1.本发明涉及一种车辆工况的构建方法,属于汽车在实际道路循环基于多维工况构建领域。
背景技术:2.汽车行驶工况又称车辆测试循环,是描述汽车行驶的速度
‑
时间曲线,一般总时间在1800秒以内,在采集大量实测数据的基础上,构建实际道路循环工况是车辆优化测试和仿真的数据支撑,是评价车辆排放、油耗、控制策略和参数匹配等的重要依据,是汽车研究中共性的核心技术。
3.汽车行驶的速度
‑
时间曲线在一般行驶道路中缺少对交通位置信息的确定,不能反应汽车在行驶道路中交通位置变化情况,且汽车位置信息的范围较大。
4.申请号为201710272568.2,专利名称为一种车联行驶工况构建方法的专利通过利用交通量大数据计算各速度权重:各速度区间的时长合成最终工矿曲线,更加真实的反映城市中行驶真实情况。该专利通过大数据处理对交通信息进行分类处理以提高行驶工况的真实性,但是缺少了对车辆行驶方向及位置信息的真实反映。
技术实现要素:5.本发明的目的是提供一种车辆工况的构建方法,用以解决现有技术难以综合的反映车辆在城市中的行程工况。
6.为实现上述目的,本发明的方案包括:
7.本发明的一种车辆工况的构建方法,包括以下步骤:
8.1)从城市中均匀采集汽车行驶数据,对汽车行驶数据进行短行程划分,短行程划分的标准为:某车辆从一个怠速状态开始到下一个怠速状态开始的过程;行驶数据包括行驶特征参数;
9.2)对短行程的行驶特征参数进行贡献率计算,筛选出若干个贡献率高的行驶特征参数作为主成分;贡献率为对应行驶特征参数对短行程描述的贡献率;
10.3)基于主成分,对短行程进行聚类,将短行程至少分为拥堵和畅通两类;
11.4)从每个分类中选出若干个短行程构成城市综合行驶工况,选出的各分类中短行程数量之间的比例与各分类中短行程总数的比例相同。
12.这样做的有益效果为:从城市中均匀采集汽车行驶数据,将这些汽车行驶数据进行短行程划分,在各短行程中提取出特征参数,将提取到的特征参数进行主成分分析,筛选出贡献率高的若干个主成分,将得到的主成分进行聚类分析,聚类出可以描述整个城市工况的各类短行程并至少分为拥堵和通畅两类,在大量的各类短行程中筛选出对应比例的短行程,组合成代表城市工况的城市综合行驶工况图。将城市综合行驶工况分为直路段和弯道段,根据城市综合行驶工况中的短行程得到速度
‑
时间曲线,根据速度
‑
时间曲线在直路段和弯道段运用不同的对应公式计算位移
‑
时间曲线,再结合汽车行驶的转角
‑
时间曲线生
成位移
‑
转角
‑
时间曲线,用位移
‑
转角
‑
时间曲线描述城市综合行驶工况。通过位移随转角的变化可反映车辆的行驶方向,反映出车辆运行中的实际信息更为全面。
13.进一步的,行驶数据还包括道路数据,根据组成城市综合行驶工况的短行程对应的速度
‑
时间关系及组成城市综合行驶工况的短行程对应的道路数据计算对应的位移
‑
时间曲线;所述速度
‑
时间关系从行驶数据中得到;用位移
‑
时间曲线表示城市综合行驶工况。
14.这样做的有益效果为:通过对汽车行驶过程中的道路数据的采集与计算构建出位移
‑
时间曲线,能够根据位移信息反映出汽车在行驶道路中交通位置的实时变化情况。
15.进一步的,城市综合行驶工况分为直路段和弯道段,分别计算直路段相对于起始点的直路位移和弯道段相对于起始点的弯路位移,将各个直路位移和弯道位移组合构成对应的城市综合行驶工况的位移
‑
时间曲线;所述道路数据包括:短行程中的直路之间的夹角、弯道圆心与起始点之间的距离、弯道半径、弯道圆心与起始点之间连线和对应弯道圆心与对应弯道起点的夹角;所述起始点为构成城市综合行驶工况的第一个短行程的起点。
16.进一步的,直路位移的计算方法为:
[0017][0018]
其中,s
i
为车辆在第i段路上的位移,所述第i段路为直路;s
i0
为车辆在第i
‑
1段路的终点的位移;t
i
为车辆从起始点o行驶到第i段路的起点的时间;t
i+1
为车辆从起始点o行驶到第i段路的终点的时间;α为第i
‑
1段路与第i段路之间的夹角。
[0019]
进一步的,弯道位移的计算方法为:
[0020][0021]
其中,r为第i段环状路圆环的半径;z为圆心;s
i
为车辆在第i段路上点的位移;s
i0
为从起始点o到z的距离;t
i
为车辆从起始点o行驶到第i段路的起点的时间;t
i+1
为车辆从起始点o行驶到第i段路的终点的时间;α为弯道圆心与起始点之间连线和对应弯道圆心与对应弯道起点的夹角。
[0022]
进一步的,将所述位移
‑
时间曲线与转角
‑
时间关系结合,构建位移
‑
转角
‑
时间曲线来表示城市综合行驶工况。
[0023]
这样做的有益效果为:通过实时测量的汽车行驶过程中的转角
‑
时间关系与位移
‑
时间关系的结合,构建出位移
‑
转角
‑
时间曲线来表示城市综合行驶工况,确定了汽车在行驶道路中交通位置信息的确定,缩小了汽车位置信息的范围。
[0024]
进一步的,步骤1)中汽车行驶数据包括:车速、转角、对应的时间及所行驶的道路情况。
[0025]
进一步的,步骤2)中短行程的行驶特征参数包括:运行时间、平均速度、最大速度、最大加速度、平均加速度、最大减速度、平均减速度、加速时间、减速时间、怠速时间、匀速时间、运行距离、平均运行速度、速度标准差、加速度标准差。
[0026]
进一步的,步骤2)中筛选出若干个贡献率高的行驶特征参数的方法为:通过主成分分析法选择贡献率最高的若干个行驶特征参数,且选出的行驶特征参数累计贡献率大于
设定值。
[0027]
这样做的有益效果为:通过主成分分析法计算贡献率大于设定值的行驶特征参数作为主成分,提高构建工况的准确率。
[0028]
进一步的,步骤3)中对短行程聚类为:拥堵、比较通畅、通畅。
附图说明
[0029]
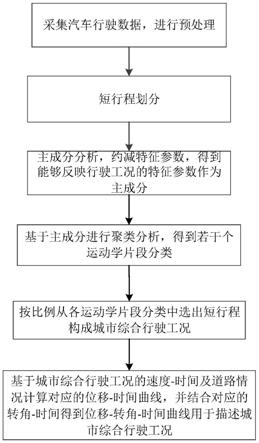
图1是本发明构建车辆工况流程图;
[0030]
图2是本发明运动学片段图;
[0031]
图3是本发明综合行驶工况图;
[0032]
图4是本发明直路路况;
[0033]
图5是本发明环状路接直路路况;
[0034]
图6是本发明环状路路况;
[0035]
图7是本发明多段环状路路况;
[0036]
图8是本发明位移
‑
转角
‑
时间曲线。
具体实施方式
[0037]
下面结合附图对本发明做进一步详细的说明。
[0038]
实施例:
[0039]
本发明提供一种新的车辆行驶工况的构建方法,首先对汽车在城市道路行驶中的车速、时间、所行驶过的直路段数及每段长度、转向次数及每个转向的角度信息进行纪录,再通过短行程划分、主成分分析选取四个主成成分,再利用k
‑
means聚类构成汽车行驶工况,计算得到速度
‑
时间工况信息;将建好的车速
‑
时间工况与实际路线结合起来得到位移变化,形成位移
‑
转角
‑
时间曲线。通过位移随转角变化可反映车辆行驶方向,其更能反映车辆运行中的实际信息更全面。如图1所示为构建车辆工况流程图,具体方法如下:
[0040]
1)采集汽车行驶数据:
[0041]
选取多条城市线路,采集汽车行驶数据,汽车行驶数据至少包括:车速、时间、所行驶过的直路段数、环状路段数、半径、角度及每段长度、转向次数及每个转向的角度,确保所采集数据量足够反映该城市的汽车行驶情况。
[0042]
2)短行程划分:
[0043]
将采集到的汽车行驶数据进行短行程划分形成运动学片段,运动学片段是指车辆从一个怠速状态开始到下一个怠速状态开始的运动过程,依次作为一个数据单元,通常包括一个怠速部分和一个行驶部分。运动学片段之间的差异性直接体现了汽车实际行驶过程中,行驶状态的不同情况和交通特征。将采集到的汽车行驶数据分割成连续的运动学片段,则全部实现数据由许多数据单元组成。
[0044]
如图2所示为运动学片段图,将车辆从一次停车开始到下一次启动开始的运动定义为怠速段;将车辆从一次启动开始到下一次停止开始定义为运行段;怠速段和运行段构成了一个运动学片段。
[0045]
3)对各运动学片段进行特征参数提取、主成分分析和聚类分析:
[0046]
①
选取15个特征参数对各运动学片段进行表征,构成n
×
15的特征参数矩阵(n为
片段个数),特征参数如表1所示,包括:运行时间、平均速度、最大速度、最大加速度、平均加速度、最大减速度、平均减速度、加速时间、减速时间、怠速时间、匀速时间、运行距离、平均运行速度、速度标准差、加速度标准差。特征参数分别由采集到的汽车行驶数据计算所得。
[0047]
表1特征参数表
[0048][0049][0050]
特征参数是后期对汽车行驶工况进行评价的重要指标。特征参数要能够对该运动学片段的特征进行较为详尽全面的表述,由于汽车运动是一个复杂过程,受到道路条件、环境、路段信息综合影响,因此只利用常规的速度和加速度对运动学片段进行表征是片面的容易造成整个过程的失真,对后续评价汽车运行工况产生不利影响。然而选用过多的特征参数对运动学片段进行表征,将会对算法的复杂性、以及结果分析造成困难。本发明选取15个特征参数来描述所有运动学片段,从而确保了片段描述的全面性。
[0051]
②
运行主成分分析法,计算15个特征参数中各成分的特征值、贡献率及累计贡献率,选出累计贡献率达到80%的主成分个数,对15个特征参数中信息重叠的特征参数进行降维。
[0052]
由于选取的15个特征参数之间具有一定的相关性,在表示同一个样本数据的特性时容易出现信息重叠的情况,并导致问题分析变得复杂,因此采用主成分分析法。该方法能够将原来代表样本信息的多个变量进行重组,转换为一个或几个新的综合变量,新的综合变量之间互不相关,能最大程度的反映样本信息特征,比原始变量更加具有代表性,同时降低问题分析的复杂度。
[0053]
a.基于主成分分析法求解各主成分贡献率、累计贡献率以及载荷矩阵的过程如下:
[0054]
采集到n个运动学片段对应形成n个样本,每个样本具有m个特征参数(m=15),构成n
×
m维矩阵如下:
[0055][0056]
其中y
ij
表示第i个样本第j个变量的值;
[0057]
b.将步骤a的矩阵标准化后得到标准化矩阵:
[0058][0059][0060]
其中,u
j
为每个变量的均值,σ
j
为方差;
[0061]
c.15个特征参数存在信息重叠的部分,因此用主成分分析法对特征参数进行降维处理:
[0062]
相关系数矩阵为:
[0063][0064]
其中,r
ij
的计算公式如下:
[0065][0066]
d.根据解方程组rb=λ
b
b计算对应的特征向量,将计算出的特征向量按照大小进行排序,λ1≥λ2≥
…
≥λ
n
≥0;
[0067]
e.计算主成分贡献率和累计贡献率,第i个成分的贡献率计算公式为:
[0068][0069]
累计贡献率计算公式如下:
[0070][0071]
如表2所示为各主成分的特征值、贡献率和累计贡献率表,将主成分按照贡献率由大到小排列,其中前4个主成分的累计贡献率已达到81.371%,故选取前4个主成分进行聚类分析。
[0072]
表2特征值、贡献率和累计贡献率
[0073][0074]
本发明选取的主成分数量为4个,根据下式得到各个运动学片段的这4个主成分的得分:
[0075][0076]
其中,b
ij
为特征值λ
i
对应的特征向量第j个值;
[0077]
根据各个运动学片段主成分得分得到各个运动学片段对应各个主成分的相关系数得分表,如表3所示,根据主成分得分表可对运动学片段进行分类。
[0078]
主成分的相关系数得分表(表3)通过如下方式获得:
[0079]
第一步,列出特征矩阵:
[0080][0081]
其中,m
ij
(i=1,2,3,...,p;j=1,2,3,...,q)为第i个运动学片段中的第j个特征参数。p为运动学片段个数,q为特征参数个数;
[0082]
第二步,对特征矩阵标准化;
[0083]
第三步,对标准化后的特征矩阵求其对应的协方差矩阵;
[0084]
第四步,根据协方差矩阵求出相关系数矩阵;
[0085]
第五步,求相关系数矩阵的特征值,即相关系数,将特征值从小到大排序,第一个特征值就是第一个主成分与原特征矩阵的相关系数,第二个特征值就是第二个主成分与原特征矩阵的相关系数。
[0086]
表3特征参数与前四个主成分的相关系数矩阵
[0087][0088]
③
运用经过初始聚类中心优化的k
‑
means算法对运动学片段分类。
[0089]
通过对四个主成分分析进行k
‑
means聚类分析,可聚为三类,分别代表拥堵、比较通畅、通畅工况。第一类工况(拥堵工况)片段数为3613,第二类工况(比较通畅工况)片段数为7219,第三类工况(通畅工况)片段数为2426。
[0090]
由聚类结果可见,三类片段数量比例约为3:6:2,因此从第一类选取2个短行程,从第二类选取6个短行程,从第三类选取2个短行程,组合成代表城市路况的综合行驶工况图,如图3所示。即:将选取的短行程所对应的道路与下一段短行程所对应的的道路按照各自的方向进行首尾相连,构建出代表城市整体路况的综合行驶工况;例如,上一个短行程中末尾一段南北向的直路和下一个短行程中开头一段东西向的直路连接后,在城市综合行驶工况中就形成了90度拐角相连的两段直路;或者上一个短行程中末尾一段南北向的直路和下一个短行程中开头一段南北向的直路连接后,在城市综合行驶工况中就形成了由上述两段直路组成的更长的直路。
[0091]
在城市道路中均匀采集到的汽车行驶数据中进行短行程划分形成运动学片段,并对这些运动学片段进行特征参数提取、主成分分析和聚类分析,形成代表拥堵、比较通畅、通常三种工况,并在这三种工况中选取对应的短行程形成综合行驶工况图,该图基本表示了该城市的汽车行驶工况。
[0092]
4)由速度
‑
时间结合实际行驶工况转向角度得到位移变化形成位移
‑
转角
‑
时间曲线。
[0093]
将构建的综合行驶工况图基本代表城市路况的基础上,在实际路线上短行程形成的运动学片段(每个运动学片段的起始点是一致的)有直路和环状路(本发明中实际工况中的弯路段不是环状路的情况下,将弯路段近似看作为环状路)的两种路况,将综合行驶工况里的各个短行程片段按照这两种路况进行划分,对于不同路况分别用不同公式计算位移信息:
[0094]
如图4所示为直路路况,通过以下公式可得位移
‑
时间曲线:
[0095][0096]
其中,s
i
为从初始点o到车辆在第i段路上点的位移;s
i0
为从初始点o到第i段路的起点a的位移;t
i
为车辆从初始点o行驶到第i段路的起点a的时间(t
i
为车辆从初始点o行驶到第i段路的起点的时间也即为车辆从初始点o行驶到第i
‑
1段路的终点的时间);t
i+1
为车辆从初始点o行驶到第i+1段路的起点b的时间(t
i+1
为车辆从初始点o行驶到第i+1段路的起点的时间也即为车辆从初始点o行驶到第i段路的终点的时间);α为oa与ab之间夹角的角度(α为相邻两段直路的夹角)。
[0097]
若路况为如图5所示为环状路连接直路路况(上段路为环状路的直路),默认环状路与直路相交时,直路与环状路的切线重合,即∠rbc=90
°
。b点为环状路与下一段直路bc的交点。r点为环状路圆心,线段rb长度等于半径r,线段or已知,∠β、∠γ已知,∠orb等于二者之和,已知三角形的两边长度和两边夹角角度,因此第三边ob、∠rbo可知。则直路bc与上一段环状路的夹角即公式中的α为∠rbo与∠rbc之和(α为相邻直路和上一段弯路的夹角)。
[0098]
如图6所示为环状路路况,通过以下公式可得位移
‑
时间曲线:
[0099][0100]
其中,r为第i段环状路圆环的半径;z为圆心;s
i
为从初始点o到车辆在第i段路上点的位移;s
i0
为从初始点o到z的距离;t
i
为车辆从初始点o行驶到第i段路的起点b的时间(t
i
为车辆从初始点o行驶到第i段路的起点的时间也即为车辆从初始点o行驶到第i
‑
1段路的终点的时间));t
i+1
为车辆从初始点o行驶到第i段路的终点的时间(t
i+1
为车辆从初始点o行驶到第i+1段路的起点的时间也即为车辆从初始点o行驶到第i段路的终点的时间);α为oz与zb夹角的角度(o为固定不变的起始点,z由该环状路确定,b为该环状路与上一段路连接的起点;当环状路确定时,与之对应的z和b也随之确定,则α也就随之确定)。
[0101]
如图7所示,当直路与多段环状路相连时,环状路可分为数段环状路(例如图7中的环状路o1、环状路o2)分别计算,从而得到不同环状路的位移
‑
时间曲线。
[0102]
得到位移
‑
时间曲线之后,再结合汽车行驶的转角
‑
时间曲线生成位移
‑
转角
‑
时间曲线,如图8所示,用位移
‑
转角
‑
时间曲线描述城市综合行驶工况。通过位移随转角的变化可反映车辆的行驶方向,反映出车辆运行中的实际信息更为全面。