车牌识别一体机的制作方法
1.本实用新型涉及一种停车场管理设备,尤其是涉及一种车牌识别一体机。
背景技术:
2.车辆出入停车场的时候,需要有车牌识别设备对车牌进行识别并上传到上上位机。传统的车牌识别设备是通过距离传感器来检测是否有来车,可能会发生人员、动物、自行车等进入车道而启动设备的情况,而此时设备是无法拍摄到带车牌号码的图片,会让上位机进行无效的识别操作,误报率较高。
技术实现要素:
3.本实用新型主要是解决现有技术所存在的具有较高误报率的技术问题,提供一种可以准确判断是否有来车、避免误报的车牌识别一体机。
4.本实用新型针对上述技术问题主要是通过下述技术方案得以解决的:一种车牌识别一体机,包括外壳,外壳上部正面安装有摄像头,外壳中部正面嵌装有显示屏,外壳下部正面安装有补光灯,外壳内设有控制电路,控制电路包括主控模块,摄像头、显示屏和补光灯均与主控模块连接,主控模块还连接有地感线圈模块,地感线圈模块包括地感线圈l1,地感线圈l1的第一端连接三极管q1的集电极,地感线圈的第二端接地,三极管q1的基极连接电阻r25的第一端和电阻r21的第二端,电阻r25的第二端接地,电阻r21的第一端连接电源vcc,三极管q1的发射极通过电阻r22连接电源vcc,三极管q1的集电极还连接电容c1的第一端,电容c1的第二端通过电阻r24连接三极管q2的基极,三极管q2的发射极连接三极管q1的发射极,三极管q2的集电极接地,三极管q2的基极还连接电阻r23的第二端和电阻r31的第一端,电阻r23的第一端连接电源vcc,电阻r31的第二端通过电容c2连接电容c1的第一端,电阻r29的第一端连接电容c1的第一端,电阻r29的第二端连接二极管d1的正极,二极管d1的负极连接电阻r38的第一端,电阻r38的第二端通过地感信号连接主控模块,电容c3和电阻r38并联,地感线圈埋置在来车方向的车道内,主控模块通过通讯模块连接上位机和道闸,电源模块为其他各部件供电。
5.当有车停在车道上地感线圈的上方时,地感线圈模块输出地感信号到主控模块,此时主控模块才去启动补光灯补光,并通过摄像头拍摄带车牌号的图片上传到上位机。上位机避免了对无效图案的识别处理过程,尤其是对于一台上位机控制多个出入口的停车场,可以有效降低误报率,减轻上位机的无用负荷。显示屏用于显示车牌号、出入场时间、费用等信息。
6.作为优选,所述主控模块包括主控芯片u1,主控芯片u1为stm32f103rct6,主控芯片u1的51脚连接地感线圈模块。
7.主控模块控制其他各部件的工作。
8.作为优选,所述摄像头包括cmos模组,cmos模组的2脚、3脚、4脚、5脚、6脚、7脚、8脚、9脚、20脚和19脚分别连接主控芯片的34脚、33脚、30脚、29脚、62脚、61脚、59脚、58脚、57
脚和56脚,cmos模组的11脚、12脚、13脚、14脚、15脚、16脚、17脚和18脚分别连接主控模块的23脚、22脚、21脚、20脚、17脚、16脚、15脚和14脚。
9.cmos模组将摄像头拍摄的图像信号编码以后发送到主控模块。
10.作为优选,所述显示屏的驱动芯片1脚接地,驱动芯片2脚连接电源vcc,驱动芯片的3脚、4脚、5脚、6脚和7脚分别连接主控芯片的45脚、44脚、43脚、42脚和41脚。
11.驱动芯片根据主控模块的信号控制显示屏的显示内容。
12.作为优选,所述补光灯包括4个发光二极管,每个发光二极管的正极通过一个电阻连接电源vcc,每个发光二极管的负极连接主控芯片u1的53脚。
13.补光灯用于拍摄时的补光,确保获取到足够亮度的图片。
14.作为优选,所述通讯模块包括以太网单元和串口单元,以太网单元包括以太网芯片fc62115bnl和静电保护芯片srv05-4,以太网芯片的1脚、2脚、3脚和6脚分别连接主控芯片的8脚、9脚、10脚和11脚,以太网芯片的10脚通过电阻r51连接主控芯片的24脚,以太网芯片的11脚通过电阻r52连接主控芯片的25脚,静电保护芯片的1脚、3脚、4脚和6脚分别连接以太网芯片的3脚、6脚、2脚和1脚,静电保护芯片的2脚接地。
15.以太网单元一般用于和上位机的连接,发送图片信号到上位机并接收上位机发送过来的显示内容、道闸控制指令等数据。
16.作为优选,所述串口单元包括第一rs485模块包括电源芯片u10和串口芯片u11,电源芯片u10为b0505s-1w芯片,串口芯片u11为adm2481芯片;电源芯片u10的1脚和3脚接地,电源芯片u10的2脚连接电源vcc,电源芯片u10的4脚输出电源vcc_1,电容c19跨接在电源芯片u10的1脚和2脚之间,电容c20跨接在电源芯片u10的3脚和4脚之间,电阻r53和电容c20并联;串口芯片u11的3脚通过电阻r54连接主控芯片u1的38脚,串口芯片u11的6脚通过电阻r56连接主控芯片u1的37脚,三极管q5的基极通过电阻r57连接串口芯片u11的6脚,三极管q5的集电极连接串口芯片u11的4脚和5脚,三极管q5的发射极接地,串口芯片u11的12脚和13脚分别通过电阻r59和电阻r58连接接口j6的2脚和1脚,接口j6连接上位机或道闸,串口芯片u11的16脚连接电源vcc_1。
17.串口单元一般用于连接道闸,控制道闸的开放和关闭。
18.本实用新型带来的有益效果是,可以准确感应是否有车辆在车道内,减少误报率,降低上位机的负荷。
附图说明
19.图1是本实用新型的一种结构示意图;
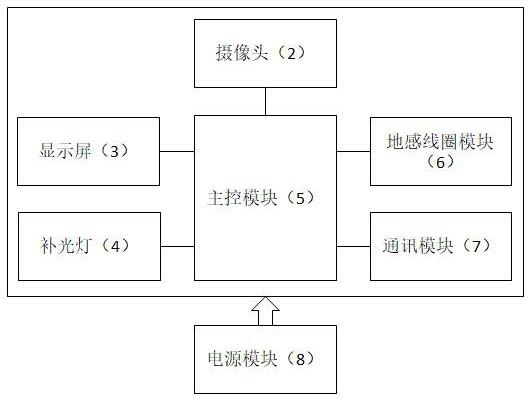
20.图2是本实用新型的一种电路框图;
21.图3是本实用新型的一种地感线圈模块电路原理图;
22.图4是本实用新型的一种主控模块电路原理图;
23.图5是本实用新型的一种cmos模组电路原理图;
24.图6是本实用新型的一种显示屏电路原理图;
25.图7是本实用新型的一种补光灯电路原理图;
26.图8是本实用新型的一种以太网单元电路原理图;
27.图9是本实用新型的一种串口单元电路原理图;
28.图中:1、外壳;2、摄像头;3、显示屏;4、补光灯;5、主控模块;6、地感线圈模块;7、通讯模块;8、电源模块。
具体实施方式
29.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
30.实施例:本实施例的一种车牌识别一体机,如图1所示,包括外壳1,外壳上部正面安装有摄像头2,外壳中部正面嵌装有显示屏3,外壳下部正面安装有补光灯4,外壳内设有控制电路。如图2所示,控制电路包括主控模块5,摄像头、显示屏和补光灯均与主控模块连接,主控模块还连接有地感线圈模块6和通讯模块7。如图3所示,地感线圈模块包括地感线圈l1,地感线圈l1的第一端连接三极管q1的集电极,地感线圈的第二端接地,三极管q1的基极连接电阻r25的第一端和电阻r21的第二端,电阻r25的第二端接地,电阻r21的第一端连接电源vcc,三极管q1的发射极通过电阻r22连接电源vcc,三极管q1的集电极还连接电容c1的第一端,电容c1的第二端通过电阻r24连接三极管q2的基极,三极管q2的发射极连接三极管q1的发射极,三极管q2的集电极接地,三极管q2的基极还连接电阻r23的第二端和电阻r31的第一端,电阻r23的第一端连接电源vcc,电阻r31的第二端通过电容c2连接电容c1的第一端,电阻r29的第一端连接电容c1的第一端,电阻r29的第二端连接二极管d1的正极,二极管d1的负极连接电阻r38的第一端,电阻r38的第二端通过地感信号连接主控模块,电容c3和电阻r38并联,地感线圈埋置在来车方向的车道内,主控模块通过通讯模块连接上位机和道闸,电源模块8为其他各部件供电。
31.当有车停在车道上地感线圈的上方时,地感线圈模块输出地感信号到主控模块,此时主控模块才去启动补光灯补光,并通过摄像头拍摄带车牌号的图片上传到上位机。上位机避免了对无效图案的识别处理过程,尤其是对于一台上位机控制多个出入口的停车场,可以有效降低误报率,减轻上位机的无用负荷。显示屏用于显示车牌号、出入场时间、费用等信息。
32.如图4所示,主控模块包括主控芯片u1,主控芯片u1为stm32f103rct6,主控芯片u1的51脚连接地感线圈模块。
33.主控模块控制其他各部件的工作。
34.摄像头包括cmos模组,如图5所示,cmos模组的2脚、3脚、4脚、5脚、6脚、7脚、8脚、9脚、20脚和19脚分别连接主控芯片的34脚、33脚、30脚、29脚、62脚、61脚、59脚、58脚、57脚和56脚,cmos模组的11脚、12脚、13脚、14脚、15脚、16脚、17脚和18脚分别连接主控模块的23脚、22脚、21脚、20脚、17脚、16脚、15脚和14脚。
35.cmos模组将摄像头拍摄的图像信号编码以后发送到主控模块。
36.如图6所示,显示屏的驱动芯片1脚接地,驱动芯片2脚连接电源vcc,驱动芯片的3脚、4脚、5脚、6脚和7脚分别连接主控芯片的45脚、44脚、43脚、42脚和41脚。
37.驱动芯片根据主控模块的信号控制显示屏的显示内容。
38.如图7所示,补光灯包括4个发光二极管,每个发光二极管的正极通过一个电阻连接电源vcc,每个发光二极管的负极连接主控芯片u1的53脚。
39.补光灯用于拍摄时的补光,确保获取到足够亮度的图片。
40.通讯模块包括以太网单元和串口单元。如图8所示,以太网单元包括以太网芯片
fc62115bnl和静电保护芯片srv05-4,以太网芯片的1脚、2脚、3脚和6脚分别连接主控芯片的8脚、9脚、10脚和11脚,以太网芯片的10脚通过电阻r51连接主控芯片的24脚,以太网芯片的11脚通过电阻r52连接主控芯片的25脚,静电保护芯片的1脚、3脚、4脚和6脚分别连接以太网芯片的3脚、6脚、2脚和1脚,静电保护芯片的2脚接地。
41.以太网单元一般用于和上位机的连接,发送图片信号到上位机并接收上位机发送过来的显示内容、道闸控制指令等数据。
42.如图9所示,串口单元包括第一rs485模块包括电源芯片u10和串口芯片u11,电源芯片u10为b0505s-1w芯片,串口芯片u11为adm2481芯片;电源芯片u10的1脚和3脚接地,电源芯片u10的2脚连接电源vcc,电源芯片u10的4脚输出电源vcc_1,电容c19跨接在电源芯片u10的1脚和2脚之间,电容c20跨接在电源芯片u10的3脚和4脚之间,电阻r53和电容c20并联;串口芯片u11的3脚通过电阻r54连接主控芯片u1的38脚,串口芯片u11的6脚通过电阻r56连接主控芯片u1的37脚,三极管q5的基极通过电阻r57连接串口芯片u11的6脚,三极管q5的集电极连接串口芯片u11的4脚和5脚,三极管q5的发射极接地,串口芯片u11的12脚和13脚分别通过电阻r59和电阻r58连接接口j6的2脚和1脚,接口j6连接上位机或道闸,串口芯片u11的16脚连接电源vcc_1。
43.串口单元一般用于连接道闸,控制道闸的开放和关闭。
44.本文中所描述的具体实施例仅仅是对本发明创造精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的原理或者超越所附权利要求书所定义的范围。
45.尽管本文较多地使用了地感线圈、摄像头、补光灯、上位机等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本发明创造精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1