一种利用环视图像的车位识别方法
1.本发明涉及车位识别技术领域,具体涉及一种利用环视图像的车位识别方法。
背景技术:
2.在现有环视图像的情况下,通过只用一种约束条件来进行车位的识别,会造成误识别和未识别。亟需一种可以提高识别准确度的车位识别方法来解决上述问题。
技术实现要素:
3.针对现有技术的不足,本发明旨在提供一种利用环视图像的车位识别方法。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种利用环视图像的车位识别方法,具体过程为:
6.s1、图像预处理;
7.s2、确定泊车位拐点:
8.s2.1、首先利用霍夫直线检测方法检测出泊车位的直线,并获取直线的斜率和截距,将检测得到的直线及其斜率和截距数据封装成索引+数据的数据结构;
9.s2.2、按照斜率和截距对直线进行分类,将斜率与截距在设定误差范围内的直线段都合并在一起;
10.由于泊车位直线存在宽度,只有平行的直线且截距在设定范围内的直线才能被视作为泊车位的直线,根据此限制条件对不符合该宽度特征的直线进行去除;
11.由于泊车位的直线斜率只满足60
°
、90
°
以及120
°
这三种可能,根据该限制条件去除不满足上述条件的斜率及对应的截距;
12.完成对泊车位的直线的斜率和截距合并与筛选后,进行泊车位拐点的初步确立,初步确立的泊车位的拐点即为泊车位的直线中位线的交点;
13.s2.3、根据车位宽度以及一个车位需要两条平行直线的限制条件,筛选出不符合该限制条件的车位线;
14.s2.4、最后借助泊车位的几何约束来消除误检,泊车位的几何约束即为行业规范内设定的泊车位长宽大小比例,对符合约束条件的进行保留,对不符合约束条件的则进行消除;
15.s2.5、完成车位拐点的初筛选后,结合fast角点检测算法来提高识别的置信度,该算法检测角点的依据是判断待测点与周围点的关系,但是经过该算法检测出来的拐点包括真实点和干扰点,因此利用拐点与直线的位置关系以及计算欧氏距离,最终确定泊车位拐点;
16.s3、利用模板匹配识别车位:
17.首先根据步骤s2确定的泊车位拐点的位置,提取出感兴趣区域图像;然后对其感兴趣区域图像进行细化操作;
18.然后制作和感兴趣区域图像相同大小的用于模板匹配的模板元素集合;接下来对
模板元素集合中的每一个元素与细化后的感兴趣区域图像进行匹配,并对模板元素集合中的元素旋转固定角度再次与细化后的图像匹配,直至输出最好的匹配度,最终识别出车位类别和位置。
19.进一步地,步骤s1的具体过程为:
20.s1.1、环视图像中心区域为汽车图像,建立汽车掩码图像,所述汽车掩码图像和原始图像进行按位与操作,最终可以得到具有有效信息的彩色图像;
21.s1.2、对步骤s1.1得到的彩色图像进行灰度化,得到灰度图像;
22.s1.3、对步骤s1.2得到的灰度图像进行降噪,最终得到降噪处理后的图像。
23.更进一步地,步骤s1.2中,采用加权平均的方法来进行灰度化;加权平均的公式为:
24.gray
i,j
=γ*red
i,j
+ψ*green
i,j
+ω*blue
i,j
,其中γ+ψ+ω=1;
25.gray
i,j
为处理后的灰度图像中横坐标为i、纵坐标为j的像素点的像素值,red
i,j
为彩色图像红色通道中横坐标为i、纵坐标为j的像素点的像素值,green
i,j
为彩色图像的绿色通道中横坐标为i、纵坐标为j的像素点的像素值,blue
i,j
为彩色图像蓝色通道中横坐标为i、纵坐标为j的像素点的像素值,γ、ψ、ω分别为红、绿、蓝通道的权重系数,其总和为1。
26.更进一步地,步骤s1.3中,采用如下降噪公式实现降噪:
27.d
m,n
=s
m
‑
1,n
‑1*h
0,0
+s
m
‑
1,
n*h
0,1
+
…
+s
m+1,n+1
*h
2,2
;
28.h
0,0
,h
0,1
,
……
h
2,2
分别为大小3*3的滤波核函数的各个参数,s
m
‑
1,n
‑1,s
m
‑
1,n
,
……
,s
m+1,n+1
是以原始图像横坐标m、纵坐标n为中心的八个方向的像素点的像素值,d
m,n
为处理后的像素值。
29.进一步地,步骤s2.3中,考虑到光照对直线宽度的影响,通过直方图的计算来判断此时的光照情况,根据光照情况来进行调整,在光照较弱时,增加约束条件筛选出不符合该限制条件的车位线,以此来提升泊车位的识别能力。
30.进一步地,步骤s3中,模板图像与细化后图像之间的匹配度sim
tr
采用公式来计算;sim
tr
表示为模板图像和细化图像的相似度;φ
t
表示模板图像像素值的平均值,φ
r
表示细化图像像素值的平均值,ζ
tr
表示模板图像和细化图像的协方差,ζ
t
表示模板图像像素的均方误差,ζ
r
表示细化图像像素的均方误差,m,n为两个常数;如果匹配度函数值sim
tr
大于阈值ξ,则匹配成功;如果匹配度函数值sim
tr
小于阈值ξ,匹配失败。
31.本发明的有益效果在于:本发明首先对环视图像进行预处理,其次采用直线检测结合角点检测的双重约束条件来确定车位角点的位置,最后运用模板匹配方法来识别出车位的类别及位置。本发明借助双重约束条件降低了车位识别的误识别率,可以应用在自动泊车等高级驾驶辅助系统中。
附图说明
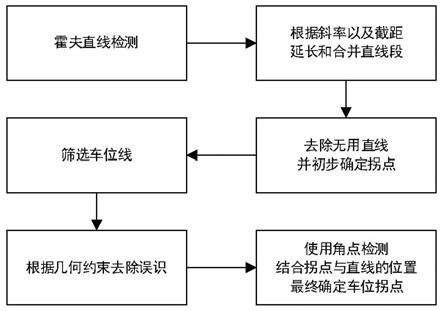
32.图1为本发明实施例方法中确定泊车位拐点的具体过程示意图;
33.图2为本发明实施例方法中模板匹配的具体过程示意图。
具体实施方式
34.以下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
35.本实施例提供一种利用环视图像的车位识别方法,具体过程为:
36.s1、图像预处理。
37.s1.1、在现有的环视图像下,并不是所有的区域都需要进行处理。环视图像中心区域为汽车图像,该部分在后续处理中并无意义,仅仅是为了美观,因此剔除该区域的信息,则可以有效地减少后续操作的运算量,同时也可以有效提高后续车位识别率。因此,本实施例中建立汽车掩码图像,所述汽车掩码图像和原始图像进行按位与操作,最终可以得到具有有效信息的彩色图像。
38.s1.2、其次为降低处理复杂度,对步骤s1.1得到的彩色图像进行灰度化,得到灰度图像。可采用加权平均的方法来进行该操作。加权平均的公式为:
39.gray
i,j
=γ*red
i,j
+ψ*green
i,j
+ω*blue
i,j
,其中γ+ψ+ω=1。
40.gray
i,j
为处理后的灰度图像中横坐标为i、纵坐标为j的像素点的像素值,red
i,j
为彩色图像红色通道中横坐标为i、纵坐标为j的像素点的像素值,green
i,j
为彩色图像的绿色通道中横坐标为i、纵坐标为j的像素点的像素值,blue
i,j
为彩色图像蓝色通道中横坐标为i、纵坐标为j的像素点的像素值,γ、ψ、ω分别为红、绿、蓝通道的权重系数,其总和为1。
41.s1.3、车位附近的环境较为复杂,不可避免会产生噪音,从而影响后续车位的识别,因此本实施例对步骤s1.2得到的灰度图像进行降噪,最终得到降噪处理后的图像。
42.降噪公式为:
43.d
m,n
=s
m
‑
1,n
‑1*h
0,0
+s
m
‑
1,n
*h
0,1
+
…
+s
m+1,n+1
*h
2,2
;
44.h
0,0
,h
0,1
,
……
h
2,2
分别为大小3*3的滤波核函数的各个参数,s
m
‑
1,n
‑1,s
m
‑
1,n
,
……
,s
m+1,n+1
是以原始图像横坐标m、纵坐标n为中心的八个方向的像素点的像素值,d
m,n
为处理后的像素值。
45.s2、确定泊车位拐点。
46.准确地定位一个泊车位需要获取泊车位直线的位置以及拐点的位置,本实施例采用直线检测结合角点检测双重约束的方法来进行泊车位拐点的确定。一个规范的泊车位由直线和拐点确定,所以定位一个泊车位,则需要清楚地知道直线的位置以及拐点的位置。本实施例使用一种由数据和索引两部分组成的数据结构。通过该种数据结构可对直线的斜率与截距进行双排序操作,并以此来完成斜率的初筛选。如图1所示,具体流程如下:
47.s2.1、首先利用霍夫直线检测方法检测出泊车位的直线,并获取直线的斜率和截距,将检测得到的直线及其斜率和截距数据封装成索引+数据的数据结构。
48.s2.2、在检测的直线结果中,原本一条完整的直线可能会因为某些因素而被分割成几条线段,所以本实施例按照斜率和截距对直线进行分类。由于直线的斜率与截距具有唯一性,所以属于同一条直线的线段集合中的线段斜率是近似的,在此基础上结合截距即可判断是否属于同一直线,以此来完成直线段的延长与合并,具体地,将斜率与截距在设定误差范围内的直线段都合并在一起。
49.由于泊车位直线存在宽度,这为无用直线的去除提供帮助,只有平行的直线且截
距在设定范围内的直线才能被视作为泊车位的直线。根据此限制条件对不符合该宽度特征的直线进行去除。
50.由于泊车位的直线斜率只满足60
°
、90
°
以及120
°
这三种可能,根据该限制条件去除不满足上述条件的斜率及对应的截距。
51.通过上述过程可对泊车位的直线的斜率和截距合并与筛选,实现对泊车位拐点的初步确立,初步确立的泊车位的拐点即为泊车位的直线中位线的交点。
52.s2.3、根据我国道路泊车位的行业规范,泊车位共有平行车位、倾斜车位以及垂直车位三种类型。这三种类型的泊车位都具有两条平行直线的特征,且泊车位大小为6m*2.5m,泊车位直线宽度为10cm,因此根据车位宽度以及一个车位需要两条平行直线的限制条件,筛选出不符合该限制条件的车位线。进行该筛选时,考虑到光照对直线宽度的影响,通过直方图的计算来判断此时的光照情况,根据光照情况来进行调整,在光照较弱时,增加约束条件以此来提升泊车位的识别能力。
53.s2.4、最后借助泊车位的几何约束来消除误检,泊车位的几何约束即为行业规范内设定的泊车位长宽大小比例,在检测过程中,可能会出现相同形状的图形,但其对应比例不同,则需要对符合约束条件的进行保留,对不符合约束条件的则进行消除。
54.s2.5、完成车位拐点的初筛选后,本实施例结合fast角点检测算法来提高识别的置信度,该算法检测角点的依据是判断待测点与周围点的关系,但是经过该算法检测出来的拐点包括真实点和干扰点,因此利用拐点与直线的位置关系以及计算欧氏距离,最终确定泊车位拐点。
55.s3、利用模板匹配识别车位。
56.本实施例利用一种模板匹配方法准确识别泊车位拐点的类型与位置,同时进一步去除上一阶段导致的误识别,具体过程如图2所示:
57.s3.1、首先根据步骤s2确定的泊车位拐点的位置,提取出感兴趣区域图像。然后对其感兴趣区域图像进行细化操作,该操作是为了提高模板匹配的效率和精度,并且准确获得拐点附近的结构信息。然后制作和感兴趣区域图像相同大小的用于模板匹配的模板元素集合。接下来对模板元素集合中的每一个元素与细化后的感兴趣区域图像进行匹配。并对模板元素集合中的元素旋转固定角度再次与细化后的图像匹配,直至输出最好的匹配度,最终识别出车位类别和位置。
58.模板图像与细化后图像之间的匹配度sim
tr
可采用公式可采用公式来计算。sim
tr
表示为模板图像和细化图像的相似度。φ
t
表示模板图像像素值的平均值,φ
r
表示细化图像像素值的平均值,ζ
tr
表示模板图像和细化图像的协方差,ζ
t
表示模板图像像素的均方误差,ζ
r
表示细化图像像素的均方误差,m,n为两个常数。如果匹配度函数值sim
tr
大于阈值ξ,则匹配成功。如果匹配度函数值sim
tr
小于阈值ξ,匹配失败。
59.对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变和变形,而所有的这些改变和变形,都应该包括在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1