交通控制方法、装置、介质及程序产品与流程
1.本公开涉及计算机领域,具体涉及深度学习和智能交通,尤其涉及一种交通控制方法、装置、介质及程序产品。
背景技术:
2.在其他交通参与者和机动车辆共同参与的交通场景中,亟需一种控制其他交通参与者和机动车辆的交通行为的方法。
3.目前,利用以下几种方式实现对其他交通参与者和机动车的交通行为进行控制:
4.(1)基于交通法规;(2)基于交通辅助设施,如其他交通参与者在通过路口时,通过路侧红绿灯按键等交通辅助设施,改变路口红绿灯状态,并基于交通法规通过路口。
技术实现要素:
5.本公开实施例提出了一种交通控制方法、装置、介质及程序产品。
6.第一方面,本公开实施例提出了一种交通控制方法,包括:获取其他交通参与者的意图信息和第一交通业务信息;向计算设备发送其他交通参与者的意图信息和第一交通业务信息;接收计算设备发送的第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
7.第二方面,本公开实施例提出了一种交通控制方法,包括:接收子系统发送的其他交通参与者的意图信息和第一交通业务信息;将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;根据其他交通参与者的意图信息和目标车辆的意图信息,生成第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶;向出行者子系统发送第一交通行驶策略。
8.第三方面,本公开实施例提出了一种交通控制装置,包括:信息获取模块,被配置成获取其他交通参与者的意图信息和第一交通业务信息;信息发送模块,被配置成向计算设备发送其他交通参与者的意图信息和第一交通业务信息;策略接收模块,被配置成接收计算设备发送的第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
9.第四方面,本公开实施例提出了一种交通控制装置,包括:信息接收模块,被配置成接收出行者子系统发送的其他交通参与者的意图信息和第一交通业务信息;意图得到模块,被配置成将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;策略生成模块,被配置成根据其他交通参与者的意图信息和目标车辆的意图信息,生成第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶;策略发送模块,被配置成向出行者子系统发送第一交通行驶策略。
10.第五方面,本公开实施例提出了一种出行者子系统,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指
令,指令被至少一个处理器执行,以使至少一个处理器能够执行如第一方面描述的方法。
11.第六方面,本公开实施例提出了一种车载子系统,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行如第二方面描述的方法。
12.第七方面,本公开实施例提出了一种路侧感知系统,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行如第二方面描述的方法。
13.第八方面,本公开实施例提出了一种交通控制系统,包括:上述的出行者子系统和车载子系统。
14.第九方面,本公开实施例提出了一种存储有计算机指令的非瞬时计算机可读存储介质,计算机指令用于使计算机执行如第一方面或第二方面描述的方法。
15.第十方面,本公开实施例提出了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现如第一方面或第二方面描述的方法。
16.本公开实施例提供的交通控制方法、装置、介质及程序产品,首先获取其他交通参与者的意图信息和第一交通业务信息;然后向计算设备发送其他交通参与者的意图信息和第一交通业务信息;最后接收计算设备发送的第一交通行驶策略,其该第一交通行驶策略可以同于控制其他交通参与者按照第一交通业务信息继续行驶。能够根据出行者子系统上报的意图信息,为其制定对应的第一交通行驶策略,以实现对其他交通参与者和目标车辆的交通行为进行控制,从而加强了对交通行为的管制。
17.应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
18.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本公开的其它特征、目的和优点将会变得更明显。附图用于更好地理解本方案,不构成对本公开的限定。其中:
19.图1是本公开可以应用于其中的示例性系统架构图;
20.图2是根据本公开的交通控制方法的一个实施例的流程图;
21.图3是根据本公开的交通控制方法的一个实施例的流程图;
22.图4是根据本公开的交通控制方法的一个实施例的流程图;
23.图5是根据本公开的交通控制方法的一个应用场景的示意图;
24.图6是根据本公开的交通控制系统的一个实施例的结构示意图;
25.图7是根据本公开的交通控制装置的一个实施例的结构示意图;
26.图8是根据本公开的交通控制装置的一个实施例的结构示意图;
27.图9是用来实现本公开实施例的电子设备的框图。
具体实施方式
28.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识
到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
29.需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
30.图1示出了可以应用本公开的交通控制方法或交通控制装置的实施例的示例性系统架构100。
31.如图1所示,系统架构100可以包括出行者子系统101,网络102和计算设备103。网络102用以在出行者子系统101和计算设备103之间提供通信链路的介质。网络102可以包括各种连接类型,例如有线、无线通信链路或者光纤电缆等等。
32.出行者子系统101上可以安装有各种客户端应用、智能交互应用,例如导航应用、地图应用等等。
33.出行者子系统101可以获取其他交通参与者的意图信息和第一交通业务信息;向计算设备发送其他交通参与者的意图信息和第一交通业务信息;接收计算设备发送的第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
34.出行者子系统101可以是硬件,也可以是软件。当出行者子系统101为硬件时,出行者子系统可以为与用户通过键盘、触摸板、触摸屏、遥控器、语音交互或手写设备等一种或多种方式进行人机交互的电子产品,例如pc(personal computer,个人计算机)、手机、智能手机、pda(personal digital assistant,个人数字助手)、可穿戴设备、ppc(pocket pc,掌上电脑)、平板电脑、智能车机、智能电视、智能音箱、平板电脑、膝上型便携计算机和台式计算机等等;出行者子系统可以为具备通信功能的非机动车。当出行者子系统101为软件时,其可以实现成多个软件或软件模块,也可以实现成单个软件或软件模块。在此不做具体限定。
35.计算设备103可以是硬件,也可以是软件。
36.需要说明的是,本公开实施例所提供的交通控制方法一般由出行者子系统101执行,相应地,交通控制装置一般设置于出行者子系统101中。
37.应该理解,图1中的出行者子系统、网络和计算设备的数目仅仅是示意性的。根据实现需要,可以具有任意数目的出行者子系统、网络和计算设备。
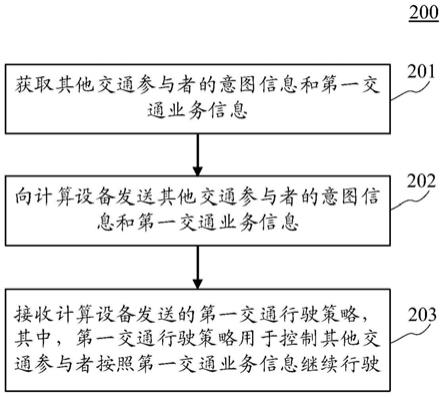
38.继续参考图2,其示出了根据本公开的交通控制方法的一个实施例的流程200。该交通控制方法可以包括以下步骤:
39.步骤201,获取其他交通参与者的意图信息和第一交通业务信息。
40.在本实施例中,交通控制方法的执行主体(例如图1所示的出行者子系统101)可以获取其他交通参与者的意图信息和第一交通业务信息。上述其他交通参与者可以为交通参与者中除机动车之外的参与者,例如,自行车的骑行者、行人等。上述意图信息可以用于表征其他交通参与者的预实施的交通行为,例如,需要过道路等。上述第一交通业务信息可以用于描述其他交通参与者与交通相关的事件或状态。
41.在本实施例中,获取其他交通参与者的意图信息可以包括:接收其他交通参与者通过在出行者子系统(例如图1所示的出行者子系统101)的导航界面或地图界面上的触控按钮或输入按钮,向出行者子系统输入其他交通参与者的意图信息。
42.在一个示例中,在导航界面或地图界面上可以显示用户当前所在的位置,当其他交通参与者需要过道路时,用户可以在该道路处的触控按钮(例如,直行的按钮)进行操作,以使出行者子系统获取其他交通参与者的意图信息。
43.在一个示例中,上述输入按钮可以为语音输入按钮或文本输入按钮,在其他交通参与者操作该语音输入按钮或文本输入按钮之后,可以获取其他交通参与者输入的语音或文本,以使出行者子系统获取其他交通参与者的意图信息。
44.需要说明的是,该触控按钮可以为与导航界面或地图界面上的方向引导箭头对应的按钮。
45.在本实施例中,获取其他交通参与者的第一交通业务信息可以包括:获取其他交通参与者的传感器采集的数据,以得到第一交通业务信息,例如,出行者子系统的加速度传感器、方向传感器、陀螺仪传感器、线性加速度传感器、旋转矢量传感器等。
46.本公开的技术方案中,所涉及的意图信息和第一交通业务信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
47.步骤202,向计算设备发送其他交通参与者的意图信息和第一交通业务信息。
48.在实施例中,上述执行主体可以通过网络(例如图1所示的网络102)向计算设备(例如图1所示的计算设备103)发送其他交通参与者的意图信息和第一交通业务信息。
49.步骤203,接收计算设备发送的第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
50.在本实施例中,上述执行主体可以用于接收计算设备发送的第一交通行驶策略,该第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。上述第二交通业务信息可以用于描述除其他交通参与者之外的参与者与交通相关的事件或状态,其中,例如,目标车辆、飞机、摩托车等。上述第一交通行驶策略可以用于计算设备控制其他交通参与者是否按照其的意图信息实施对应的交通行为,例如,通过目标道路等。
51.本公开实施例提供的交通控制方法,首先获取其他交通参与者的意图信息和第一交通业务信息;然后向计算设备发送其他交通参与者的意图信息和第一交通业务信息;最后接收计算设备发送的第一交通行驶策略,其该第一交通行驶策略可以同于控制其他交通参与者按照第一交通业务信息继续行驶。能够根据出行者子系统上报的意图信息,为其制定对应的第一交通行驶策略,以实现对其他交通参与者和目标车辆的交通行为进行控制,从而加强了对交通行为的管制。
52.在本实施例的一些可选的实现方式中,该交通控制方法还包括:接收计算设备发送的第二交通行驶策略,第二交通行驶策略用于控制目标车辆按照第二交通业务信息继续行驶。
53.在本实现方式中,上述执行主体可以接收计算设备发送的第二交通行驶策略,从而可以根据第二交通行驶策略对其他交通参与者和目标车辆分别进行控制,该第二交通行驶策略用于控制目标车辆按照第二交通业务信息继续行驶。
54.需要的说明的是,为了避免其他交通参与者与目标车辆之间发送碰撞,本公开实施例,在控制目标车辆按照第二交通业务信息继续行驶时,可以控制其他交通参与者不按照第一交通业务信息行驶,例如,控制其他交通参与者停止行驶或预设速度行驶。
55.在本实现方式中,能够根据出行者子系统上报的意图信息,为其制定对应的第二
交通行驶策略,以实现对其他交通参与者和目标车辆的交通行为进行控制,从而加强了对交通行为的管制。
56.在本实施例的一些可选的实现方式中,该交通控制方法还包括:接收计算设备发送的第三交通行驶策略,第三交通行驶策略用于控制目标车辆按照第三交通业务信息行驶和控制其他交通参与者按照第四交通业务信息行驶。
57.在本实现方式中,上述执行主体可以接收计算设备发送的第三交通行驶策略,该第三交通行驶策略可以用于控制目标车辆按照第三交通业务信息行驶和控制其他交通参与者按照第四交通业务信息行驶。
58.需要的说明的是,为了避免其他交通参与者与目标车辆之间发送碰撞,本公开实施例,上述执行主体可以通过预设的算法模型通过其他交通参与者的第一交通业务信息和目标车辆的第二交通业务信息,确定第三交通行驶策略,以通过协商的方式给其他交通参与者和目标车辆制定对应的交通业务信息。
59.在一个示例中,根据目标车辆和其他交通参与者的运行速度,以及目标车辆与其他交通参与者之间的相对距离,确定目标车辆和其他交通参与者可能出行碰撞的位置点,接着调整其他交通参与者和目标车辆的交通业务信息,以使其他交通参与者和目标车辆不发生碰撞,还能处于运行的状态。
60.在本实现方式中,通过第三交通行驶策略,可以控制目标车辆按照第三交通业务信息和控制其他交通参与者按照第四交通业务信息运行,以避免因中断运行造成的交通堵塞。
61.在本实施例的一些可选的实现方式中,第一交通业务信息包括以下至少一项:其他交通参与者基础信息、其他交通参与者动力信息、其他交通参与者附属物信息。
62.在本实现方式中,第一交通业务信息可以包括其他交通参与者的基础信息、其他交通参与者动力信息和其他交通参与者附属物信息。上述其他交通参与者的基础信息可以包括其他交通参与者身份信息、非机动(例如,自行车)结构参数信息,非机动车维护信息等。上述其他交通参与者动力信息可以包括其他交通参与者的行驶速度、加速度等。上述其他交通参与者附属物信息可以包括类型和内容。
63.需要说明的是,为了能够指定更符合交通运行的第一交通业务信息,该第一交通业务信息还可以包括:其他交通参与者拓展信息,该其他交通参与者拓展信息用于补充额外的信息,例如其他交通参与者的身份信息。
64.在本实现方式中,可以从多维获取第一交通业务信息,从而可以为其他交通参与者和目标车辆制定更优的交通行驶策略。
65.进一步参考图3,图3示出了根据本公开的交通控制方法的一个实施例的流程300。该交通控制方法可以包括以下步骤:
66.步骤301,接收出行者子系统发送的其他交通参与者的意图信息和第一交通业务信息。
67.在本实施例中,交通控制方法的执行主体(例如图1所示的计算设备103)可以通过网络(例如图1所示的网络102)接收出行者子系统发送的其他交通参与者的意图信息和第一交通业务信息。上述其他交通参与者可以为交通参与者中除机动车之外的参与者,例如,自行车的骑行者、行人等。上述意图信息可以用于表征其他交通参与者的预实施的交通行
为,例如,需要过道路等。上述第一交通业务信息可以用于描述其他交通参与者与交通相关的事件或状态。
68.在本实施例中,获取其他交通参与者的意图信息可以包括:接收其他交通参与者通过在出行者子系统(例如图1所示的出行者子系统101)的导航界面或地图界面上的触控按钮或输入按钮,向出行者子系统输入其他交通参与者的意图信息。
69.在一个示例中,在导航界面或地图界面上可以显示用户当前所在的位置,当其他交通参与者需要过道路时,用户可以在该道路处的触控按钮(例如,直行的按钮)进行操作,以使出行者子系统获取其他交通参与者的意图信息。
70.在一个示例中,上述输入按钮可以为语音输入按钮或文本输入按钮,在其他交通参与者操作该语音输入按钮或文本输入按钮之后,可以获取其他交通参与者输入的语音或文本,以使出行者子系统获取其他交通参与者的意图信息。
71.需要说明的是,该触控按钮可以为与导航界面或地图界面上的方向引导箭头对应的按钮。
72.在本实施例中,获取其他交通参与者的第一交通业务信息可以包括:获取其他交通参与者的传感器采集的数据,以得到第一交通业务信息,例如,出行者子系统的加速度传感器、方向传感器、陀螺仪传感器、线性加速度传感器、旋转矢量传感器等。
73.本公开的技术方案中,所涉及的意图信息和第一交通业务信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
74.步骤302,将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息。
75.在本实施例中,上述执行主体可以将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,以得到目标车辆的行为分类,并根据目标车辆的行为分类,确定目标车辆的意图信息。
76.在这里,意图识别模型可以基于以下步骤确定:获取目标车辆的交通行为特征和对应的行为类别标签,该行为类别标签可以用于表征目标车辆的意图信息;之后,利用目标车辆的交通行为特征和对应的行为类别标签进行训练,以得到意图识别模型。在训练时,执行主体可以将目标车辆的交通行为特征作为意图识别模型的输入,以及将目标车辆的交通行为特征对应的行为类别标签作为期望输出,得到意图识别模型。上述机器学习模型可以为现有技术或未来发展技术中的概率模型、分类模型或者其他分类器等,例如,机器学习模型可以包括以下任意一项:决策树模型(xgboost)、逻辑回归模型(lr)、深度神经网络模型(dnn)。
77.需要说明的是,上述交通行为特征可以用于表征目标车辆的交通行为,例如,按照30km/h的速度运行。
78.在本实施例中,在将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息之前,该交通控制方法还包括:
79.获取计算设备中的各个传感器采集的数据,以得到目标车辆的第二交通业务信息。上述第二交通业务信息可以用于描述目标车辆与交通相关的事件或状态,其中,机动车可以包括目标车辆、飞机、摩托车等。
80.在本实施例中,计算设备的各个传感器可以包括:进气压力传感器、空气流量计、
有车速传感器、温度传感器、轴转速传感器、压力传感器等,方向器有转角传感器、转矩传感器、液压传感器、车速传感器、加速度传感器、车身高度传感器、侧倾角传感器、转角传感器等。
81.本公开的技术方案中,所涉及的第二交通业务信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
82.步骤303,根据其他交通参与者的意图信息和目标车辆的意图信息,生成第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
83.在本实施例中,上述执行主体可以根据其他交通参与者的意图信息和目标车辆的地图信息,生成第一交通行驶策略。上述第一交通行驶策略可以用于控制其他交通参与者和目标车辆待运行的方式,例如,目标车辆减速以使其他交通参与者通过该目标道路(即,通过目标道路为其他交通参与者待运行的方式)。
84.在一个示例中,该交通控制方法在执行步骤303之前还可以包括:预先建立其他交通参与者的意图信息和目标车辆的意图信息与第一交通行驶策略之间的对应关系,以备在计算设备得到目标车辆的意图信息之后,可以根据其他交通参与者的意图信息和目标车辆的意图信息,得到对应的第一交通行驶策略。
85.步骤304,向出行者子系统发送第一交通行驶策略。
86.在本实施例中,上述执行主体可以通过网络(例如图1所示的网络102)向出行者子系统发送第一交通行驶策略。
87.本公开实施例提供的交通控制方法,首先接收其他交通参与者的意图信息和第一交通业务信息;然后将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;然后根据其他交通参与者的意图信息和目标车辆的意图信息,生成第一交通行驶策略;最后向出行者子系统发送第一交通行驶策略,其该第一交通行驶策略可以同于控制其他交通参与者按照第一交通业务信息继续行驶。能够根据出行者子系统上报的意图信息,为其制定对应的第一交通行驶策略,以实现对其他交通参与者和目标车辆的交通行为进行控制,从而加强了对交通行为的管制。
88.进一步参考图4,图4示出了根据本公开的交通控制方法的一个实施例的流程400。该交通控制方法可以包括以下步骤:
89.步骤401,接收出行者子系统发送的其他交通参与者的意图信息和第一交通业务信息。
90.在本实施例中,交通控制方法的执行主体(例如图1所示的计算设备103)可以通过网络(例如图1所示的网络102)接收出行者子系统发送的其他交通参与者的意图信息和第一交通业务信息。上述其他交通参与者可以为交通参与者中除机动车之外的参与者,例如,自行车的骑行者、行人等。上述意图信息可以用于表征其他交通参与者的预实施的交通行为,例如,需要过道路等。上述第一交通业务信息可以用于描述其他交通参与者与交通相关的事件或状态。
91.本公开的技术方案中,所涉及的意图信息和第一交通业务信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
92.步骤402,将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得
到目标车辆的意图信息。
93.在本实施例中,上述执行主体可以将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,以得到目标车辆的行为分类,并根据目标车辆的行为分类,确定目标车辆的意图信息。
94.本公开的技术方案中,所涉及的第二交通业务信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
95.步骤403,根据其他交通参与者的意图信息和目标车辆的意图信息,确定意图优先级信息。
96.在本实施例中,上述执行主体可以根据其他交通参与者的意图信息和目标车辆的地图信息,确定意图优先级信息。上述意图优先级信息可以用于表征意图信息的优先级。
97.在一个示例中,该交通控制方法在执行步骤403之前还可以包括:预先建立其他交通参与者的意图信息对应的优先级和目标车辆的意图信息对应的优先级,之后,根据其他交通参与者的意图信息对应的优先级和目标车辆的意图信息对应的优先级,确定意图优先级信息。
98.需要说明的是,其他交通参与者的意图信息对应的优先级和目标车辆的意图信息对应的优先级可以基于交通礼让原则,例如,礼让行人;或基于其他交通参与者的意图信息的紧急程度和目标车辆的意图信息的紧急程度,对应的优先级。上述紧急程度可以用于表征优先待执行交通行为的程度。
99.步骤404,根据意图优先级信息,生成第一交通行驶策略。
100.在本实施例中,上述执行主体可以根据意图优先级信息,生成第一交通行驶策略。上述第一交通行驶策略可以用于控制其他交通参与者和目标车辆待运行的方式,例如,目标车辆减速以使其他交通参与者通过该目标道路(即,通过目标道路为其他交通参与者待运行的方式)。
101.在一个示例中,该交通控制方法在执行步骤404之前还可以包括:预先建立意图优先级信息与第一交通行驶策略之间的对应关系,以备在计算设备根据意图优先级信息,得到对应的第一交通行驶策略。
102.步骤405,向出行者子系统发送第一交通行驶策略。
103.在本实施例中,上述执行主体可以通过网络(例如图1所示的网络102)向出行者子系统发送第一交通行驶策略。
104.在本实施例中,步骤401、402、405的具体操作已在图3所示的实施例中步骤201、202、203进行了详细的介绍,在此不再赘述。
105.从图4中可以看出,与图3对应的实施例相比,本实施例中的交通控制方法突出了根据其他交通参与者的意图信息和目标车辆的意图信息,确定意图优先级信息;基于意图优先级信息,生成第一交通行驶策略的步骤。由此,本实施例描述的方案可以接收其他交通参与者的意图信息和第一交通业务信息;然后将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;然后根据其他交通参与者的意图信息和目标车辆的意图信息,确定意图优先级信息;然后根据意图优先级信息,生成第一交通行驶策略;最后向其子系统发送第一交通行驶策略,其该第一交通行驶策略可以同于控制其他交通参与者按照第一交通业务信息继续行驶。能够根据出行者子系统上报的意图信息,
为其制定对应的第一交通行驶策略,以实现对其他交通参与者和目标车辆的交通行为进行控制,从而加强了对交通行为的管制。
106.在本实施例的一些可选的实现方式中,根据意图优先级信息,生成第一交通行驶策略,包括:响应于其他交通参与者的意图信息对应的优先级高于目标车辆的意图信息对应的优先级,确定目标车辆是否处于第一预设区域内,其中,第一预设区域为允许目标车辆执行第一交通行驶策略的区域;响应于目标车辆处于第一预设区域内,根据意图优先级信息,生成第一交通行驶策略。
107.在本实现方式中,上述执行主体可以在其他交通参与者的意图信息对应的优先级高于目标车辆的意图信息对应的优先级时,确定目标车辆是否处于第一预设区域内,该第一预设区域为允许目标车辆执行第一交通行驶策略的区域;在目标车辆处于第一预设区域内,根据意图优先级信息,生成第一交通行驶策略。
108.在本实现方式中,上述执行主体可以通过第一预设区域来确定目标车辆能否将其第二交通业务信息调整至预设的交通业务信息,以使其他交通参与者按照第一交通业务信息继续行驶。
109.在一个示例中,预设的交通业务信息可以为目标车辆的速度为0对应的交通业务信息。
110.在本实现方式中,可以在目标车辆的优先级低于其他交通参与者的时候,通过第一预设区域来确定是否遵循第一交通行驶策略,从而可以适应多变的交通。
111.在本实施例的一些可选的实现方式中,该交通控制方法还包括:响应于目标车辆不处于第一预设区域内,生成第二交通行驶策略,其中,第二交通行驶策略用于控制目标车辆按照第二交通业务信息继续行驶;向出行者子系统发送第二交通行驶策略。
112.在本实现方式中,在目标车辆不位于第一预设区域内时,可以生成第二交通行驶策略,该第二交通行驶策略可以用于控制车辆按照第二交通业务信息继续行驶。
113.在本实现方式中,上述执行主体可以通过第一预设区域来确定目标车辆能否按照第二交通业务信息继续行驶。
114.在一个示例中,其他交通参与者停止运行。
115.在本实现方式中,在目标车辆不处于第一预设区域内时,生成对应的第二交通行驶策略,以控制目标车辆按照第二业务信息继续行驶,以实现对其他交通参与者和目标车辆的交通行为进行控制,从而加强了对交通行为的管制。
116.在本实施例的一些可选的实现方式中,该交通控制方法还包括:响应于目标车辆不处于第一预设区域内,根据第二交通业务信息和第一交通业务信息,确定第三交通行驶策略,其中,第三交通行驶策略用于控制目标车辆按照第三交通业务信息行驶和控制其他交通参与者按照第四交通业务信息行驶;向出行者子系统发送第三交通行驶策略。
117.在本实现方式中,上述执行主体可以在目标车辆不处于第一预设区域内时,根据第二交通业务信息和第一交通业务信息,确定第三交通行驶策略,该第三交通行驶策略可以用于控制目标车辆按照第三交通业务信息行驶和控制其他交通参与者按照第四交通业务信息行驶。
118.需要的说明的是,为了避免其他交通参与者与目标车辆之间发送碰撞,本公开实施例,上述执行主体可以通过预设的算法模型通过其他交通参与者的第一交通业务信息和
目标车辆的第二交通业务信息,确定第三交通行驶策略,以通过协商的方式给其他交通参与者和目标车辆制定对应的交通业务信息。
119.在一个示例中,根据目标车辆和其他交通参与者的运行速度,以及目标车辆与其他交通参与者之间的相对距离,确定目标车辆和其他交通参与者可能出行碰撞的位置点,接着调整其他交通参与者和目标车辆的交通业务信息,以使其他交通参与者和目标车辆不发生碰撞,还能处于运行的状态。
120.在本实现方式中,通过第三交通行驶策略,可以控制目标车辆按照第三交通业务信息和控制其他交通参与者按照第四交通业务信息运行,以避免因中断运行造成的交通堵塞。
121.在本实施例的一些可选的实现方式中,根据意图优先级信息,生成第一交通行驶策略,包括:
122.响应于意图优先级信息包括目标车辆的优先级低于其他交通参与者,确定目标车辆对应的协作车辆,其中,协作车辆为目标车辆的第二预设区域内的车辆;
123.生成针对目标车辆和协作车辆的第一交通行驶策略,其中,第一交通行驶策略用于指示目标车辆以第一预设幅度减速行驶和协作车辆以第二预设幅度减速行驶,第一预设幅度和第二预设幅度与意图优先级信息对应。
124.在本实现的方式中,在目标车辆的优先级低于其他交通参与者时,确定目标车辆对应的协作车辆,其中,协作车辆为目标车辆的第二预设区域内的车辆;之后,生成针对目标车辆和协作车辆的第一交通行驶策略,其中,第一交通行驶策略用于指示目标车辆以第一预设幅度减速行驶和协作车辆以第二预设幅度减速行驶,第一预设幅度和第二预设幅度与意图优先级信息对应。上述协作车辆可以为多个车辆。
125.在目标车辆的优先级低于其他交通参与者时,确定目标车辆第二预设范围内的协作车辆;之后,生成针对目标车辆和协作车辆的第一交通行驶策略,以控制目标车辆和协作车辆按照第一预设幅度减速行驶和协作车辆第二预设幅度减速,以将目标车辆的第二交通业务信息调整至预设的交通业务信息,以使其他交通参与者按照第一交通业务信息继续行驶。
126.在一个示例中,预设的交通业务信息可以为目标车辆的速度为0对应的交通业务信息。
127.需要说明的是,第一预设幅度和第二预设幅度可以根据意图优先级信息进行确定,可以预先建立第一预设幅度和第二预设幅度与意图优先级信息之间的对应关系。
128.在本实现方式中,在目标车辆的优先级低于其他交通参与者时,生成针对目标车辆和协作车辆的第一交通行驶策略,以控制目标车辆和协作车辆按照第一预设幅度减速行驶和协作车辆第二预设幅度减速,以实现对其他交通参与者、目标车辆和协作车辆的交通行为进行控制,从而加强了对交通行为的管制。
129.在本实施例的一些可选的实现方式中,第二预设区域包括在预设方向上与目标车辆之间的距离小于预设阈值的区域,预设阈值与意图优先级信息对应。
130.在本实现方式中,第二区域可以包括在预设方向上与目标车辆之间的距离小于预设阈值的区域,该预设阈值与意图优先级信息对应。
131.在这里,上述预设方向可以为目标车辆后方的盲区。上述预设阈值可以根据与意
图优先级信息之间的对应关系确定或根据交通控制精度进行设定。
132.在本实现的方式中,还可以预先建立意图优先级信息与预设阈值的对应关系。
133.在本实施例的一些可选的实现方式中,确定目标车辆对应的协作车辆,包括:将在预设方向上与目标车辆之间的距离最小的预设个车辆,确定为目标车辆对应的协作车辆。
134.在本实现方式中,上述执行主体确定目标车辆对应的协作车辆可以包括:将在预设方向上于目标车辆之间的距离最小的预设个车辆,确定为目标车辆对应的协作车辆。
135.在这里,上述预设方向可以为目标车辆后方的盲区。
136.在本实施例的一些可选的实现方式中,第二交通业务信息包括以下至少一项:车辆基础信息、车辆动力信息、车辆附属物信息。
137.在本实现方式中,第二交通业务信息可以包括车辆的基础信息、车辆动力信息和车辆附属物信息。上述车辆的基础信息可以包括车辆身份信息、非机动(例如,自行车)结构参数信息,非机动车维护信息等。上述车辆动力信息可以包括车辆的行驶速度、加速度等。上述车辆附属物信息可以包括类型和内容。
138.需要说明的是,为了能够指定更符合交通运行的第二交通业务信息,该第二交通业务信息还可以包括:车辆拓展信息,该车辆拓展信息用于补充额外的信息,例如车辆的牌照。
139.进一步参考图6,交通控制系统可以包括出行者子系统(例如图1所示的出行者子系统101)601和车载子系统(例如图1所示的计算设备103)602;下面结合图5对交通控制系统进行说明。如图5,其示出了根据本技术的交通控制方法的一个实施例的流程图。其中,
140.出行者子系统601,用于获取其他交通参与者的意图信息和第一交通业务信息;以及向计算设备发送其他交通参与者的意图信息和第一交通业务信息。
141.计算设备,接收出行者子系统601发送的其他交通参与者的意图信息和第一交通业务信息;以及将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;以及根据其他交通参与者的意图信息和目标车辆的意图信息,生成第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶;以及向出行者子系统601发送第一交通行驶策略。
142.出行者子系统601,用于接收计算设备发送的第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
143.在本实施例的一些可选的实现方式中,计算设备可以为交通控制系统中的车载子系统602和路侧感知系统606。
144.在一个示例中,上述交通控制系统可以包括:车载子系统602和出行者子系统601。
145.在一个示例中,上述交通控制系统可以包括:路侧感知系统606和出行者子系统601。
146.其中,在路侧感知系统606生成第一交通行驶策略过程中,该策略感知系统还用于获取交通环境信息,以通过该交通环境信息生成第一交通行驶策略。
147.在图6中,该路侧感知系统606可以包括路侧感知设施、路侧计算设施和基础供应设施;其中,基础供应设施与路侧计算设施和路侧感知设施连接,基础供应设施用于向路侧计算设施和路侧感知设施提供基础供应;路侧感知设施,用于获取其他交通参与者的第一交通业务信息、其他交通参与者的意图信息、目标车辆的第二交通业务信息,以及交通环境
信息;路侧计算设施,用于将第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;以及根据目标车辆的意图信息、其他交通参与者的意图信息和交通环境信息,生成第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
148.对应地,在该示例中,路侧计算设施,具体用于:根据目标车辆的意图信息、其他交通参与者的意图信息和交通环境信息,确定意图优先级信息;根据意图优先级信息,生成第一交通行驶策略。
149.其中,路侧计算设施包括:计算单元,mec设施,或者边缘云。
150.其中,基础供应设施包括以下至少一项:电源、交换机、抱杆箱/机柜、光纤。
151.在本实施例中,路侧感知系统606(roadside sensing and positioning system)部署在路侧的由计算设施设施、感知设施及基础供应设施(即,相关附属设备)所组成的用于对道路交通参与者、交通事件和交通运行状况等进行实时检测识别和定位的系统。
152.在一个示例中,路侧感知系统空间坐标系可以采用cgcs2000坐标系,投影可以采用通用横轴墨卡托投影(universal transverse mercator,utm)。路侧感知系统时间坐标系可以采用协调世界时(coordinated universal time,utc)。
153.在一个示例中,路侧感知系统应可以具备标准时钟源同步功能,可以支持gps、ntp或ptp等时钟同步协议,宜具备对接入设备进行统一校时的功能,系统内各设备时间同步误差不大于5ms。
154.在一个示例中,路侧感知系统使用的高精度地图,地图要素应尽量多样丰富,横纵向的道路交通标线应清晰、准确,地图可以满足t/csae 185及相关标准要求。
155.在一个示例中,接入到同一路侧计算设施的感知摄像机输出的检测时间戳可以保持一致,不同感知设施的检测时间戳误差不大于100ms。
156.在一个示例中,路侧感知设施与路侧计算设施之间可以通过光纤和接入交换机进行网络通信和数据交互,接入交换机的单向带宽宜不小于15mbps。
157.在一个示例中,路侧感知系统可以兼容对接多类设备,并符合以下至少一项要求:
158.支持与rsu、激光雷达、毫米波雷达、摄像机等设备进行对接;支持与交通监控执法设备、交通信号控制机、气象环境监测设备等进行对接;支持同时接入多个不同种类或型号的设备;能对接入设备进行添加、删除操作,支持对接入设备进行状态监测;能实现与接入设备的数据交互。
159.对应地,在该示例中,路侧计算设施可以具备以下至少一项功能:支持摄像机、毫米波雷达、激光雷达等设备接入;支持从摄像机获取视频流并进行视频解码、目标检测、目标跟踪、目标定位等功能,从毫米波雷达获取结构化数据,从激光雷达获取点云数据,并进行目标融合定位、跟踪等功能;按规定对图像、视频与业务数据进行存储,可支持远程或本地数据查询检索;可根据车路协同应用需求,提供车载单元与其他设备通讯(vehicle to everything,v2x)应用服务,包括报文的制作、收发、解析和处理等对系统和接入设备进行管理,包括参数配置、ota升级、设备运维管理、远程开关机/重启、日志管理、高精度时钟同步等;支持与云控平台断网状态下,仍可提供不间断业务服务。
160.其中,路侧计算设施可以满足以下至少一项性能要求:灵活支持不同的设备选型和配置方案,算力支持不少于4路摄像头、4路毫米波雷达及1路激光雷达同时接入;路侧计
算设施对交通参与者、交通事件等融合感知识别的能力,包括检测准确率、时延、定位精度等;感知的结构化数据输出频率可以满足不同场景的应用需求。
161.其中,路侧计算设施可以满足以下至少一个接口要求:路侧计算设施至少可以具备2个以太网接口;支持接入到云控平台,将路侧感知定位结果信息发送到云控平台,开展更多车路协同应用服务,路侧计算设施与云控平台宜采用rj 45、光纤、usb、rs232、rs 485等接口方式,支持10000mbps以上网络传输;也可选配4g/5g/wifi(wireless-fidelity)等接入模块,支持无线回传;支持摄像头设备接入,可采用以太网接口方式,支持sdk(software development kit)、gb/t 28281或rtsp等协议;支持雷达设备接入,可采用以太网或rs485接口方式,支持二进制、十六进制或json等格式数据传输;支持rsu设备接入,可采用以太网或4g/5g等接口方式,支持asn.1或json格式数据传输;可支持其他交通安全设施或交通管理设施接入,可以采用以太网或4g/5g等接口方式,数据交互内容和格式可以符合道路交通或公安发布的标准规范。
162.在一个示例中,路侧感知系统可以实现对不同接入数据进行融合处理与智能分析的能力,符合以下至少一项要求:提供精准的时间基准与空间变换关系,保证不同传感器之间的时间同步与空间同步;支持雷达与摄像机原始感知数据或结构化数据的融合处理;支持行人、机动车、非机动车、障碍物或其他道路交通参与者检测识别与定位;支持道路交通事件的检测识别与定位;支持交通运行状况的检测识别。
163.在一个示例中,路侧感知系统可以包括相应的接口和数据服务:与rsu进行对接和数据交互,接口与数据交互内容可以满足t/its xxxx标准要求;与云控平台进行对接和数据交互,接口与数据交互内容可以满足t/its xxxx标准要求;与交通监控执法设备、交通信号控制机、气象环境监测设备的接口和数据交互内容可以满足相关标准要求。
164.在一个示例中,路侧感知系统可以识别的交通参与者类型包括但不限于:机动车:如轿车、卡车、大巴车、紧急或特殊车辆等,机动车分类满足ga 802标准;非机动车:如自行车、摩托车、三轮车、自行车等;行人;遗撒或低矮障碍物:如锥筒、三角警示牌、动物、纸箱、轮胎等;特殊目标:石墩、水马、立柱等。
165.在一个示例中,路侧感知系统可以识别交通参与者的静态和动态特征信息,交通参与者静态特征信息包括但不限于:交通参与者类型;目标物大小:三维尺寸;目标物大小置信度;参与者角点数据;车牌;颜色;车辆品牌;驾驶员信息。
166.另外,交通参与者动态特征信息可以满足t/its xxxx标准要求,包括但不限于:位置信息:经纬度、海拔;位置置信度;速度;速度置信度;四轴加速度;加速度置信度;航向角;航向角置信度;目标跟踪时长;机动车历史轨迹;机动车路径预测。
167.在一个示例中,上述交通事件类型可以满足gb/t 28789、gb/t29100及相关标准要求,包括但不限于:停止事件;逆行事件;行人事件;抛洒物事件;拥堵事件;低速/超速事件;交通事故;机动车驶离;道路施工;其他自定义事件。
168.在一个示例中,感知结果信息可以满足t/its xxxx标准要求,包括但不限于以下内容:交通事件类型;事件位置;事件所在车道;事件影响区域;事件持续时间;事件优先级;事件涉及的交通参与者信息。
169.其中,路侧计算设施(roadside computing facility)由于人、车辆、设施、环境之间的不协调导致正常交通秩序的突发性混乱事件。
170.在本公开的实施例中,路侧计算设施可以满足以下至少一项要求:mtbf不小于50000h,设备可用性宜不低于99.999%;工作温度:-30℃~+85℃;设备具备防浪涌,防静电,高抗震等特性;工作湿度:5%-95%,无冷凝;防水防尘等级:不低于ip66。
171.在一个示例中,感知摄像机可以满足以下至少一项要求:可根据需要选配枪式摄像机、球形摄像机或鱼眼摄像机等;摄像机可具备算力和ai处理能力,具备一定精度的感知识别与定位能力;具备交通事件检测功能的感知摄像机可以满足gb/t 28789及相关标准要求;具备监控执法功能的感知摄像机可以满足gb/t 28181、ga/t 1127及相关标准要求;具备交通运行监测功能的感知摄像机可以满足gb/t 24726、gb/t 33171及相关标准要求。
172.其中,感知摄像机可以满足以下至少一项功能要求:交通现场、场端连续视频监控;多码流视频录像;可具备自诊断和报警功能;支持gps或ntp时钟同步,且能输出毫秒级时间戳。
173.其中,感知摄像机可以满足以下至少一项性能要求:支持输出可配置的h.265或h.264码流,码流支持可定义,同时支持mjpeg编码,抓拍图片采用联合图像专家小组(joint photographic experts group,jpeg)编码及smart jpeg压缩,图片质量可设置;支持抓拍图片断网续传;可以采用不低于1/1.8英寸400万像素的互补金属氧化物半导体(complementary metal oxide semiconductor,cmos);可选支持近红外补光功能,最大红外补光距离100m。
174.其中,感知摄像机可以满足以下至少一项接口要求:至少1个rs-485接口或1个rs-232接口,1个rj45 10m/100m/1000m自适应以太网口;支持服务应用程序接口(internet server application programming interface,isapi)、gb/t28181协议,并支持sdk二次开发;设备可以支持实时流传输协议(real time streaming protocol,rtsp)及gb/t28181两种视频协议输出视频流。
175.其中,感知摄像机可以满足以下至少一项可靠性要求:工作环境温度:-30℃~+65℃;工作环境湿度:5%~95%,无凝结;防护等级:ip66;设备平均无故障工作时间(mean time between failure,mtbf)不小于50000h;具有防浪涌功能;光学窗口防尘防水,加热除雾除雪等功能。
176.其中,路侧感知摄像机在部署安装时,可以满足以下至少一项:部署在电警杆或监控杆的横臂上,安装位置尽量靠近道路中央位置;当电警杆或监控杆不可用时,可考虑使用信号灯杆,或另新立杆;部署高度可以为6~8m;感知区域内可以尽量避免树木等遮挡,以免影响感知设备的感知效果;设备安装应牢固,必要时可安装支护结构以保证稳定性。
177.在一个示例中,部署在路侧的毫米波雷达可以满足以下至少一项功能要求:可对8车道(含正向车道和反向车道)范围内的不少于256个检测目标进行检测,并可对检测目标进行轨迹跟踪监测;支持全球定位系统(global positioning system,gps)或网络时间协议(network time protocol,ntp)授时,可输出毫秒级时间戳;支持同时对多个服务端传输数据。
178.其中,路侧毫米波雷达可以满足以下至少一项性能要求:最远探测距离:纵向不少于250m;交通流量检测精度:≥95%;平均车速≥95%;占有率检测精度≥95%;排队长度检测精度:≥95%;测速范围0~220km/h;速度检测分辨率:0.6km/h;速度检测精度:0.2km/h;距离检测分辨率:近程0.5m,远程2m;距离检测精度:近程0.1m,远程0.5m;雷达角度分辨率
最大支持2
°
,测角精度最大支持0.25
°
;雷达帧率:不小于10fps。
179.其中,路侧毫米波雷达可以满足以下至少一项接口要求:支持至少1个rs485/232接口或1个10/100/1000m自适应rj45接口;支持通过传输控制协议(transmission control protocol,tcp)/用户数据报协议(user datagram protocol,udp)方式连接其他设备。
180.其中,路侧毫米波雷达可以满足以下至少一项可靠性要求:工作环境温度:-30℃~+65℃;工作环境湿度:0%~95%,无凝结;防护等级:ip65;撞机/振动承受度:100g/rms;14g/rms;mtbf≥50000h;具有电压过载保护,浪涌保护,设备防雷屏蔽;可在全气候环境下稳定工作,包括雨、雾、雪、大风、冰、灰尘等。
181.其中,部署在路侧的激光雷达可以满足以下至少一项功能要求:支持雷达数据获取、可视化、存储和回放功能;支持gps、ntp或高精度时间同步协议(precise time protocol,ptp)校时,输出毫秒级时间戳;支持点云输出、跟踪目标输出点云和跟踪目标输出;支持多种回波检测方式设定;支持多雷达数据融合功能。
182.其中,路侧激光雷达可以满足以下至少一项性能要求:测距:150m@10%nist,量程与感知距离不低于200m;距离精度≤
±
3cm,均方根误差≤3cm;跟踪目标数不小于128个;视角(垂直):不低于25
°
;视角(水平):100
°
以上;垂直角度分辨率平均不小于0.2
°
;水平角度分辨率平均不小于0.2
°
;帧率:不低于10hz;防护等级:生物安全1级或者豁免等级;虚警率(@100klx)《0.01%;主动防串扰/干扰功能;雨、雪、雾、霾等天气条件下正常工作;24v供电电压。
183.其中,路侧激光雷达可以满足以下至少一项接口要求:至少一个10m/100m/1000m自适应rj45以太网口或rs485接口;宽电压支持,兼容24v
±
20%;支持udp/tcp通讯协议;应用层支持消息队列遥测传输(message queuing telemetry transport,mqtt)协议或protobuf协议;支持ntp时间同步协议,可选pps、ptp、ptpv2、gps等协议。
184.其中,路侧激光雷达可以满足以下至少一项可靠性要求:工作环境温度:-30℃~+65℃;工作环境湿度:0%~95%,无凝结;防护等级:ip67;mtbf时间不小于50000h。
185.其中,云控平台(cloud control platform)603服务于车路协同业务的平台系统,具有实时信息融合与共享、实时计算编排、智能应用编排、大数据分析、信息安全等基础服务能力,可为智能汽车、管理及服务机构、终端用户提供辅助驾驶、自动驾驶、交通运输安全、交通管理等协同应用和数据服务。
186.其中,出行者子系统由其他交通参与者所携带的各类信息终端或其它信息处理设备构成。出行者子系统可以为与用户通过键盘、触摸板、触摸屏、遥控器、语音交互或手写设备等一种或多种方式进行人机交互的电子产品,例如pc(personal computer,个人计算机)、手机、智能手机、pda(personal digital assistant,个人数字助手)、可穿戴设备、ppc(pocket pc,掌上电脑)、平板电脑、智能车机、智能电视、智能音箱、平板电脑、膝上型便携计算机和台式计算机等等;出行者子系统可以为具备通信功能的非机动车。当出行者子系统101为软件时,其可以实现成多个软件或软件模块,也可以实现成单个软件或软件模块。在此不做具体限定。
187.其中,车载子系统可以包括车载终端,也可以包括车载计算控制模块、车载网关、路由器等。
188.在本实施例的一些可选的实现方式中,交通安全与管理设施606包括:交通监控设
施、交通诱导设施、气象监控设施。
189.在本实施例的一些可选的实现方式中,车载子系统602包括以下至少一项:车载终端、车载计算控制模块、车载网关、路由器。
190.其中,路侧子系统可以包括路侧通信设施、路侧感知设施、路侧计算设施等,也可以包括用于交通安全、交通管理、出行服务的各类设备设施。
191.对应地,在该示例中,交通安全管理可以包括以下至少一项:紧急事件通告、紧急车辆调度与优先通行、运输车辆及驾驶员的安全监控、超载超限管理、弱势交通群体安全保护。
192.交通管理包括以下至少一项:交通法规告知、交通信号动态优化、交通流量监控。
193.出行服务包括以下至少一项:实时指引与导航;施工、交通事件、交通信号灯等信息提醒;建议行程、兴趣点通知。
194.其中,中心子系统:可以包括中心解密、中心交换、服务组件节点、服务路由器和中心接入节点等,具备网络管理、业务支撑和服务等能力。
195.其中,交通安全与管理设施606的工作状态可以包括:交通监控设施、交通诱导设施、气象监控设施、收费设施、其他设施。
196.需要说明的是,路侧感知系统606可以通过通信设施605与车载子系统602和出行者子系统601进行数据传输。该通信设施605可以通过基于lte的车用无线通信技术(lte vehicle to everything,lte-v2x)、专用短程通信技术(dedicated short range communication,dsrc)、6g(the 6generation mobile communication technology)/5g(5th-generation mobile communication technology)等传输方式传输数据。另外,车载子系统602和出行者子系统601可以通过车载单元与行人通讯(vehicle to pedestrian,v2p)进行数据传输。
197.对应地,在该示例中,路侧计算设施,还用于:向云控平台603发送第一交通行驶策略,以使云控平台603向车载子系统602、出行者子系统601和交通安全与管理设施604,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶,以及用于控制是否调整交通安全与管理设施604的工作状态。
198.在一个示例中,通过路侧计算设施向云控平台603发送第一交通策略,或通过图6中的通信设施605(例如,具备通信功能的芯片)向云控平台603发送第一交通策略。
199.其中,交通环境信息包括:信号灯信息和/或天气信息。
200.其中,交通安全与管理设施604的工作状态可以包括:交通监控设施、交通诱导设施、气象监控设施、收费设施、其他设施。
201.需要说明的是,路侧感知系统606可以通过通信设施605与车载子系统602和出行者子系统601进行数据传输。该通信设施605可以通过lte-v2x、dsrc、4g/5g等传输方式传输数据。另外,车载子系统602和出行者子系统601可以通过v2p进行数据传输。
202.在一个示例中,上述交通控制系统可以包括:路侧感知系统606、出行者子系统601和车载子系统602。
203.在本实施例的一些可选的实现方式中,上述交通控制系统还可以包括:云控平台603。
204.需要说明的是,该路侧感知系统606还可以向云控平台603发送运维数据,例如接
收交通安全与管理设施604和/或路侧感知设施运行时产生的运维数据,以使云控平台603可以对路侧感知系统606和交通安全与管理设施604的运行情况进行检测。
205.另外,在路侧感知系统606将第一交通行驶策略发送至云控平台603之后,该云控平台603可以将目标道路上的多个路侧感知系统606输出的第一交通行驶策略进行汇总。
206.进一步参考图7,作为对上述各图所示方法的实现,本公开提供了一种交通控制装置的一个实施例,该装置实施例与图2所示的方法实施例相对应,该装置具体可以应用于各种电子设备中。
207.如图7所示,本实施例的交通控制装置700可以包括:信息获取模块701、信息发送模块702和策略接收模块703。其中,信息获取模块701,被配置成获取其他交通参与者的意图信息和第一交通业务信息;信息发送模块702,被配置成向计算设备发送其他交通参与者的意图信息和第一交通业务信息;策略接收模块703,被配置成接收计算设备发送的第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶。
208.在本实施例中,交通控制装置700中:信息获取模块701、信息发送模块702和策略接收模块703的具体处理及其所带来的技术效果可分别参考图2对应实施例中的步骤201-203的相关说明,在此不再赘述。
209.在本实施例的一些可选的实现方式中,策略接收模块703,还被配置成:接收计算设备发送的第二交通行驶策略,第二交通行驶策略用于控制目标车辆按照第二交通业务信息继续行驶。
210.在本实施例的一些可选的实现方式中,策略接收模块703,还被配置成:接收计算设备发送的第三交通行驶策略,第三交通行驶策略用于控制目标车辆按照第三交通业务信息行驶和控制其他交通参与者按照第四交通业务信息行驶。
211.在本实施例的一些可选的实现方式中,第一交通业务信息包括以下至少一项:其他交通参与者基础信息、其他交通参与者动力信息、其他交通参与者附属物信息。
212.进一步参考图8,作为对上述各图所示方法的实现,本公开提供了一种交通控制装置的一个实施例,该装置实施例与图3所示的方法实施例相对应,该装置具体可以应用于各种电子设备中。
213.如图8所示,本实施例的交通控制装置800可以包括:信息接收模块801、意图得到模块802、策略生成模块803和策略发送模块804。其中,信息接收模块801,被配置成接收出行者子系统发送的其他交通参与者的意图信息和第一交通业务信息;意图得到模块802,被配置成将目标车辆的第二交通业务信息输入到预先训练的意图识别模型中,得到目标车辆的意图信息;策略生成模块803,被配置成根据其他交通参与者的意图信息和目标车辆的意图信息,生成第一交通行驶策略,其中,第一交通行驶策略用于控制其他交通参与者按照第一交通业务信息继续行驶;策略发送模块804,被配置成向出行者子系统发送第一交通行驶策略。
214.在本实施例中,交通控制装置800中:信息接收模块801、意图得到模块802、策略生成模块803和策略发送模块804的具体处理及其所带来的技术效果可分别参考图3对应实施例中的步骤301-304的相关说明,在此不再赘述。
215.在本实施例的一些可选的实现方式中,策略生成模块803,包括:优先级确定单元,
被配置成根据其他交通参与者的意图信息和目标车辆的意图信息,确定意图优先级信息;第一策略生成单元,被配置成根据意图优先级信息,生成第一交通行驶策略。
216.在本实施例的一些可选的实现方式中,第一策略生成单元,进一步被配置成:响应于其他交通参与者的意图信息对应的优先级高于目标车辆的意图信息对应的优先级,确定目标车辆是否处于第一预设区域内,其中,第一预设区域为允许目标车辆执行第一交通行驶策略的区域;响应于目标车辆处于第一预设区域内,根据意图优先级信息,生成第一交通行驶策略。
217.在本实施例的一些可选的实现方式中,该交通控制装置还包括:第二策略生成单元,被配置成响应于目标车辆不处于第一预设区域内,生成第二交通行驶策略,其中,第二交通行驶策略用于控制目标车辆按照第二交通业务信息继续行驶;策略发送模块804,还被配置成向出行者子系统发送第二交通行驶策略。
218.在本实施例的一些可选的实现方式中,该交通控制装置还包括:第三策略生成单元,被配置成响应于目标车辆不处于第一预设区域内,根据第二交通业务信息和第一交通业务信息,确定第三交通行驶策略,其中,第三交通行驶策略用于控制目标车辆按照第三交通业务信息行驶和控制其他交通参与者按照第四交通业务信息行驶;策略发送模块,还被配置成向出行者子系统发送第三交通行驶策略。
219.在本实施例的一些可选的实现方式中,第一策略生成单元,包括:第一确定子单元,被配置成响应于意图优先级信息包括目标车辆的优先级低于其他交通参与者,确定目标车辆对应的协作车辆,其中,协作车辆为目标车辆的第二预设区域内的车辆;第一策略生成子单元,被配置成生成针对目标车辆和协作车辆的第一交通行驶策略,其中,第一交通行驶策略用于指示目标车辆以第一预设幅度减速行驶和协作车辆以第二预设幅度减速行驶,第一预设幅度和第二预设幅度与意图优先级信息对应。
220.在本实施例的一些可选的实现方式中,第二预设区域包括在预设方向上与目标车辆之间的距离小于预设阈值的区域,预设阈值与意图优先级信息对应。
221.在本实施例的一些可选的实现方式中,第一确定子单元,进一步被配置成:将在预设方向上与目标车辆之间的距离最小的预设个车辆,确定为目标车辆对应的协作车辆。
222.在本实施例的一些可选的实现方式中,第二交通业务信息包括以下至少一项:车辆基础信息、车辆动力信息、车辆附属物信息。
223.根据本公开的实施例,本公开还提供了一种电子设备、一种可读存储介质、一种计算机程序产品、一种交通控制系统。
224.图9示出了可以用来实施本公开的实施例的示例电子设备900的示意性框图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字处理、蜂窝电话、智能电话、可穿戴设备和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本公开的实现。
225.如图9所示,设备900包括计算单元901,其可以根据存储在只读存储器(rom)902中的计算机程序或者从存储单元908加载到随机访问存储器(ram)903中的计算机程序,来执行各种适当的动作和处理。在ram 903中,还可存储设备900操作所需的各种程序和数据。计
算单元901、rom 902以及ram 903通过总线904彼此相连。输入/输出(i/o)接口905也连接至总线904。
226.设备900中的多个部件连接至i/o接口905,包括:输入单元906,例如键盘、鼠标等;输出单元907,例如各种类型的显示器、扬声器等;存储单元908,例如磁盘、光盘等;以及通信单元909,例如网卡、调制解调器、无线通信收发机等。通信单元909允许设备900通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
227.计算单元901可以是各种具有处理和计算能力的通用和/或专用处理组件。计算单元901的一些示例包括但不限于中央处理单元(cpu)、图形处理单元(gpu)、各种专用的人工智能(ai)计算芯片、各种运行机器学习模型算法的计算单元、数字信号处理器(dsp)、以及任何适当的处理器、控制器、微控制器等。计算单元901执行上文所描述的各个方法和处理,例如交通控制方法。例如,在一些实施例中,交通控制方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元908。在一些实施例中,计算机程序的部分或者全部可以经由rom 902和/或通信单元909而被载入和/或安装到设备900上。当计算机程序加载到ram 903并由计算单元901执行时,可以执行上文描述的交通控制方法的一个或多个步骤。备选地,在其他实施例中,计算单元901可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行交通控制方法。
228.本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、场可编程门阵列(fpga)、专用集成电路(asic)、专用标准产品(assp)、芯片上系统的系统(soc)、负载可编程逻辑设备(cpld)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
229.用于实施本公开的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
230.在本公开的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或快闪存储器)、光纤、便捷式紧凑盘只读存储器(cd-rom)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
231.为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机具有:用于向用户显示信息的显示装置(例如,crt(阴极射线管)或者lcd(液晶显示器)监视
器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。
232.可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(lan)、广域网(wan)和互联网。
233.计算机系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端-服务器关系的计算机程序来产生客户端和服务器的关系。服务器可以是云服务器,也可以为分布式系统的服务器,或者是结合了区块链的服务器。
234.人工智能是研究计算机来模拟人的某些思维过程和智能行为(如学习、推理、思考、规划等)的学科,既有硬件层面的技术也有软件层面的技术。人工智能硬件技术一般包括如传感器、专用人工智能芯片、云计算、分布式存储、大数据处理等技术;人工智能软件技术主要包括计算机视觉技术、语音识别技术、自然语音处理技术以及机器学习/深度学习、大数据处理技术、知识图谱技术等几大方向。
235.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开提及的技术方案所期望的结果,本文在此不进行限制。
236.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1