船舶行为的语义计算方法及装置
1.本发明属于船舶行为识别技术领域,具体涉及一种船舶行为的语义计算方法及装置。
背景技术:
2.近年来,随着大数据,人工智能等技术的兴起,极大地促进了交通科学技术的发展,水上交通作为国内外交通科学领域的重要领域,数据科学,人工智能科学等技术也得到了广泛的应用。自动识别系统(ais),船舶交通服务(vts)等监管设备的使用为水上交通多源异构信息数据的采集、分析和判断提供了良好的支撑,然而,随着多源异构数据的不断丰富,数据量的不断积累,计算机处理多源异构交通数据的能力已经逐渐成为当前海事科学发展的瓶颈,因此需要一种新的数据处理,挖掘和融合的方法。
3.语义建模作为一种从人类认知层面进行建模的方法已经逐渐成为当前解决这一问题的重点研究方向,因此有必要提出一种基于语义的方法研究海事领域中存在的问题。船舶行为作为海事领域科学研究中一个重要的方向,对船舶行为从知识层面进行结构化,语义化计算和表达有利于水上监管人员,驾引人员更为深入和高效地理解船舶行为,保障水上交通安全。
4.目前,有关船舶行为识别的主要方法有基于机器学习的方法和基于规则的方法,但是以上两种方法存在以下不足:第一,基于机器学习的方法主要从数据层面进行船舶行为的建模,但是船舶行为的形成还会受到周围航行环境的影响,因此仅仅从数据层面难以对船舶的行为进行准确科学的表达;第二,基于规则的方法能够考虑船舶航行环境对船舶行为的影响,但是这类方法主要通过专家知识建立相应的船舶行为规则,存在行为的粒度划分不一致的问题,因此只能定义有限的船舶行为集合。综上,如何基于海量的数据建立符合人类认知的船舶行为计算方法是当前船舶行为识别所面临的一个问题。
技术实现要素:
5.针对现有技术中存在的问题,本发明提供一种船舶行为的语义计算方法及装置,以解决从人类认知层面结构化建模、表达和识别船舶行为的问题。
6.为实现上述目的,本发明提供了一种船舶行为的语义计算方法,包括:
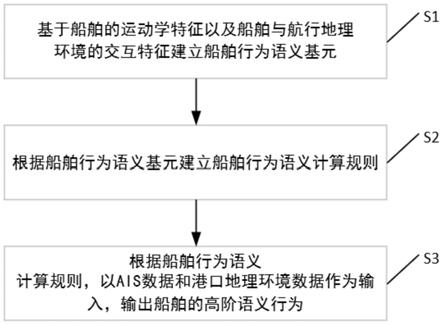
7.基于船舶的运动学特征以及船舶与航行环境的交互特征建立船舶行为语义基元;
8.根据船舶行为语义基元建立船舶行为语义计算规则;
9.根据船舶行为语义计算规则,以ais数据和港口地理环境数据作为输入,输出为船舶的高阶语义行为。
10.进一步地,船舶运动学特征包含船舶的航向变化特征以及航速变化特征。船舶的航向特征是指船舶受制于船舶的舵装置的约束,只能够做左转向,右转向和直行的航向变化。船舶的航速特征包含加速、减速、匀速以及停留四种。
11.船舶与航行地理环境的交互特征主要为拓扑特征,即船舶被抽象为点,航行地理
环境被抽象为点线面三种几何特征,船舶轨迹抽象为一条线,根据拓扑交互的不同特征确定不同的交互语义基元。
12.进一步地,船舶行为的语义基元是指能表达船舶语义行为的最小单元,上述航向变化特征、航速变化特征以及拓扑特征均可视为船舶行为的语义基元。
13.进一步地,船舶语义行为的计算规则是指以船舶的语义基元为运算对象,以逻辑符号作为运算符,构建船舶语义行为计算规则,进而计算得到更为高阶船舶语义行为。
14.本发明还提供了一种船舶行为的语义计算装置,该装置包括电源,ais数据接口,用户接口,电路板,数据处理模块,语义处理模块和语义计算模块;电源为装置供电,ais数据接口接入外源ais数据,电路板安装各模块,数据处理模块对输入的数据进行预处理,语义处理模块对预处理好的数据进行语义处理,获取语义基元,语义计算模块根据如上语义计算规则对语义基元进行计算,得到船舶高阶语义行为,用户接口输出船舶高阶语义行为。
15.本发明与现有技术相比,具有以下优点及有益效果:
16.本发明能够从语义层次识别和表达船舶行为,大大提高水上交通监管效率。
附图说明
17.图1为本发明提供的船舶行为语义计算方法的流程示意图;
18.图2为本发明提供的船舶行为运动语义基元示意图;
19.图3为本发明提供的船舶与航行地理环境的拓扑交互语义基元示意图;
20.图4为本发明提供的船舶语义行为的计算装置示意图。
具体实施方式
21.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
22.本发明实施例提供一种船舶行为的语义计算方法,结合图1来看,图1为本发明提供的船舶行为语义计算方法的流程示意图,该方法包括如下步骤:
23.步骤s1:基于船舶的运动学特征以及船舶与航行地理环境的交互特征建立船舶行为语义基元;
24.步骤s2:根据船舶行为语义基元建立船舶行为语义计算规则;船舶行为语义计算规则是指基于已有的船舶行为语义基元,利用逻辑计算符号建立高阶船舶语义行为计算规则;船舶高阶语义行为是指船舶行为语义基元在语义计算规则下所计算得到的船舶语义行为;
25.步骤s3:根据船舶行为语义计算规则,以ais数据和港口地理环境数据作为输入,输出船舶的高阶语义行为。
26.步骤s1中,船舶的运动学特征是指船舶的航向变化特征和航速变化特征。对应地,船舶行为语义基元包括运动基元和拓扑基元;运动基元,运动基元包含航向变化基元和航速变化基元,拓扑基元是指因船舶与航行地理环境间的拓扑交互特征不同而产生不同的拓扑基元。
27.具体地,船舶的航向变化特征考虑船舶的舵装置的特点,主要特征分为转向(turning)和直行(gostraight)2种行为语义基元,其中,转向分为左转向(turnport)和右转向(turnstarboard)2种。图2为本发明提供的船舶行为运动语义基元示意图。
28.更具体地,转向的判断是将前后两个轨迹点之间航向值(cog)的变化率的绝对值|δci|与根据航海经验确定的转向阈值δ进行比较。
[0029][0030]
考虑到船舶航行在海上受到风流等外界因素的干扰,并不能总是保持恒定的航向,但是从航海经验来看,只要航向变化保持在一定的范围内则认为是保持直行。
[0031]
如果前后两个轨迹点之间的航向值的变化率绝对值大于转向阈值,若偏离原航向的右边,则为右转向,若偏离原航向的左边,则为左转向,变化率的绝对值小于阈值则为直行。
[0032]
具体地,船舶的航速变化特征主要分为停留(stay)语义基元和移动(move)语义基元,移动可分为加速(accelerate),减速(decelerate),匀速(keepspeed)3种语义基元。
[0033]
更具体地,移动的判断是将前后两个轨迹点之间的航速值(sog)的变化率|δsi|与根据航海经验确定的变速阈值ε进行比较。
[0034][0035]
停留的判断是轨迹点的航速值低于一个速度阈值α,并且第一个停留点到最后一个停留点之间的时间差必须大于一个时间阈值τ,即可认定为停留。
[0036]
进一步地,将船舶的速度变化特征或航向变化特征保持不变的行为称为原子行为(atom behavior,atomb)。
[0037]
具体地,船舶与航行地理环境的交互特征主要是船舶与航行地理环境之间的拓扑交互。结合图3来看,图3为本发明提供的船舶与周围航行地理环境的拓扑交互语义基元示意图。将船舶抽象为点,船舶航行所产生的轨迹抽象为线,船舶所航行的地理环境根据其几何特征的不同抽象为点线面三种,在原有的基于维数拓展的9交模型(de-9im)的基础上,开发出船舶行为领域的空间拓扑表达。
[0038]
船舶与航行地理环境之间的拓扑关系可分为点-线关系,点-面关系,线-线关系和线面关系,将不同的拓扑关系视为一种拓扑语义基元,一共有15种语义基元。
[0039]
点-线关系中,如图3(a)和图3(b)所示,船舶为点,航行地理区域的边界以及港口内线状对象视为线,船舶不在线上(pl1)和在线上(pl2)是两种不同的语义,因此分为两种交互语义基元。
[0040]
点-面关系中,如图3(h)、图3(i)和图3(j)所示,航行地理区域可视为面,存在船舶在区域内(pa1),船舶在区域外(pa2),船舶在区域边界线上(pa3)三种拓扑交互语义基元。
[0041]
线-线关系中,如图3(c)、图3(d)、图3(e)、图3(f)和图3(g)所示,船舶轨迹为线,航行地理区域的边界以及港口内线状对象视为线,船舶轨迹与航行环境之间不同的交互特征会随着不同的拓扑交互特征而不同。
[0042]
图3(c)表示船舶穿过了航行地理区域的边界线或港口内线状对象,表示船舶可能是进入或离开某一区域,也可能是横穿了港口内某一条特定的线(ll1)。
[0043]
图3(d)中所表达的是具有转向原子行为的船舶和地理环境线对象之间拓扑交互而产生的语义行为(ll2),其原子行为的开始点和结束点均在地理环境线对象上。
[0044]
在实际的港口规划中,泊位的区域总是使用两个点的经纬度表示,因此可将泊位抽象为一个线状对象(线段),因此图3(e)中的拓扑交互所表达的为船舶轨迹段一端在地理环境线状对象上,另一端不在地理环境线状对象上的语义行为(ll3)。
[0045]
图3(f)所要表达的语义含义为船舶轨迹与某一水域边界或地理环境线状对象没有交集的语义行为(ll4)。
[0046]
图3(g)所表达的是船舶可能沿着某一地理环境线状对象行驶的语义行为,也可能是船舶在泊位线上移动的语义行为(ll5)。
[0047]
线面关系中,如图3(k)、图3(l)、图3(m)、图3(n)和图3(o)所示,船舶轨迹和航行地理区域之间不同的拓扑关系也会导致语义的变化。
[0048]
图3(k)中表达船舶横穿了某一面状区域(la1)。
[0049]
图3(l)中表达了船舶靠近某一地理区域航行,部分轨迹会与区域边界相切(la2),而图3(m)表达了船舶在地理区域外航行(la3)。
[0050]
图3(n)表示船舶驶进或驶出某一地理区域的语义行为(la4)。
[0051]
图3(o)表示了船舶在某一地理区域内航行的语义行为(la5)。
[0052]
步骤s2中,基于船舶行为的语义基元建立相应的语义计算规则是指以船舶行为的语义基元作为运算对象,使用逻辑符号建立语义基元之间的关系,进而表达出更为高阶的船舶语义行为。
[0053]
逻辑符号使用∩表示,其含义为并且,即两边条件同时满足,该算式才算成立,且得到相应的高级语义行为。
[0054]
以语义基元为基础,使用逻辑符号关联各语义基元即可得到更为高阶的船舶语义行为。以下给出一些具体的实施例:
[0055]
码头停泊和锚泊可表示为:
[0056][0057]
靠泊和离泊行为可表示为:
[0058][0059]
驶入和驶出行为可表示为:
[0060][0061]
横越行为可表示为:
[0062]
[0063]
航经行为可表示为:
[0064][0065]
式中,traj表示船舶轨迹,i表示船舶,用唯一的标识符mmsi表示,ep表示原子行为的开始点,bp表示原子行为的结束点。
[0066]
步骤s3中,ais数据内容主要包括船舶的唯一标识符mmsi,时间戳数据,经度坐标,纬度坐标,航向数据,航速数据。
[0067]
港口地理环境数据主要包括港口各主要功能区域的顶点经纬度坐标。
[0068]
本发明还提供了一种船舶语义行为计算装置,如图4所示,该装置包括ais数据接口,电源,数据处理模块,语义处理模块和语义计算模块,电路板和用户接口。
[0069]
ais数据接口将外源ais数据接入装置。
[0070]
电路板上装置数据处理模块,语义处理模块和语义计算模块。
[0071]
数据处理模块对输入进来的ais数据进行数据预处理工作,包括数据去噪,去重,插值等操作。
[0072]
语义处理模块是指采用上述的语义基元识别算法对经过预处理的数据进行语义处理,获取语义基元。
[0073]
语义计算基元模块以语义基元作为输入,经过预先定义好的语义计算规则,输出高阶的船舶语义行为。
[0074]
电源用于为上述装置的各个电路或器件供电。
[0075]
用户接口用于输出船舶的高阶语义行为。
[0076]
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1