安全驾驶判定装置的制作方法
1.本发明涉及一种安全驾驶判定装置。
背景技术:
2.以往,已知一种装置,通过驾驶车辆的驾驶员的脸部朝向方向来判定驾驶员不注视前方(侧视),在判定为驾驶员不注视前方的情况下向驾驶员发出警报。在专利文献1中,公开了一种具有判定驾驶员的视线是否为不注视前方的方向的功能的不注视状态判定装置。
3.现有技术文献
4.专利文献
5.专利文献1:特开2020-24532号公报
技术实现要素:
6.发明要解决的问题
7.以往的不注视状态判定装置如果驾驶员的视线朝向不注视前方的方向的时间在规定时间以上时,则判定为驾驶员是不注视前方状态。但是,根据道路的状态,成处于不注视前方状态对安全性的影响的大小不同。因此,若无论道路的状态如何不注视状态判定装置都使用相同的基准来判定是否处于不注视前方状态,则存在尽管安全但判定为是不注视前方状态而发出警报,或者虽然危险但判定为不是不注视前方状态而不发出警报的问题。
8.因此,本发明是鉴于这些问题而完成的,其目的在于,无论道路的状态如何都能够适当判定驾驶员是否为不注视状态。
9.解决问题的方案
10.本发明的方面的安全驾驶判定装置通过拍摄装置对车辆的驾驶员进行拍摄,取得以所述车辆的行进方向为基准时的表示所述驾驶员的脸部朝向角度的角度值,基于取得的所述角度值判定所述驾驶员是否处于不注视前方状态,所述安全驾驶判定装置具有:角度值计算部,计算表示所述驾驶员相对于所述行进方向的横摆方向的脸部朝向角度和所述驾驶员相对于所述行进方向的俯仰方向的脸部朝向角度中的至少一个脸部朝向角度的角度值;判定部,基于过去的规定的判定期间内的角度值的累计值是否为阈值以上,判定所述驾驶员是否处于不注视前方状态;以及道路状态确定部,确定所述车辆正在行驶的道路的状态,所述判定部基于所述车辆正在行驶的道路的状态来决定所述判定期间。
11.所述道路状态确定部可以将所述车辆正在行驶的车道的宽度确定为所述道路的状态,所述判定部可以将所述车道的宽度为阈值以上的情况下的所述判定期间设定为比所述车道的宽度小于所述阈值的情况下的所述判定期间长。
12.所述道路状态确定部可以将所述车辆正在行驶的车道的宽度确定为所述道路的状态,所述判定部可以基于所述车道的宽度确定所述车辆正在行驶的道路是高速道路还是一般道路,并将所述道路是高速道路的情况下的所述判定期间设定为比所述道路是一般道
路的情况下的所述判定期间长。
13.所述道路状态确定部可以将所述车辆正在行驶的道路中的距所述辆规定范围内的人或车辆的密度确定为所述道路的状态,所述判定部可以使所述密度为阈值以上的情况下的所述判定期间比所述密度小于阈值的情况下的所述判定期间短。
14.所述道路状态确定部可以从存储有与时刻、道路的位置和所述密度相关联的道路状态信息的外部装置取得与所述车辆行驶中的时刻对应的所述道路状态信息,并且将在取得的所述道路状态信息中与所述车辆行驶中的位置相关联的所述密度确定为所述道路的状态。
15.所述道路状态确定部可以将所述车辆正在行驶的车道的宽度和所述车辆正在行驶的道路中的距所述车辆规定范围内的人或车辆的密度确定为所述道路的状态,如果所述车道的宽度小于阈值并且所述密度小于阈值,则所述判定部可以设定比在所述密度为阈值以上的情况下设定的所述判定期间长的判定期间,如果所述车道的宽度为阈值以上并且所述密度为阈值以上,则所述判定部可以设定比在所述密度小于阈值的情况下设定的所述判定期间短的判定期间。
16.还可以具有操作受理部,操作受理部从所述车辆的驾驶员接受设定操作,所述设定操作用于针对所述车辆行驶中的道路的每个状态设定所述判定期间的长度,所述判定部可以结合所述道路状态确定部确定的道路的状况将所述判定期间决定为所述操作受理部接受的所述设定操作表示的长度。
17.发明的效果
18.根据本发明,具有无论道路的状态如何都能够适当判定驾驶员是否为不注视状态的效果。
附图说明
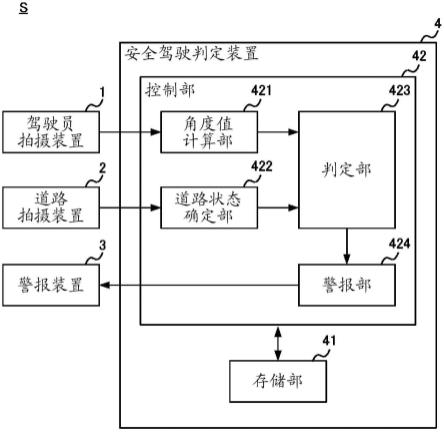
19.图1是表示本发明的车辆s的构成的图。
20.图2是表示驾驶员拍摄装置1与驾驶员的脸部朝向角度的关系的图。
21.图3是表示判定部423基于从道路状态确定部422取得的车道的宽度来设定判定期间的处理的流程图的图。
22.图4是表示判定部423基于从道路状态确定部422取得的人或车辆的密度来设定判定期间的处理的流程图的图。
23.图5是表示具有外部装置5的车辆s的构成的图。
24.图6是表示具有操作受理部425的车辆s的构成的图。
具体实施方式
25.《车辆s的构成》
26.图1是表示本发明的车辆s的构成的图。车辆s具有驾驶员拍摄装置1、道路拍摄装置2、警报装置3和安全驾驶判定装置4。
27.驾驶员拍摄装置1设置在车辆s的驾驶席上,例如包括ccd相机。驾驶员拍摄装置1从前方对坐在驾驶席上的驾驶员进行拍摄,生成拍摄图像。例如,驾驶员拍摄装置1对车辆s行驶中的驾驶员的脸部进行拍摄,生成能够确定驾驶员相对于车辆s的行进方向的脸部朝
向角度的拍摄图像。驾驶员拍摄装置1将生成的拍摄图像输出到安全驾驶判定装置4。
28.图2是表示驾驶员拍摄装置1与驾驶员的脸部朝向角度的关系的图。图2的(a)示出了从驾驶员d的侧面观察的图,图2的(b)示出了从驾驶员d的上方观察的图。如图2的(a)和图2的(b)所示,驾驶员拍摄装置1相对于驾驶员d的脸部例如设置在斜下方,而不设置在驾驶员d的脸部的正面。
29.道路拍摄装置2例如包括多个ccd相机,对行驶中的车辆s的前后及左右的道路进行拍摄,生成拍摄图像。例如,道路拍摄装置2对车辆s行驶中的车道等进行拍摄,生成能够确定行驶中的道路的车道的宽度的拍摄图像。道路拍摄装置2将生成的拍摄图像输出到安全驾驶判定装置4。
30.警报装置3是基于从安全驾驶判定装置4通知驾驶中的驾驶员不注视前方(例如侧视)来对驾驶员发出警告的装置。警报装置3例如包括发出报警的声音的扬声器、显示警告画面的显示部、以及产生振动的振动产生部。此外,警报装置3也可以组合声音、显示以及振动中的至少两个来发出警报。
31.安全驾驶判定装置4是基于判定驾驶员是否处于不注视前方状态的结果来判定是否正在安全驾驶的装置。安全驾驶判定装置4通过驾驶员拍摄装置1对车辆s的驾驶员进行拍摄,并取得以车辆s的行进方向为基准时的表示驾驶员的脸部朝向角度的角度值。安全驾驶判定装置4基于道路拍摄装置2拍摄的图像,确定例如包括车辆s行驶中的车道的宽度的道路状态。
32.安全驾驶判定装置4基于所取得的角度值和所确定的道路状态来判定车辆s的驾驶员是否处于不注视前方状态。安全驾驶判定装置4在判定为驾驶员处于不注视前方状态的情况下,通知警报装置3发出警报。
33.安全驾驶判定装置4具有存储部41和控制部42。存储部41具有rom(read only memory)、ram(random access memory)以及硬盘等存储介质。存储部41存储后述的控制部42所执行的程序。存储部41例如存储有与驾驶员的脸部朝向角度相关的信息以及与车辆s行驶的道路的状态相关的信息。
34.控制部42例如是cpu(central processing unit)。控制部42通过执行存储在存储部41中的程序,作为角度值计算部421、道路状态确定部422、判定部423以及警报部424发挥作用。控制部42在确定驾驶员的脸部朝向角度以及车辆s行驶中的道路的状态的同时,判定驾驶员是否处于不注视前方状态。
35.角度值计算部421基于驾驶员拍摄装置1拍摄的拍摄图像,计算驾驶员的脸部朝向的角度值。角度值计算部421计算表示驾驶员相对于行进方向的横摆方向(图2的(b))的脸部朝向角度和驾驶员相对于行进方向的俯仰方向(图2的(a))的脸部朝向角度中的至少一个脸部朝向角度的角度值。角度值计算部421将计算出的角度值通知给判定部423。
36.道路状态确定部422基于道路拍摄装置2拍摄的拍摄图像,确定车辆s正在行驶的道路的状态。道路的状态例如是车辆s行驶中的车道的宽度、道路的种类、道路内的车辆或人的密度。道路状态确定部422将所确定的道路的状态通知给判定部423。
37.道路状态确定部422例如基于从道路拍摄装置2取得的拍摄图像,将在车辆s的前后及左右检测出的、与车辆s不同的车辆的数量确定为道路内的车辆的密度。道路状态确定部422例如基于从道路拍摄装置2取得的拍摄图像,将车辆s周围的规定范围内(例如10米以
内)的人的数量确定为道路内的人的密度。
38.判定部423基于过去的规定的判定期间内的角度值的累计值是否为阈值以上,判定驾驶员是否处于不注视前方状态。判定部423基于道路状态确定部422确定的车辆s正在行驶的道路的状态来决定判定期间。
39.例如,判定部423决定在从道路状态确定部422取得的车辆s行驶中的车道的宽度为阈值以上的情况下比在车道的宽度小于阈值的情况下长的判定期间。车道的宽度的阈值例如为3.5米,是能够区分高速道路和一般道路的车道的宽度。
40.另外,判定部423可以决定在从道路状态确定部422取得的距车辆s规定范围内(例如10米以内)的车辆或人的密度为阈值以上的情况下比在车辆或人的密度小于阈值的情况下短的判定期间。车辆或人的密度的阈值以及判定部423决定的判定期间例如是作为安全上没有问题的水平而通过实验预先确定的。
41.判定部423在判定为车辆s的驾驶员处于不注视前方状态的情况下,向警报部424通知驾驶员处于不注视前方状态。警报部424一旦从判定部423接收到驾驶员处于不注视前方状态的通知,则通知警报装置3发出警报。
42.《判定部423的操作》
43.图3是表示判定部423基于从道路状态确定部422取得的车道的宽度来设定判定期间的处理的流程图的图。道路状态确定部422从道路拍摄装置2取得车辆s行驶中的道路的图像(s11)。道路状态确定部422基于所取得的道路的图像,在将车辆s正在行驶的车道的宽度确定为道路的状态的同时,向判定部423通知车道的宽度(s12)。此外,道路状态确定部422可以将表示车道的宽度的数值通知给判定部423,也可以将表示车道的宽度的信息(例如“宽”或“窄”)通知给判定部423。
44.判定部423在所取得的车道的宽度为阈值(例如3.5米)以上的情况下(s13的是),设定为比车道的宽度小于阈值的情况下的判定期间长的第一判定期间(s14)。另一方面,判定部423在取得的车道的宽度小于阈值的情况下(s13的否),设定为比车道的宽度为阈值以上的情况下的判定期间短的第二判定期间(s15)。第一判定期间和第二判定期间例如是作为安全上没有问题的水平的判定期间而通过实验预先确定的期间。
45.通过道路状态确定部422和判定部423这样进行操作,判定部423在车道的宽度大的情况下能够将判定期间设定得较长。其结果,例如在车辆s在直线道路多且没有人的高速道路上行驶的情况下,安全驾驶判定装置4能够抑制对驾驶员的脸部朝向的角度的变化灵敏反应而使警报装置3错误地发出警报。
46.图4是表示判定部423基于从道路状态确定部422取得的人或车辆的密度来设定判定期间的处理的流程图的图。道路状态确定部422从道路拍摄装置2取得车辆s行驶中的道路的图像(s21)。道路状态确定部422基于所取得的道路的图像,将车辆s正在行驶的道路中的距车辆s规定范围内的人或与车辆s不同的车辆的密度确定为道路的状态,同时向判定部423通知人或车辆的密度(s22)。
47.道路状态确定部422所确定的距车辆s规定范围内的人的密度例如是在车辆s的周围10米以内能够检测出的人的数量。道路状态确定部422所确定的距车辆s规定范围内的车辆的密度例如是在车辆s的前后及左右检测出的、与车辆s不同的车辆的数量。
48.判定部423在所取得的人或车辆的密度小于阈值的情况下(s23的是),设定为比人
或车辆的密度为阈值以上的情况下的判定期间长的第一判定期间(s24)。另一方面,判定部423在取得的人或车辆的密度为阈值以上的情况下(s23的否),设定为比人或车辆的密度小于阈值的情况下的判定期间短的第二判定期间(s25)。阈值、第一判定期间以及第二判定期间例如是作为安全上没有问题的水平通过实验预先确定的值。此外,图4中的第一判定期间及第二判定期间可以与图3中的第一判定期间及第二判定期间相同,也可以不同。
49.通过道路状态确定部422和判定部423这样进行操作,在车辆s周围的车辆或人多的情况下,判定部423能够将判定期间设定得较短。其结果,例如在车辆s正在车辆或人多的一般道路上行驶的情况下,安全驾驶判定装置4能够对驾驶员的脸部朝向的角度的变化灵敏反应并使警报装置3发出警报。
50.另外,判定部423也可以组合图3所示的基于车辆s行驶中的车道的宽度的判定和图4所示的基于距车辆s规定范围的车辆或人的密度的判定这两者。例如,即使从道路状态确定部422取得的车辆s的行驶中的车道的宽度小于阈值,如果从道路状态确定部422取得的距车辆s规定范围内的车辆或人的密度小于阈值,则判定部423也可以将判定期间设定得较长。另一方面,例如,即使从道路状态确定部422取得的车辆s的行驶中的车道的宽度在阈值以上,如果从道路状态确定部422取得的距车辆s规定范围内的车辆或人的密度在阈值以上,则判定部423也可以将判定期间设定得较短。
51.通过判定部423这样进行操作,例如即使在车辆s行驶中的车道的宽度小的情况下,在周围车辆或人少的情况下,安全驾驶判定装置4也能够抑制对驾驶员的脸部朝向的变化灵敏反应而使警报装置3发出警报。另一方面,例如即使在车辆s行驶中的车道的宽度大的情况下,在周围车辆或人多的情况下,安全驾驶判定装置4也能够对驾驶员的脸部朝向的变化灵敏反应并使警报装置3发出警报。
52.在以上的操作中,判定部423也可以在车辆s在直线道路多且没有人的高速道路上行驶的情况下,与车辆s在一般道路上行驶的情况相比,延长判定驾驶员是否处于不注视前方状态的判定期间。其结果,安全驾驶判定装置4能够抑制对驾驶员的脸部朝向的变化灵敏反应而使警报装置3发出警报。另一方面,判定部423例如在车辆s在人多的一般道路上行驶的情况下,缩短判定驾驶员是否处于不注视前方状态的判定期间。其结果,安全驾驶判定装置4能够对驾驶员的脸部朝向的变化灵敏反应并使警报装置3发出警报。
53.图5是表示具有外部装置5的车辆s的构成的图。车辆s在具有外部装置5这一点上与图1所示的车辆s不同,在其他点上相同。外部装置5例如是汽车导航系统。外部装置5具有确定车辆s正在行驶的位置的位置确定部。
54.外部装置5存储有与时刻、道路的位置以及距车辆s规定范围内的车辆或人的密度相关联的道路状态信息。道路状态确定部422在车辆s正在行驶的状态下,将行驶中的时刻通知给外部装置5。外部装置5从外部装置5存储的道路状态信息中确定与从道路状态确定部422取得的行驶中的时刻和外部装置5具有的位置确定部所确定的位置信息相关联的距车辆s规定范围内的车辆或人的密度,并通知给道路状态确定部422。道路状态确定部422将从外部装置5取得的、距车辆s规定范围内的车辆或人的密度通知给判定部423。
55.通过外部装置5和道路状态确定部422这样进行操作,判定部423能够基于与车辆s行驶中的时刻和位置相关联的道路状态信息来设定判定期间。具体地,判定部423例如能够在清晨等道路上人少的时刻将判定期间设定得较长,在白天等道路上人多的时刻将判定时
间设定得较短。其结果,例如在道路上人少的清晨等时刻,安全驾驶判定装置4能够抑制对驾驶员的脸部朝向的变化灵敏反应而使警报装置3发出警报。另一方面,在道路上人多的白天等时刻,安全驾驶判定装置4能够对驾驶员的脸部朝向的变化灵敏反应并使警报装置3发出警报。
56.图6是表示具有操作受理部425的车辆s的构成的图。车辆s在具有操作受理部425这一点上与图5所示的车辆s不同,在其他点上相同。操作受理部425接受用于对车辆s行驶中的道路的每个状态设定判定期间的长度的设定操作。操作受理部425例如经由外部装置5具有的操作画面来接受驾驶员设定的、针对车辆s正在行驶的道路的每个状态的判定期间的长度。操作受理部425将接受的判定期间通知给判定部423。
57.判定部423结合道路状态确定部422确定的道路的状况将判定期间决定为操作受理部425接受的设定操作所表示的长度。通过判定部423和操作受理部425这样进行操作,判定部423能够基于驾驶员各自的驾驶条件判定是否处于不注视前方状态。其结果,安全驾驶判定装置4能够在与驾驶员各自的驾驶条件对应的同时,基于车辆s正在行驶的道路的状态使警报装置3发出警报。
58.《安全驾驶判定装置4的效果》
59.如上所述,控制部42具有:角度值计算部421,计算车辆s的驾驶员的角度值;道路状态确定部422,确定车辆s行驶中的车道的宽度等道路的状态;以及判定部423,基于计算出的角度值来判定驾驶员是否处于不注视前方状态。判定部423基于从道路状态确定部422取得的道路的状态,设定用于判定驾驶员是否处于不注视前方状态的判定期间。
60.其结果,安全驾驶判定装置4例如在车道的宽度窄的情况下,与车道的宽度宽的情况相比,对驾驶员的脸部朝向的变化灵敏反应并使警报装置3发出警报。另外,安全驾驶判定装置4在距车辆s规定范围的人或车辆的密度高的情况下,与人或车辆的密度低的情况相比,对驾驶员的脸部朝向的变化灵敏反应并使警报装置3发出警报。因此,安全驾驶判定装置4无论道路的状态如何都能够适当判定驾驶员是否处于不注视前方状态。
61.在上文中,使用实施方式说明了本发明,但本发明的技术范围不限于上述实施方式记载的范围,在本发明的主旨的范围内可以进行各种变形和变更。例如,装置的全部或一部分可以以任意的单位在功能上或物理上分散、合并而构成。另外,通过多个实施方式的任意组合而产生的新实施方式也包括在本发明的实施方式中。由组合而产生的新实施方式的效果兼具原先的实施方式的效果。
62.附图标记
63.1 驾驶员拍摄装置
64.2 道路拍摄装置
65.3 警报装置
66.4 安全驾驶判定装置
67.5 外部装置
68.41 存储部
69.42 控制部
70.421 角度值计算部
71.422 道路状态确定部
72.423 判定部
73.424 警报部
74.425 操作受理部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1