一种速差自控器预警式装置及方法与流程
1.本发明涉及智能配变终端检测技术领域,特别涉及了一种速差自控器预警式装置及方法。
背景技术:
2.高处作业使用的高处作业安全带是保护作业人员安全的常用防护装备,强度大,耐用,简易轻便。然而在作业过程中常常移动需要拆除安全带,这时安全带无法保障人身安全,就使用速差自控器来保障作业人员安全。速差自控器又叫速差防坠器,用于人员高空作业防止意外坠落,即使意外坠落也能快速有效的保障人员安全,能在限定距离内快速制动锁定坠落人员,保护人员的生命安全。速差自控器通过抗棘齿双盘式制动系统,有效控制人体失控下坠;在电力行业中一般配合高处作业安全带使用。
3.但实际使用中无法排除人为的因素,还是会导致因此而产生的安全事故,因为误使安全带钩挂入其他位置未仔细检查是否正确挂入环内,或者移动过程中未系好速差自控器既开始移动作业和一些其他违章行为,为高处作业增加了很大的安全风险和隐患。作业人员因为疏忽为系好速差自控器导致发生不可挽回的事故或是地面人员往往不能了解高空作业安全带的情况,易形成作业人员违章作业提高了作业风险。
4.如中国专利局2020年12月4日公开了一种名称为一种带感应功能的速差自控器的实用新型,其公开号为cn212067500u。该实用新型包括防坠器本体以及通过锦纶吊绳与防坠器本体连接的两个挂钩,所述挂钩上铰接有卡板,所述卡板的两侧分别转动连接有卡杆,卡杆的转轴处设有铰轴,铰轴使卡杆处于竖直状态,所述卡板的两侧设有u形板,所述u形板由弹性板制成,u形板在弹性作用力下夹紧在卡板上,所述u形板的两侧分别设有供卡杆穿过的通槽,所述通槽呈横向,所述u形板的其中一侧固接有感应装置,所述感应装置包括盒体、设于盒体内部的主控板、通信模块、电源模块以及激光感应模块,所述主控板上集成有通信模块和电源模块,所述激光感应模块内设有激光发生器,所述激光发生器朝向挂钩的下端。但装置较为复杂,且安装有多个检测机构,成本较高。可以随时检测挂钩有没有勾住,但仍存在无法在使用时对速差自控器进行预警,无法提示使用人员速差自控器与各保险间的紧扣情况,地面人员也无法掌控高出作业人员实时情况。
技术实现要素:
5.本发明的目的是克服现有技术中传统的速差自控器不具备预警功能的问题,提供了一种速差自控器预警式装置,可以有效提示速差自控器与各保险间的紧扣情况,能够进行实时预警,降低安全事故发生的概率。
6.为了实现上述目的,本发明采用以下技术方案:一种速差自控器预警式装置,其特征在于,包括速差自控器本体以及预警感应装置,所述速差自控器本体包括速差自控器钩和安全带环,所述预警装置分别与速差自控器钩和安全带环连接,所述预警感应装置包括:供电模块:与控制模块连接,为控制模块提供供电电源;
控制模块:根据传感器模块的数据生成控制报警模块的指令,并能蓝牙模块交互,传输数据;传感器模块:包括与控制模块连接、检测速差自控器钩和安全带环是否连接红外传感器以及与蓝牙模块连接、检测速差自控器拉力的拉力传感器;报警模块:包括灯光报警模块和语音报警模块,用于提示速差自控器与各保险间的紧扣情况,能够进行实时预警;蓝牙模块:与终端模块交互,传输数据。
7.供电模块用于为装置提供供电电源,供电模块优选为7号锂电池1.2伏三节;蓝牙模块用于将控制模块的信息传递到终端模块,使得地面工作人员可以通过终端模块掌控高处作业人员实时情况,减少的管理风险到。通过传感器模块双重检测速差自控器和安全带连接是否可靠。报警模块能有效提示速差自控器与各保险间的紧扣情况,能够进行实时预警,降低安全事故发生的概率。使用时,将速差自控器预警式装置安装在速差自控器中,通过钢丝绳走线到钩,连接安全带环,当作业人员到达指定位置作业,系好速差自控器,速差自控器钩和安全带环接触或者传感器模块检测到速差自控器钩和安全带环连接,报警模块发出作出响应,向地面人员表示人员以系好速差自控器;连接不牢固时装置报警模块实时提供有效的警示。红外传感器可以检测速差自控器钩和安全带环是否连接,拉力传感器可以检测速差自控器拉力是否合格。蓝牙模块作为信息传递,与拉力传感器连接,可传输数据至地面。
8.作为优选,所述的拉力传感器包括所述的拉力传感器包括mcu处理模块、拉力采集模块、无线传输模块、电池监测模块以及rtc模块,所述拉力采集模块、无线传输模块、电池监测模块以及rtc模块均与mcu处理模块连接,所述无线传输模块与蓝牙模块连接。拉力传感器安装至速差自控器中与内部末尾钢丝绳连接以达到测力效果,同时无线传输模块连接至系统蓝牙模块接口处,传输数据进行预警。
9.作为优选,所述的控制模块包括mcu、电阻r24、检测接口con1、电阻r27以及电阻r28,所述电阻r24一端与mcu的p3.4输出端连接,电阻r24另一端与检测接口con1连接,所述mcu的p3.5输出端与红外传感器连接;所述电阻r27一端与mcu的p3.1输出端连接,另一端与蓝牙模块连接;所述电阻r28一端与mcu的p3.0输出端连接,另一端与蓝牙模块连接。所述检测接口con1优选为5.08mm的检测接口,所述mcu优选为stc15f102w芯片,所述电阻r24优选为4.7k。电阻r24为上拉电阻,使得mcu的p3.4管脚为高电平,当mcu检测到p3.4管脚为高电平时,p3.2管脚输出高电平;p3.3管脚为低电平。con1为检测接口,用导线把检测接口连接起来后(两根线分别接在检测接口的两个接口里),使得p3.4管脚为低电平,mcu检测到之后,p3.2管脚输出低电平, p3.3管脚输出高电平三次,间隔1s。
10.作为优选,所述的灯光报警模块包括led灯,所述led灯包括安装在速差自控器本体正面的第一光源和安装在速差自控器本体背面的第二光源;所述的语音报警模块包括蜂鸣器,所述蜂鸣器安装在速差自控器本体上。控制模块发出控制报警模块工作的指令,报警模块中的灯光报警模块和语音报警模块根据指令做出相应的回应。速差自控器本体正面和背面均安装有光源,便于观看,不会出现位于速差自控器本体另一面二看不见光源提示的情况;蜂鸣器用于在速差自控器钩和安全带环连接牢固时发出声音,提示作业人员速查自控器满足要求。
11.作为优选,所述的第一光源和第二光源均包括9个发光二极管和一个三极管,每个发光二极管的正极分别与一个电阻的一端连接,电阻另一端均与电源连接,每个发光二极管的负极均与三极管集电极连接,三极管发射极接地,三极管基极分别与两个电阻的一端连接。发光二极管上串联的电阻起限流作用,保护发光二极管。
12.作为优选,所述的语音报警模块包括电阻r23、蜂鸣器h、三极管q3、电阻r25以及电阻r26,所述电阻r23一端与电源连接,另一端与蜂鸣器h连接,蜂鸣器h与三极管q3的集电极连接,三极管q3的基极与电阻r25一端连接,电阻r25另一端与控制模块连接,电阻r26一端与三极管q3的基极连接,电阻r26另一端接地,三极管q3的发射极接地。所述电阻r25优选为1k,所述电阻r26优选为10k,所述电阻r23优选为100ω,所述三极管q3优选为npn三极管。所述电阻r25另一端与mcu的p3.3端口连接。当mcu检测到p3.4管脚为高电平时,p3.2管脚输出高电平,p3.3管脚输出低电平,蜂鸣器h不响。当mcu检测到p3.4管脚为低电平时, p3.3管脚输出高电平三次,间隔1s,蜂鸣器h响三声。
13.作为优选,还包括显示模块,所述显示模块包括显示屏,所述显示模块与蓝牙模块无线连接。显示模块通过蓝牙模块接收控制模块的数据,用于显示速差自控器当前状态,使得地面人员也可以掌控高出作业人员实时情况,减少的管理风险。
14.一种速差自控器预警方法,包括以下步骤:s1:将速差自控器预警式装置安装在速差自控器中,通过钢丝绳走线到钩,连接安全带环;s2:利用红外传感器双重检测速差自控器和安全带连接是否可靠,利用拉力传感器测量速差自控器拉力;s3:报警模块根据步骤s2中的测量结果作出反应;s4:根据报警模块的情况判断速差自控器和安全带连接是否可靠。
15.当使用速差自控器或作业过程系速差自控器时,速差自控器预警式装置与安全带接触后接通,红外传感器双重检测速差自控器和安全带连接是否可靠;通过速差自控器预警式装置确定是否预警,连接好速差自控器在安全带环并速差自控器拉力符合要求后蜂鸣器响三声,发光二极管不亮。若速差自控器与安全带连接处连接可靠,电阻降低,间隔1s后,蜂鸣器响三声;若速差自控器与安全带连接处连接不可靠,电阻加大,语音报警模块不响,灯光报警模块一直亮。
16.因此,本发明具有如下有益效果:1、可以解决作业人员因主观因素导致的安全风险同时,也提示作业人员本人防止误操作;2、地面人员也可以掌控高出作业人员实时情况,减少的管理风险,同时还处于“物联”状态,能有效提示速差自控器与各保险间的紧扣情况,能够进行实时预警,降低安全事故发生的概率;3、提醒了作业人员对安全的重视,有效避免了因为人为疏忽和违章作业,进一步提高高空作业的安全性。
附图说明
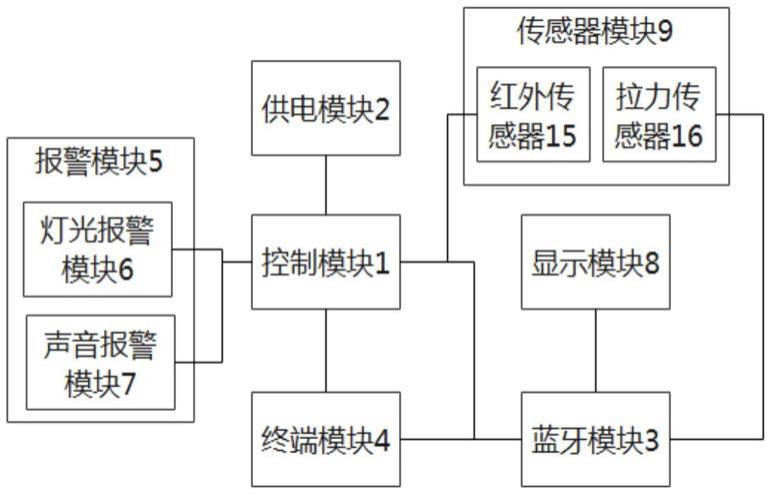
17.图1是本发明的系统结构示意图;图2是本发明的控制模块的电路结构示意图;图3为本发明的第一光源的电路结构示意图;图4为本发明的第二光源的电路结构示意图;
图5为本发明语音报警模块的电路结构示意图;图6是本发明拉力传感器的系统结构示意图;图7是本发明速差自控器预警方法的操作流程图;图中:1、控制模块;2、供电模块;3、蓝牙模块;4、终端模块;5、报警模块;6、灯光报警模块;7、语音报警模块;8、显示模块;9、传感器模块;10、mcu处理模块;11、拉力采集模块;12、无线传输模块;13、电池监测模块;14、rtc模块;15、红外传感器;16、拉力传感器。
具体实施方式
18.下面结合附图与具体实施方式对本发明作进一步详细描述:本实施例为一种速差自控器预警式装置及方法,如图1所示,包括控制模块1、供电模块2、报警模块5、显示模块8、wif模块3、传感器模块9以及终端模块4,所述传感器模块包括红外传感器15和拉力传感器16,所述供电模块、传感器模块、蓝牙模块以及报警模块均与控制模块连接,所述终端模块和显示模块均与wif模块连接,所述红外传感器与控制模块连接,所述拉力传感器与蓝牙模块连接。所述拉力传感器无线通信距离为200米,防护等级为ip67,测量精度小于等于0.5%。
19.所述的报警模块包括灯光报警模块和语音报警模块,所述灯光报警模块和语音报警模块均与控制模块连接。供电模块用于为装置提供供电电源,供电模块优选为7号锂电池1.2伏三节;蓝牙模块用于将控制模块的信息传递到终端模块,使得地面工作人员可以通过终端模块掌控高处作业人员实时情况,减少的管理风险。报警模块能有效提示速差自控器与各保险间的紧扣情况,能够进行实时预警,降低安全事故发生的概率。所述的报警模块包括灯光报警模块6和语音报警模块7,所述灯光报警模块和语音报警模块均与控制模块连接。控制模块发出控制报警模块工作的指令,报警模块中的灯光报警模块和语音报警模块根据指令做出相应的回应。
20.使用时,将速差自控器预警式装置安装在速差自控器中,通过钢丝绳走线到钩,连接安全带环,当作业人员到达指定位置作业,系好速差自控器,速差自控器钩和安全带环接触或者红外传感器检测到速差自控器钩和安全带环连接,在拉力传感器检测拉力合格下语音报警模块发出“哔哔哔”三声,表示连接牢固,同时光源不亮,向地面人员表示人员以系好合格有效的速差自控器;连接不牢固或速差自控器不合格时语音报警模块不响,光源高亮,实时提供有效的警示。蓝牙模块作为信息传递,可作用与传输数据至地面。
21.如图2所示,控制模块包括mcu、电阻r24、检测接口con1、电阻r27以及电阻r28,所述电阻r24一端与mcu的p3.4输出端连接,电阻r24另一端与检测接口con1连接,所述mcu的p3.5输出端与红外传感器连接;所述电阻r27一端与mcu的p3.1输出端连接,另一端与蓝牙模块连接;所述电阻r28一端与mcu的p3.0输出端连接,另一端与蓝牙模块连接。所述检测接口con1为5.08mm的检测接口,所述mcu为stc15f102w芯片,所述电阻r24为4.7k。电阻r24为上拉电阻,使得mcu的p3.4管脚为高电平,当mcu检测到p3.4管脚为高电平时,p3.2管脚输出高电平;p3.3管脚为低电平。con1为检测接口,用导线把检测接口连接起来后(两根线分别接在检测接口的两个接口里),使得p3.4管脚为低电平,mcu检测到之后,p3.2管脚输出低电平, p3.3管脚输出高电平三次,间隔1s。
22.如图3所示,第一光源包括二极管led
‑
r1、二极管led
‑
r2、二极管led
‑
r3、二极管
led
‑
r4、二极管led
‑
r5、二极管led
‑
r6、二极管led
‑
r7、二极管led
‑
r8、二极管led
‑
r9、电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电阻r8电阻r9、电阻r19、r21以及三极管q1;所述二极管led
‑
r1、二极管led
‑
r2、二极管led
‑
r3、二极管led
‑
r4、二极管led
‑
r5、二极管led
‑
r6、二极管led
‑
r7、二极管led
‑
r8、二极管led
‑
r9的负极均与三极管q1的集电极连接,二极管led
‑
r1的正极与电阻r1一端连接,二极管led
‑
r2的正极与电阻r2一端连接,二极管led
‑
r3的正极与电阻r3一端连接,二极管led
‑
r4的正极与电阻r4一端连接,二极管led
‑
r5的正极与电阻r5一端连接,二极管led
‑
r6的正极与电阻r6一端连接,二极管led
‑
r7的正极与电阻r7一端连接,二极管led
‑
r8的正极与电阻r8一端连接,二极管led
‑
r9的正极与电阻r9一端连接,电阻r1
‑
电阻r9的另一端均与电源连接,三极管q1的发射极接地,三极管q1的基极与电阻r19一端连接,电阻r19 另一端与mcu的p3.2管脚连接;电阻r21一端与三极管q1的基极连接,另一端接地。
23.所述二极管led
‑
r
‑
led
‑
r9均为发光二极管,所述电阻r1
‑
r9、电阻r19均为1k,所述电阻r21为10k,所述三极管q1为npn三极管。当mcu检测到p3.4管脚为高电平时, p3.2管脚输出高电平,发光二极管一直亮。当mcu检测到p3.4管脚为低电平时, p3.2管脚输出低电平,发光二极管不亮。
24.如图4所示,第二光源包括二极管led
‑
r10、二极管led
‑
r11、二极管led
‑
r12、二极管led
‑
r13、二极管led
‑
r14、二极管led
‑
r15、二极管led
‑
r16、二极管led
‑
r17、二极管led
‑
r18、电阻r10、电阻r11、电阻r12、电阻r13、电阻r14、电阻r15、电阻r16、电阻r17电阻r18、电阻r20、r22以及三极管q2;所述二极管led
‑
r10、二极管led
‑
r11、二极管led
‑
r12、二极管led
‑
r13、二极管led
‑
r14、二极管led
‑
r15、二极管led
‑
r16、二极管led
‑
r17、二极管led
‑
r18的负极均与三极管q2的集电极连接,二极管led
‑
r10的正极与电阻r10一端连接,二极管led
‑
r11的正极与电阻r11一端连接,二极管led
‑
r12的正极与电阻r12一端连接,二极管led
‑
r13的正极与电阻r13一端连接,二极管led
‑
r14的正极与电阻r14一端连接,二极管led
‑
r15的正极与电阻r15一端连接,二极管led
‑
r16的正极与电阻r16一端连接,二极管led
‑
r17的正极与电阻r17一端连接,二极管led
‑
r18的正极与电阻r18一端连接,电阻r10
‑
电阻r18的另一端均与电源连接,三极管q2的发射极接地,三极管q2的基极与电阻r20一端连接,电阻r20 另一端与mcu的p3.2管脚连接;电阻r22一端与三极管q2的基极连接,另一端接地。
25.所述二极管led
‑
r10
‑
led
‑
r18均为发光二极管,所述电阻r10
‑
r18、电阻r20均为1k,所述电阻r22为10k,所述三极管q2为npn三极管。当mcu检测到p3.4管脚为高电平时, p3.2管脚输出高电平,发光二极管一直亮。当mcu检测到p3.4管脚为低电平时, p3.2管脚输出低电平,发光二极管不亮。
26.如图5所示,语音报警模块包括电阻r23、蜂鸣器h、三极管q3、电阻r25以及电阻r26,所述电阻r23一端与电源连接,另一端与蜂鸣器h连接,蜂鸣器h与三极管q3的集电极连接,三极管q3的基极与电阻r25一端连接,电阻r25另一端与mcu的p3.3管脚连接,电阻r26一端与三极管q3的基极连接,电阻r26另一端接地,三极管q3的发射极接地。所述电阻r25为1k,所述电阻r26为10k,所述电阻r23为100ω,所述三极管q3为npn三极管。当mcu检测到p3.4管脚为高电平时, p3.2管脚输出低电平,蜂鸣器h不响。当mcu检测到p3.4管脚为低电平时, p3.2管脚输出高电平三次,间隔1s,蜂鸣器h响三声。
27.如图6所示,拉力传感器包括mcu处理模块10、拉力采集模块11、无线传输模块12、电池监测模块13以及rtc模块14,所述拉力采集模块11、无线传输模块12、电池监测模块13以及rtc模块14均与mcu处理模块10连接,所述无线传输模块12与蓝牙模块13连接。拉力传感器安装至速差自控器中与内部末尾钢丝绳连接以达到测力效果,同时无线传输模块连接至系统蓝牙模块接口处,传输数据进行预警。
28.如图7所示的实施例,一种速差自控器预警方法,包括以下步骤:s1:将速差自控器预警式装置安装在速差自控器中,通过钢丝绳走线到钩,连接安全带环s2:利用红外传感器双重检测速差自控器和安全带连接是否可靠,利用拉力传感器测量速差自控器拉力当使用速差自控器或作业过程系速差自控器时,速差自控器预警式装置与安全带接触后接通,红外传感器双重检测速差自控器和安全带连接是否可靠;通过速差自控器预警式装置确定是否预警,连接好速差自控器在安全带环并速差自控器拉力符合要求后蜂鸣器响三声,发光二极管不亮。
29.s3:报警模块根据步骤s2中的测量结果作出反应若速差自控器与安全带连接处连接可靠,电阻降低,间隔1s后,蜂鸣器响三声;若速差自控器与安全带连接处连接不可靠,电阻加大,语音报警模块不响,灯光报警模块一直亮。
30.s4:根据报警模块的情况判断速差自控器和安全带连接是否可靠若听见蜂鸣器响,则速差自控器与安全带连接处连接可靠;若看见发光二极管常亮,则说明未使用速差自控器或未系在安全带环上时或速差自控器拉力不符合要求。
31.以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1