一种路口预警方法及装置与流程
本发明涉及智能驾驶,更具体地说,涉及一种路口预警方法及装置。
背景技术:
1、伴随智能驾驶水平提高,各种交通环境以及应急情况的预警是保证车辆安全的核心技术。路口是典型复杂的交通环境之一,也是交通安全重点考虑场景,因此路口预警是保证车辆安全的重要手段。
2、目前多数研究采用车联网或者智能交通技术实现路口预警和辅助通行,需要特定的设备和交通基础设施要求,不是依靠车辆自身单方面来实现,较难在短时间内推广。
技术实现思路
1、有鉴于此,为解决上述问题,本发明提供一种路口预警方法及装置,技术方案如下:
2、一种路口预警方法,所述方法包括:
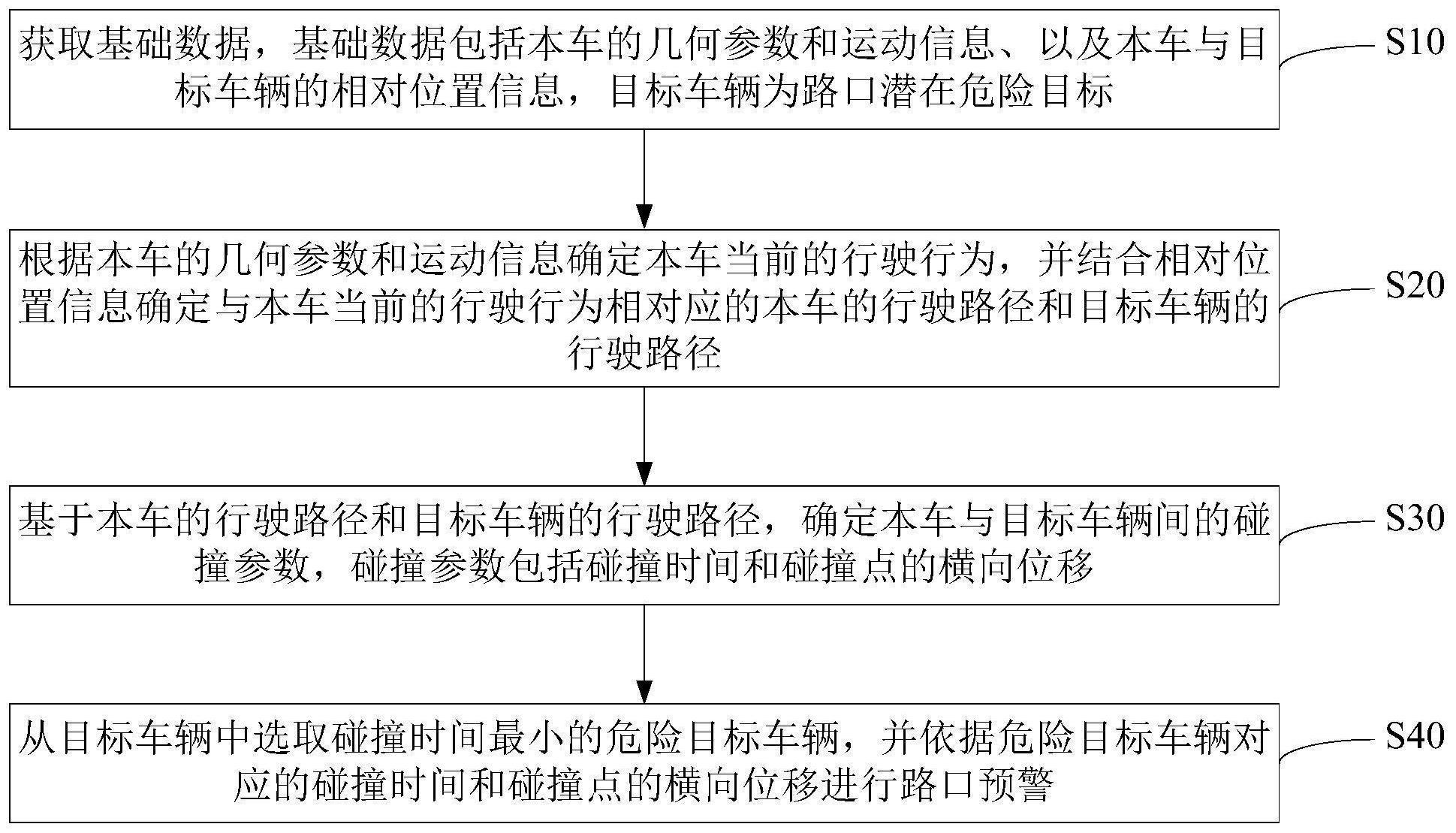
3、获取基础数据,所述基础数据包括本车的几何参数和运动信息、以及本车与目标车辆的相对位置信息,所述目标车辆为路口潜在危险目标;
4、根据本车的几何参数和运动信息确定本车当前的行驶行为,并结合所述相对位置信息确定与本车当前的行驶行为相对应的本车的行驶路径和所述目标车辆的行驶路径;
5、基于本车的行驶路径和所述目标车辆的行驶路径,确定本车与所述目标车辆间的碰撞参数,所述碰撞参数包括碰撞时间和碰撞点的横向位移;
6、从所述目标车辆中选取碰撞时间最小的危险目标车辆,并依据所述危险目标车辆对应的碰撞时间和碰撞点的横向位移进行路口预警。
7、优选的,本车的几何参数包括本车的后轴与前端距离d,本车的运动信息包括本车的车速v0、横摆角速度ω0、横摆角θ、转向角dsteer、转向角速率ωsteer;
8、所述根据本车的几何参数和运动信息确定本车当前的行驶行为,包括:
9、计算本车的曲率半径
10、如果本车的曲率半径roc大于等于对应的曲率半径阈值rlowthresh、或者本车的曲率半径roc小于所述曲率半径阈值rlowthresh且持续时间小于对应的持续时间阈值latchtime,确定本车当前的行驶行为为转弯或者直行,并调取本车上一时刻的行驶行为;
11、在本车上一时刻的行驶行为为非转弯的情况下,计算本车在固定时间t内的横向位移δy=(v0*sinθ+d*ω0*cosθ)*t;按照如下公式确定本车当前的行驶行为:
12、
13、其中,ythresh为横向位移阈值;
14、在本车上一时刻的行驶行为为转弯的情况下,按照如下公式确定本车当前的行驶行为:
15、
16、其中,换道直行和正常直行均属于直行的行驶行为。
17、优选的,所述结合所述相对位置信息确定与本车当前的行驶行为相对应的本车的行驶路径和所述目标车辆的行驶路径,包括:
18、按照如下公式确定本车的行驶路径:
19、
20、按照如下公式确定所述目标车辆i的行驶路径:
21、
22、其中,xi为所述目标车辆i在本车坐标系下的纵向位移、yi为所述目标车辆i在本车坐标系下的横向位移、ai和bi分别为所述目标车辆i为对向目标车辆时的行驶路径参数、ci和di分别为所述目标车辆i为横穿目标车辆时的行驶路径参数,ai和bi是采用最小二乘法对对向目标车辆i的多个历史位移点拟合得到的,ci和di是采用最小二乘法对横穿目标车辆i的多个历史位移点拟合得到的,所述多个历史位移点是从所属目标车辆的相对位置信息中获得的。
23、优选的,本车的运动信息还包括本车纵向加速度a(x);
24、所述基于本车的行驶路径和所述目标车辆的行驶路径,确定本车与所述目标车辆间的碰撞参数,包括:
25、按照如下公式确定本车与所述目标车辆i的碰撞点(xi,yi):
26、
27、其中,xi为本车到达碰撞点的纵向距离,yi为本车到达碰撞点的横向距离;
28、基于碰撞点(xi,yi),按照如下公式确定碰撞时间ttci:
29、
30、其中,βi为本车转弯到达碰撞点的圆心角,v0(x)为本车的车速v0在纵向上的分速度。
31、优选的,本车的几何参数还包括本车的车宽w,所述基础数据还包括所述目标车辆i的运动信息和长度li,所述目标车辆i的运动信息包括所述目标车辆i的车速vi在纵向上的分速度vi(x)、以及所述目标车辆i在纵向上的加速度ai(x),所述方法还包括:
32、按照如下公式分别计算目标车辆i的碰撞区域进入时间ti(entry)和碰撞区域离开时间ti(leave):
33、
34、其中,xi(t arg et)为目标车辆i到达碰撞点的纵向距离,xi(t arg et)可以根据目标车辆i在本车坐标系下的纵向位移、以及本车到达碰撞点的纵向距离所确定;
35、按照如下公式对碰撞时间ttci进行有效性校验:
36、
37、其中,t(buff)为预留的时间间隔。
38、优选的,所述依据所述危险目标车辆对应的碰撞时间和碰撞点的横向位移进行路口预警,包括:
39、满足如下公式时,执行路口预警:
40、
41、其中,ttcselect为所述危险目标车辆对应的碰撞时间,ttcthreshold为预警触发的碰撞时间阈值,y0为本车的横向位移,yavail为预警触发的横向可用空间、且yavail=|ycollision|-ybrake-ythreshold,ycollision为所述危险目标车辆对应的碰撞点的横向位移,ybrake为假定本车以0.6g减速度刹车到静止的横向移动距离,ythreshold为预警触发的横向位移阈值。
42、一种路口预警装置,所述装置包括:
43、数据获取模块,用于获取基础数据,所述基础数据包括本车的几何参数和运动信息、以及本车与目标车辆的相对位置信息,所述目标车辆为路口潜在危险目标;
44、路径确定模块,用于根据本车的几何参数和运动信息确定本车当前的行驶行为,并结合所述相对位置信息确定与本车当前的行驶行为相对应的本车的行驶路径和所述目标车辆的行驶路径;
45、参数确定模块,用于基于本车的行驶路径和所述目标车辆的行驶路径,确定本车与所述目标车辆间的碰撞参数,所述碰撞参数包括碰撞时间和碰撞点的横向位移;
46、路口预警模块,用于从所述目标车辆中选取碰撞时间最小的危险目标车辆,并依据所述危险目标车辆对应的碰撞时间和碰撞点的横向位移进行路口预警。
47、优选的,本车的几何参数包括本车的后轴与前端距离d,本车的运动信息包括本车的车速v0、横摆角速度ω0、横摆角θ、转向角dsteer、转向角速率ωsteer;
48、用于根据本车的几何参数和运动信息确定本车当前的行驶行为的所述路径确定模块,具体用于:
49、计算本车的曲率半径
50、如果本车的曲率半径roc大于等于对应的曲率半径阈值rlowthresh、或者本车的曲率半径roc小于所述曲率半径阈值rlowthresh且持续时间小于对应的持续时间阈值latchtime,确定本车当前的行驶行为为转弯或者直行,并调取本车上一时刻的行驶行为;
51、在本车上一时刻的行驶行为为非转弯的情况下,计算本车在固定时间t内的横向位移δy=(v0*sinθ+d*ω0*cosθ)*t;按照如下公式确定本车当前的行驶行为:
52、
53、其中,ythresh为横向位移阈值;
54、在本车上一时刻的行驶行为为转弯的情况下,按照如下公式确定本车当前的行驶行为:
55、
56、其中,换道直行和正常直行均属于直行的行驶行为。
57、优选的,用于结合所述相对位置信息确定与本车当前的行驶行为相对应的本车的行驶路径和所述目标车辆的行驶路径的所述路径确定模块,具体用于:
58、按照如下公式确定本车的行驶路径:
59、
60、按照如下公式确定所述目标车辆i的行驶路径:
61、
62、其中,xi为所述目标车辆i在本车坐标系下的纵向位移、yi为所述目标车辆i在本车坐标系下的横向位移、ai和bi分别为所述目标车辆i为对向目标车辆时的行驶路径参数、ci和di分别为所述目标车辆i为横穿目标车辆时的行驶路径参数,ai和bi是采用最小二乘法对对向目标车辆i的多个历史位移点拟合得到的,ci和di是采用最小二乘法对横穿目标车辆i的多个历史位移点拟合得到的,所述多个历史位移点是从所属目标车辆的相对位置信息中获得的。
63、优选的,本车的运动信息还包括本车纵向加速度a(x);
64、用于基于本车的行驶路径和所述目标车辆的行驶路径,确定本车与所述目标车辆间的碰撞参数的所述参数确定模块,具体用于:
65、按照如下公式确定本车与所述目标车辆i的碰撞点(xi,yi):
66、
67、其中,xi为本车到达碰撞点的纵向距离,yi为本车到达碰撞点的横向距离;
68、基于碰撞点(xi,yi),按照如下公式确定碰撞时间ttci:
69、
70、其中,βi为本车转弯到达碰撞点的圆心角,v0(x)为本车的车速v0在纵向上的分速度。
71、相较于现有技术,本发明实现的有益效果为:
72、本发明提供一种路口预警方法及装置,首先获取基础数据,该基础数据中包括本车的几何参数和运动信息、以及本车与作为路口潜在危险目标的目标车辆的相对位置信息,进而基于本车的几何参数和运动信息确定本车当前的行驶行为,并结合相对位置信息确定与本车当前的行驶行为相对应的本车的行驶路径和目标车辆的行驶路径,进一步基于本车的行驶路径和目标车辆的行驶路径确定本车与目标车辆间的碰撞参数,该碰撞参数包括碰撞时间和碰撞点的横向位移,最后从目标车辆中选择碰撞时间最小的危险目标车辆,并依据危险目标车辆对应的碰撞时间和碰撞点的横向位移进行路口预警。基于本发明,能够基于车辆实时行为进行路口预警,通过判断车辆宏观行驶行为即可实时确定路口风险,将复杂场景的分析研究简单化。
- 还没有人留言评论。精彩留言会获得点赞!