一种在隧道运营中实现高温车辆轨迹跟踪的方法及系统与流程
1.本发明涉及高速智能交通的技术领域,尤其涉及一种在隧道运营中实现高温车辆轨迹跟踪的方法及系统。
背景技术:
2.高速公路上的隧道是个空间结构特殊的实体,车辆在其中发生事故,尤其是火灾事故,会严重影响人民群众的生命安全和高速公路的通行效率。因此出现了各种隧道高温车辆预警装置和系统,有些是在隧道口进行高温预警有些是在隧道中进行车辆停车的检测,都没办法对高温车辆在隧道中的整个运行轨迹进行跟踪,来处理高温车辆可能出现的各种复杂情况。
3.现有的高温车辆检测技术有红外测温仪和视频分析技术,但这2种技术都有相应的缺点,红外测温仪能测量车辆的温度,产生高温告警,但没法分析车辆特征,没办法对当前高温车辆进行轨迹跟踪,视频分析技术可以跟踪车辆运行轨迹,但没法检测车辆温度。这些技术都是属于设备的单点工作,没法把检测高温车辆的温度和车辆信息进行融合,而采用视频分析技术也比较依赖摄像头在隧道的部署密度,如果高温车辆停在了摄像头覆盖不了的地方,则可能会产生严重的事故。
4.针对现有技术问题,本发明提供了一种在隧道运营中实现高温车辆轨迹跟踪的方法及系统。
技术实现要素:
5.本发明的目的是针对现有技术的缺陷,提供了一种在隧道运营中实现高温车辆轨迹跟踪的方法及系统。
6.为了实现以上目的,本发明采用以下技术方案:
7.一种在隧道运营中实现高温车辆轨迹跟踪的方法,包括:
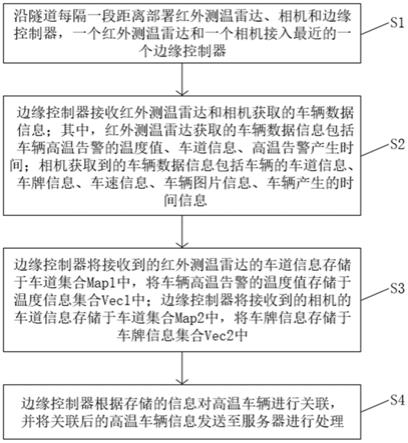
8.s1.沿隧道每隔一段距离部署红外测温雷达、相机和边缘控制器,一个红外测温雷达和一个相机接入最近的一个边缘控制器;
9.s2.边缘控制器接收红外测温雷达和相机获取的车辆数据信息;其中,红外测温雷达获取的车辆数据信息包括车辆高温告警的温度值、车道信息、高温告警产生时间;相机获取到的车辆数据信息包括车辆的车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息;
10.s3.边缘控制器将接收到的红外测温雷达的车道信息存储于车道集合map1中,将车辆高温告警的温度值存储于温度信息集合vec1中;边缘控制器将接收到的相机的车道信息存储于车道集合map2中,将车牌信息存储于车牌信息集合vec2中;
11.s4.边缘控制器根据存储的信息对高温车辆进行关联,并将关联后的高温车辆信息发送至服务器进行处理。
12.进一步的,所述步骤s2之前还包括:
13.预先设置红外测温雷达的车辆高温报警阈值以及车辆的车道信息。
14.进一步的,所述步骤s4具体为:
15.s41.判断map1和map2中是否存在车道信息,若否,则继续执行步骤s41;若是,则执行步骤s42;
16.s42.判断map1和map2中的车道信息是否存在同一车道信息,如否,则执行步骤s41;若是,则执行步骤s43;
17.s43.判断vec1和vec2中是否存在处于同一车道的温度信息和车牌信息,若否,则执行步骤s41;若是,则执行步骤s44;
18.s44.获取vec1中的温度信息t1;遍历vec2中的车牌信息p1-pn,若vec2中只有一个车牌信息ph,则把温度信息t1与车牌信息ph进行关联;若vec2中存在多个车牌信息,则判断温度信息t1的产生时间减去车牌信息pk的产生时间是否小于温度信息t1的产生时间减去车牌信息pm的产生时间,若是,则将温度信息t1与车牌信息pk进行关联;如否,则将温度信息t1与车牌信息pm进行关联,并将关联后的温度信息和车牌信息发送至服务器以及相邻的边缘控制器,其中相邻的边缘控制器为与汽车行驶方相同的下一个边缘控制器。
19.进一步的,所述步骤s4之后还包括:
20.s5.相邻的边缘控制器判断在一定时间内检测到当前车辆通过,若否,则生成高温车辆丢失告警信息,并发送至服务器进行处理。
21.进一步的,所述步骤s5中的一定时间t表示为:
22.t=l/s*120%
23.其中,l表示当前边缘控制器与相邻边缘控制器之间的距离;s表示当前车辆的车速信息。
24.相应的,还提供一种在隧道运营中实现高温车辆轨迹跟踪的系统,包括:
25.部署模块,用于沿隧道每隔一段距离部署红外测温雷达、相机和边缘控制器,一个红外测温雷达和一个相机接入最近的一个边缘控制器;
26.接收模块,用于边缘控制器接收红外测温雷达和相机获取的车辆数据信息;其中,红外测温雷达获取的车辆数据信息包括车辆高温告警的温度值、车道信息、高温告警产生时间;相机获取到的车辆数据信息包括车辆的车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息;
27.存储模块,用于边缘控制器将接收到的红外测温雷达的车道信息存储于车道集合map1中,将车辆高温告警的温度值存储于温度信息集合vec1中;边缘控制器将接收到的相机的车道信息存储于车道集合map2中,将车牌信息存储于车牌信息集合vec2中;
28.关联模块,用于边缘控制器根据存储的信息对高温车辆进行关联,并将关联后的高温车辆信息发送至服务器进行处理。
29.进一步的,还包括:
30.预设模块,用于预先设置红外测温雷达的车辆高温报警阈值以及车辆的车道信息。
31.进一步的,所述关联模块包括:
32.第一判断模块,用于判断map1和map2中是否存在车道信息;
33.第二判断模块,用于判断map1和map2中的车道信息是否存在同一车道信息;
34.第三判断模块,用于判断vec1和vec2中是否存在处于同一车道的温度信息和车牌信息;
35.获取模块,用于获取vec1中的温度信息t1;遍历vec2中的车牌信息p1-pn,若vec2中只有一个车牌信息ph,则把温度信息t1与车牌信息ph进行关联;若vec2中存在多个车牌信息,则判断温度信息t1的产生时间减去车牌信息pk的产生时间是否小于温度信息t1的产生时间减去车牌信息pm的产生时间,若是,则将温度信息t1与车牌信息pk进行关联;如否,则将温度信息t1与车牌信息pm进行关联,并将关联后的温度信息和车牌信息发送至服务器以及相邻的边缘控制器,其中相邻的边缘控制器为与汽车行驶方相同的下一个边缘控制器。
36.进一步的,还包括:
37.第四判断模块,用于相邻的边缘控制器判断在一定时间内检测到当前车辆通过。
38.进一步的,所述第四判断模块中的一定时间t表示为:
39.t=l/s*120%
40.其中,l表示当前边缘控制器与相邻边缘控制器之间的距离;s表示当前车辆的车速信息。
41.与现有技术相比,本发明具有以下有益效果:
42.1.解决了高速公路监控中高温车辆温度和车牌信息的融合问题;
43.2.解决了隧道内监控无法全部覆盖造成高温车辆丢失的问题。
附图说明
44.图1是本实施例一提供的最小边缘计算单元构建示意图;
45.图2是本实施例一提供的一种在隧道运营中实现高温车辆轨迹跟踪的方法流程图。
具体实施方式
46.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
47.本发明的目的是针对现有技术的缺陷,提供了一种在隧道运营中实现高温车辆轨迹跟踪的方法及系统。
48.实施例一
49.本实施例提供一种在隧道运营中实现高温车辆轨迹跟踪的方法,如图1-2所示,包括:
50.s1.沿隧道每隔一段距离部署红外测温雷达、相机和边缘控制器,一个红外测温雷达和一个相机接入最近的一个边缘控制器;
51.s2.边缘控制器接收红外测温雷达和相机获取的车辆数据信息;其中,红外测温雷达获取的车辆数据信息包括车辆高温告警的温度值、车道信息、高温告警产生时间;相机获
取到的车辆数据信息包括车辆的车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息;
52.s3.边缘控制器将接收到的红外测温雷达的车道信息存储于车道集合map1中,将车辆高温告警的温度值存储于温度信息集合vec1中;边缘控制器将接收到的相机的车道信息存储于车道集合map2中,将车牌信息存储于车牌信息集合vec2中;
53.s4.边缘控制器根据存储的信息对高温车辆进行关联,并将关联后的高温车辆信息发送至服务器进行处理。
54.在步骤s1中,沿隧道每隔一段距离部署红外测温雷达、相机和边缘控制器,一个红外测温雷达和一个相机接入最近的一个边缘控制器。
55.沿隧道每隔一段距离(如每隔150米)部署一组获取数据的设备以及一个边缘控制器,其中一组获取数据的设备为一个红外测温雷达和一个智能抓拍用的相机,且按照桩号将一组红外测温雷达和相机接入就近的一个边缘控制器。
56.按边缘控制器在隧道中的桩号kxxx+xxx进行排序,并确定上下游的控制器,上下游是指车辆行驶方向相同的位置。
57.在本实施例中,步骤s2之前还包括:
58.预先设置红外测温雷达的车辆高温报警阈值以及车辆的车道信息。
59.在步骤s2中,边缘控制器接收红外测温雷达和相机获取的车辆数据信息;其中,红外测温雷达获取的车辆数据信息包括车辆高温告警的温度值、车道信息、高温告警产生时间;相机获取到的车辆数据信息包括车辆的车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息。
60.红外测温雷达开始检测,当检测到车辆温度高于报警阈值时,产生高温告警,信息包括车道信息、温度值、高温告警产生时间,并将获取到的信息上传到边缘控制器。
61.当有车辆经过时,智能抓拍相机开始抓拍,产生车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息,并将获取的信息上传到边缘控制器。
62.在步骤s3中,边缘控制器将接收到的红外测温雷达的车道信息存储于车道集合map1中,将车辆高温告警的温度值存储于温度信息集合vec1中;边缘控制器将接收到的相机的车道信息存储于车道集合map2中,将车牌信息存储于车牌信息集合vec2中。
63.边缘控制器接收到红外测温雷达高温数据,包括车道数据、温度值和产生时间,将车道信息存储于车道集合map1中,将温度值存储于温度信息集合vec1中。
64.边缘控制器接收到相机的车辆数据,包括车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息,将车道信息存储于车道集合map2中,将车牌信息存储于车牌信息集合vec2中。
65.在步骤s4中,边缘控制器根据存储的信息对高温车辆进行关联,并将关联后的高温车辆信息发送至服务器进行处理。
66.边缘控制器进行高温车辆数据关联,具体为:
67.s41.判断map1和map2中是否存在车道信息,若否,则继续执行步骤s41;若是,则执行步骤s42;
68.s42.判断map1和map2中的车道信息是否存在同一车道信息,如否,则执行步骤s41;若是,则执行步骤s43;
69.s43.判断vec1和vec2中是否存在处于同一车道的数据,若否,则执行步骤s41;若是,则执行步骤s44;其中数据为vec1中的温度信息和vec2中的车牌信息;
70.s44.获取vec1中的温度信息t1;遍历vec2中的车牌信息p1-pn,若vec2中只有一个车牌信息ph,则把温度信息t1与车牌信息ph进行关联;若vec2中存在多个车牌信息,则判断温度信息t1的产生时间减去车牌信息pk的产生时间是否小于温度信息t1的产生时间减去车牌信息pm的产生时间,若是,则将温度信息t1与车牌信息pk进行关联;如否,则将温度信息t1与车牌信息pm进行关联,并将关联后的温度信息和车牌信息发送至服务器以及相邻的边缘控制器,其中相邻的边缘控制器为与汽车行驶方相同的下一个边缘控制器。
71.在本实施例中,红外测温雷达只要获取到一个高温车辆的信息就会进行执行,设当前获取到的温度值为t1,此时同样会得到当前车辆所处的车道信息以及获取到温度值的时间。
72.在车牌信息集合vec2中可能存在同一车道的一个或多个车牌信息,若有且只有一个,则表示当前车辆即为高温车辆,将温度信息与车牌信息进行关联。若存在多个车牌信息,则需要对每个车牌信息产生的时间与温度信息产生的时间进行比较,筛选出最接近温度信息产生时间的车牌信息,则筛选出的车牌信息对应的车辆即为高温车辆,将温度信息与车牌信息进行关联。
73.在本实施例中,计算最接近的时间的方式具体说明:
74.若当前vec2中存在同一车道的车牌信息有pk、pm;
75.将温度信息t1的产生时间减去车牌信息pk的产生时间,得到第一时间差值;将温度信息t1的产生时间减去车牌信息pm的产生时间,得到第二时间差值;判断第一时间查差值否小于第二时间差值,若是,则将温度信息t1与车牌信息pk进行关联;如否,则将温度信息t1与车牌信息pm进行关联。
76.需要说明的是,若vec2中存在的同一车道的车牌信息为多个,则均采用上述方法计算时间差值,并对时间差值进行比较,将最接近温度信息的时间相对应的车辆定为最终获取的车辆。
77.在本实施例中,将关联后的信息发送至服务器中,以便工作人员进行及时处理,可以快速告知驾驶员或者派人员进行合理。
78.关联后的信息还会发送至相邻的边缘控制器,即与车辆方向相同的下游边缘控制器中。
79.在本实施例中,步骤s4之后还包括:
80.s5.相邻的边缘控制器判断在一定时间内检测到当前车辆通过,若否,则生成高温车辆丢失告警信息,并发送至服务器进行处理。
81.下游边缘控制器收到上游边缘控制器(即当前的边缘控制器)发送的信息后,根据两个控制器的距离l和车速s,计算应当通过的时间t1=l/s。
82.在实际情况中,车辆在行驶过程中可能会出现偏差,为了更加接近实际情况,则留出偏差时间,则最终应该通过的时间t表示为:
83.t=l/s*120%
84.其中,l表示当前边缘控制器与相邻边缘控制器之间的距离;s表示当前车辆的车速信息。
85.如两个控制器的距离为150米,当前车辆的车速为60km/h,则:
86.t=l/s*120%=(150*3600)/(60*1000)*120%=11s
87.如果下游边缘控制器在11秒内未检测到该车辆通过,则表示当前车辆出现故障,产生高温车辆丢失告警。
88.与现有技术相比,本实施例具有以下有益效果:
89.1.解决了高速公路监控中高温车辆温度和车牌信息的融合问题;
90.2.解决了隧道内监控无法全部覆盖造成高温车辆丢失的问题。
91.实施例二
92.本实施例提供一种在隧道运营中实现高温车辆轨迹跟踪的系统,包括:
93.部署模块,用于沿隧道每隔一段距离部署红外测温雷达、相机和边缘控制器,一个红外测温雷达和一个相机接入最近的一个边缘控制器;
94.接收模块,用于边缘控制器接收红外测温雷达和相机获取的车辆数据信息;其中,红外测温雷达获取的车辆数据信息包括车辆高温告警的温度值、车道信息、高温告警产生时间;相机获取到的车辆数据信息包括车辆的车道信息、车牌信息、车速信息、车辆图片信息、车辆产生的时间信息;
95.存储模块,用于边缘控制器将接收到的红外测温雷达的车道信息存储于车道集合map1中,将车辆高温告警的温度值存储于温度信息集合vec1中;边缘控制器将接收到的相机的车道信息存储于车道集合map2中,将车牌信息存储于车牌信息集合vec2中;
96.关联模块,用于边缘控制器根据存储的信息对高温车辆进行关联,并将关联后的高温车辆信息发送至服务器进行处理。
97.进一步的,还包括:
98.预设模块,用于预先设置红外测温雷达的车辆高温报警阈值以及车辆的车道信息。
99.进一步的,所述关联模块包括:
100.第一判断模块,用于判断map1和map2中是否存在车道信息;
101.第二判断模块,用于判断map1和map2中的车道信息是否存在同一车道信息;
102.第三判断模块,用于判断vec1和vec2中是否存在处于同一车道的温度信息和车牌信息;
103.获取模块,用于获取vec1中的温度信息t1;遍历vec2中的车牌信息p1-pn,若vec2中只有一个车牌信息ph,则把温度信息t1与车牌信息ph进行关联;若vec2中存在多个车牌信息,则判断温度信息t1的产生时间减去车牌信息pk的产生时间是否小于温度信息t1的产生时间减去车牌信息pm的产生时间,若是,则将温度信息t1与车牌信息pk进行关联;如否,则将温度信息t1与车牌信息pm进行关联,并将关联后的温度信息和车牌信息发送至服务器以及相邻的边缘控制器,其中相邻的边缘控制器为与汽车行驶方相同的下一个边缘控制器。
104.进一步的,还包括:
105.第四判断模块,用于相邻的边缘控制器判断在一定时间内检测到当前车辆通过。
106.进一步的,所述第四判断模块中的一定时间t表示为:
107.t=l/s*120%
108.其中,l表示当前边缘控制器与相邻边缘控制器之间的距离;s表示当前车辆的车速信息。
109.需要说明的是,本实施例提供的一种在隧道运营中实现高温车辆轨迹跟踪的系统与实施例一类似,在此不多作赘述。
110.与现有技术相比,本实施例具有以下有益效果:
111.1.解决了高速公路监控中高温车辆温度和车牌信息的融合问题;
112.2.解决了隧道内监控无法全部覆盖造成高温车辆丢失的问题。
113.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1