业麻烦。
4.因此,本发明的目的在于提供一种匣钵位置监视装置以及匣钵位置监视方法,能够检测连续的匣钵位置的偏移,并且容易进行匣钵位置的偏移的界限值的变更。用于解决课题的技术方案
5.为了解决上述课题,本发明的第一方式的匣钵位置监视装置是一种设置于连续加热炉的匣钵位置监视装置(1),其特征在于,具备:透明的观察窗(2),其以从外部能观察到所述连续加热炉的内部的方式设置于所述连续加热炉的框体(10)的上表面;摄像机(3),其设置于所述连续加热炉的框体的上方,经由所述观察窗对所述连续加热炉内部的匣钵的位置进行拍摄;图像解析装置(41),其基于由所述摄像机拍摄到的图像来判断匣钵的位置是否位于给定范围内;以及警报装置(42、43),其在通过所述图像解析装置而判断为匣钵的位置未位于所述给定范围内的情况下发出警报。
6.此外,本发明的第二方式中的特征在于,在第一方式的匣钵位置监视装置中,所述图像解析装置能够按多个阶段设定所述给定范围。
7.此外,本发明的第三方式是一种连续加热炉,其特征在于,在连续加热炉的入口和/或出口处具备第一方式至第二方式的匣钵位置监视装置。
8.此外,本发明的第四方式是一种匣钵位置监视方法,其特征在于,包括:拍摄步骤(s1、s11、s21),通过摄像机对连续加热炉内部的匣钵的位置进行拍摄;第一匣钵位置判断步骤(s2、s12、s26),对通过所述拍摄步骤拍摄到的图像进行图像解析,判断匣钵的位置是否位于第一给定范围内;以及第一警报发出步骤(s3、s15、s29),在通过所述第一匣钵位置判断步骤而判断为匣
钵的位置未位于所述第一给定范围内的情况下发出警报。
9.此外,本发明的第五方式是一种匣钵位置监视方法,其特征在于,包括:拍摄步骤(s1、s11、s21),通过摄像机对连续加热炉内部的匣钵的位置进行拍摄;第一匣钵位置判断步骤(s2、s12、s26),对通过所述拍摄步骤拍摄到的图像进行图像解析,判断匣钵的位置是否位于第一给定范围内;以及输送停止步骤(s4),在通过所述第一匣钵位置判断步骤而判断为匣钵的位置未位于所述第一给定范围内的情况下使匣钵的输送停止。
10.此外,本发明的第六方式是一种匣钵位置监视方法,其特征在于,包括:拍摄步骤(s1、s11、s21),通过摄像机对连续加热炉内部的匣钵的位置进行拍摄;第一匣钵位置判断步骤(s2、s12、s26),对通过所述拍摄步骤拍摄到的图像进行图像解析,判断匣钵的位置是否位于第一给定范围内;第一警报发出步骤(s3、s15、s29),在通过所述第一匣钵位置判断步骤而判断为匣钵的位置未位于所述第一给定范围内的情况下发出警报;第二匣钵位置判断步骤(s14、s28),对通过所述拍摄步骤拍摄到的图像进行图像解析,判断匣钵的位置是否位于第二给定范围内;以及第二警报发出步骤(s16、s30),在通过所述第二匣钵位置判断步骤而判断为匣钵的位置未位于所述第二给定范围内的情况下发出警报。
11.此外,本发明的第七方式是一种匣钵位置监视方法,其特征在于,包括:拍摄步骤(s1、s11、s21),通过摄像机对连续加热炉内部的匣钵的位置进行拍摄;第一匣钵位置判断步骤(s2、s12、s26),对通过所述拍摄步骤拍摄到的图像进行图像解析,判断匣钵的位置是否位于第一给定范围内;第一警报发出步骤(s3、s15、s29),在通过所述第一匣钵位置判断步骤而判断为匣钵的位置未位于所述第一给定范围内的情况下发出警报;第二匣钵位置判断步骤(s14、s28),对通过所述拍摄步骤拍摄到的图像进行图像解析,判断匣钵的位置是否位于第二给定范围内;以及输送停止步骤(s17、s31),在通过所述第二匣钵位置判断步骤而判断为匣钵的位置未位于所述第二给定范围内的情况下使匣钵的输送停止。发明效果
12.本发明由于构成为使用摄像机从设置于连续加热炉的框体的上表面的透明的观察窗拍摄匣钵的位置,并通过图像解析装置来判断匣钵的位置是否位于给定范围内,因此在变更匣钵位置的偏移的界限值时,无需以物理的方式调整设置于炉内的传感器等的设置位置,变更作业容易。
附图说明
13.图1是说明将本发明的匣钵位置监视装置设置在连续加热炉的入口附近的情况下的概要的示意图。图2是连续加热炉的入口附近的俯视图。图3是基于匣钵位置监视装置的匣钵位置监视处理的流程图。图4是基于匣钵位置监视装置的匣钵位置监视处理的流程图。
具体实施方式
14.以下,参照附图对本发明的实施方式进行详细说明。对各附图所示的相同或等同的构成要素、部件、处理标注相同的附图标记,适当省略重复的说明。
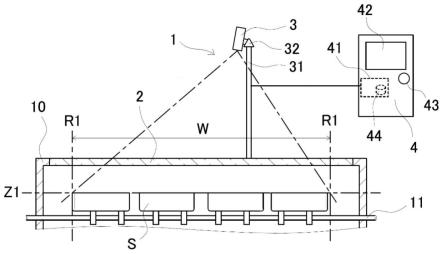
15.(第一实施方式)图1是说明将本发明的匣钵位置监视装置1设置于连续加热炉的入口附近的情况下的概要的示意图,将连续加热炉的入口附近的框体10沿纵向切断而示出。另外,匣钵位置监视装置1的设置位置也可以不是连续加热炉的入口,也可以设置于连续加热炉的出口、或入口和出口双方。此外,匣钵s也可以层叠为多层。
16.匣钵位置监视装置1具备:透明的观察窗2,其以从外部能观察到连续加热炉的内部的方式设置于连续加热炉的框体10的上表面;摄像机3,其设置于连续加热炉的框体10的上方,经由观察窗2对连续加热炉内部的匣钵s的位置进行拍摄;以及图像解析装置41,其基于由摄像机3拍摄到的图像来判断匣钵s的位置是否位于给定范围内。
17.在观察窗2设置有耐热性玻璃。连续加热炉的输送方向x上的观察窗2的长度w1优选为30cm以上,连续加热炉的宽度方向y上的观察窗2的长度w2优选为150cm以上。此外,观测窗2也可以进行分割。另外,也可以由多个开口构成。
18.另外,摄像机3设置在具备未图示的鼓风机的空冷框体内部。摄像机3由摄像机支承部件支承,摄像机支承部件具备:支承柱31,其在铅垂方向上能够调整高度;以及摄像机固定部件32,其设置在支承柱31的上端,将摄像机3固定为能够沿水平方向和/或上下方向进行旋转。
19.在本实施方式中,图像解析装置41通过将保存在存储装置44中的程序读入到计算机中并执行来予以实现。另外,具备:警报装置42、43,在通过图像解析装置41而判断为匣钵s的位置未位于给定范围内的情况下发出警报。在本实施方式中,警报装置42是以视觉的方式发出警告的显示器,警告装置43是以听觉的方式发出警告的扬声器。存储装置44还具备作为存储由摄像机3拍摄到的动态图像的动态图像存储装置的功能。通过图像解析装置41具备动态图像存储装置,从而用户能够确认警报发出时的匣钵s的倾斜,匣钵位置的偏移的发生原因或在炉内事故发生的情况下原因查明也变得容易。另外,图像解析装置41、警报装置42、43、记录装置44设置在与连续烧成炉相邻的操作装置的内部。
20.匣钵位置监视装置1通过由图像解析装置41判断匣钵s的位置是否位于给定范围内,由此来检测匣钵s的位置偏移。在本实施方式中给定范围是在匣钵s的高度位置z1处在连续加热炉的宽度方向y上设定的范围w,范围w优选为140cm以上且240cm以下。如图3所示,范围w是由沿着输送方向x延伸的边界线r1、r2所夹的范围,能够由匣钵位置监视装置1的用户进行设定、调整。图像解析装置41能够按多个阶段设定上述给定范围,例如,在本实施方式的图像解析装置41中,设定了由边界线r1所夹的第一给定区域和配置于比第一给定区域更靠外侧的由边界线r2所夹的第二给定区域。另外,边界线r1、r2也可以各自在左右以不同的值设定。
21.参照图3对利用匣钵位置监视装置1的匣钵位置监视处理的第一实施例进行说明。当连续烧成炉运转时,多个匣钵s在炉宽度方向上并列地被输送,匣钵位置监视装置1启动。当匣钵位置监视装置1启动时,匣钵位置监视装置1经由摄像机3取得匣钵位置的图像(s1)。接着,由图像解析装置41对所取得的图像进行处理,判断匣钵s是否位于第一给定范围r1内
(s2)。在匣钵s位于第一给定范围r1内的情况下(在s2中为“是”),返回至s1。另一方面,在匣钵s不位于第一给定范围r1内的情况下(s2中为“否”),经由显示器42、扬声器43发出第一警报(s3)。进而,对连续烧成炉发出用于停止匣钵输送的信号(s4),并结束处理。
22.通过实施这样的匣钵位置监视处理,能够检测匣钵位置的偏移并向用户发出警报,将炉内事故防患于未然。
23.接着,参照图4对利用匣钵位置监视装置1的匣钵位置监视处理的第二实施例进行说明。本实施例与第一实施例的不同点在于,除了具有判断匣钵s是否位于第一给定范围r1内的第一匣钵位置判断步骤以外,还具有判断匣钵s是否位于第二给定范围r2内的第二匣钵位置判断步骤。
24.当匣钵位置监视装置1启动时,匣钵位置监视装置1经由摄像机3取得匣钵位置的图像(s11)。接着,由图像解析装置41对所取得的图像进行处理,判断匣钵s是否位于第一给定范围r1内(s12)。匣钵s位于第一给定范围r1内的情况下(s12中为“是”),返回至s11。此外,在如后所述已经发出了第一警报的情况下,在s13中第一警报被关闭,但如果没有发出第一警报,则第一警报保持关闭不变。另一方面,在匣钵s不位于第一给定范围r1内的情况下(在s12中为“否”),判断匣钵s是否位于第二给定范围r2内(s14)。在匣钵s位于第二给定范围r2内的情况下(s14中为“是”),经由显示器42、扬声器43发出第一警报(s15),并返回至s11。另一方面,在匣钵s不位于第二给定范围r2内的情况下(s14中为“否”),经由显示器42、扬声器43发出第二警报(s16),进而对连续烧成炉发出用于停止匣钵搬送的信号(s17),并结束处理。
25.在第二实施例中,第一警报是用于提醒用户注意虽然匣钵s的位置偏移的程度不是使匣钵s的输送停止的程度,但已经出现了匣钵位置的偏移的征兆的信息。另外,第二警报是用于提醒用户注意匣钵s的位置偏移的程度超过界限值、若继续进行匣钵的输送则有可能发生炉内事故的信息。
26.通过实施这样的匣钵位置监视处理,通过按多个阶段设定给定范围r1、r2,能够按多个阶段检测匣钵位置的偏移的程度,因此能够更有效地监视匣钵位置的偏移的征兆,能够将炉内事故防患于未然。
27.通过实施这样的匣钵位置监视处理,能够检测匣钵位置的偏移。
28.根据本实施方式的匣钵位置监视装置1,由于构成为使用摄像机3从设置于连续加热炉的框体10的上表面的透明的观察窗2拍摄匣钵s的位置,并通过图像解析装置41判断匣钵s的位置是否位于给定范围内,因此在变更匣钵位置的偏移的界限值时,无需以物理的方式调整设置于炉内的传感器等的设置位置,能够在软件上变更给定范围,因此变更作业容易。另外,通过按多个阶段设定给定范围,能够按多个阶段检测匣钵位置的偏移的程度,因此能够更有效地监视匣钵位置的偏移的征兆,能够将炉内事故防患于未然。符号说明
[0029]1ꢀꢀ
匣钵位置监视装置10 连续加热炉的框体2
ꢀꢀ
观察窗3
ꢀꢀ
摄像机41 图像解析装置
42、43 警报装置s
ꢀꢀ
匣钵x
ꢀꢀ
输送方向y
ꢀꢀ
宽度方向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1