一种基于自适应动态图卷积的交通流预测方法及系统
1.本发明涉及交通预测领域,尤其涉及一种基于自适应动态图卷积的交通流预测方法及系统。
背景技术:
2.交通流预测旨在基于历史交通观测对路网中未来的交通流状况(如交通速度、交通量等)进行预测。准确的交通预测是构建智能交通系统的重要基础,对交通时间估计、路线规划、交通灯管控等各类下游应用具有重要意义。由于城市交通网络具有高度的动态性及复杂的时空依赖性,进行准确的交通预测仍是一个挑战。
3.传统统计信号处理方法如arima模型、支持向量回归(svr)模型将交通预测用单变量时间信号回归的方式建模。它们依赖于信号平稳假设,且忽略交通节点间的相互关系,难以捕捉真实世界复杂的交通模式。随着深度学习技术的发展,卷积神经网络等模型涌现,但其仅能以欧式空间栅格化的方式处理空间信息,无法处理不规则的交通网络拓扑关系。
技术实现要素:
4.为了解决上述技术问题,本发明的目的是提供一种基于自适应动态图卷积的交通流预测方法及系统,能够提高交通流预测的准确性。
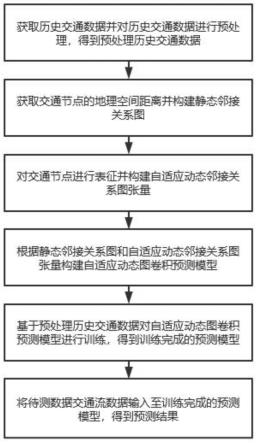
5.本发明所采用的第一技术方案是:一种基于自适应动态图卷积的交通流预测方法,包括以下步骤:
6.获取历史交通数据并对历史交通数据进行预处理,得到预处理历史交通数据;
7.获取交通节点的地理空间距离并构建静态邻接关系图;
8.对交通节点进行表征并构建自适应动态邻接关系图张量;
9.根据静态邻接关系图和自适应动态邻接关系图张量构建自适应动态图卷积预测模型;
10.基于预处理历史交通数据对自适应动态图卷积预测模型进行训练,得到训练完成的预测模型;
11.将待测数据交通流数据输入至训练完成的预测模型,得到预测结果。
12.进一步,所述获取历史交通数据并对历史交通数据进行预处理,得到预处理历史交通数据这一步骤,其具体包括:
13.设定时间步间隔、最大历史观测时间步数和最大预测时间步数;
14.根据时间步间隔将一天划分等长时段,得到时段索引序列;
15.根据时间步间隔、最大历史观测时间步数和最大预测时间步数对历史交通数据进行滑窗切片,得到交通流特征序列;
16.根据交通流特征和时段索引序列构建特征索引对,得到预处理历史交通数据。
17.进一步,所述静态邻接关系图的表达式如下:
[0018][0019]
上式中,静态邻接关系图,表示交通节点vi与vj的地理空间距离,σ表示各节点间距离的标准差。
[0020]
进一步,所述对交通节点进行表征并构建自适应动态邻接关系图张量这一步骤,其具体包括:
[0021]
设定交通节点和各时段的表征维度,并构造交通节点表征矩阵和时段表征矩阵;
[0022]
基于张量合成方法,根据交通节点表征矩阵和时段表征矩阵计算张量;
[0023]
对张量进行非线性映射并作归一化处理,得到自适应动态邻接关系图张量。
[0024]
进一步,所述根据静态邻接关系图和自适应动态邻接关系图张量构建自适应动态图卷积预测模型这一步骤,其具体包括:
[0025]
根据自适应动态邻接关系图张量获取自适应动态邻接关系图;
[0026]
构建自适应动态图卷积模块并采用静态邻接关系图与动态邻接关系图进行图卷积操作;
[0027]
将自适应动态图卷积模块嵌入门控循环单元并替换全连接计算,得到含自适应动态图卷积的门控循环单元;
[0028]
基于含自适应动态图卷积的门控循环单元构建组成编码器-解码器结构的模型,得到自适应动态图卷积预测模型。
[0029]
进一步,所述基于预处理历史交通数据对自适应动态图卷积预测模型进行训练,得到训练完成的预测模型这一步骤,其具体包括:
[0030]
基于计划采样方式,以概率ε使用历史交通流特征真实值为输入,以1-ε的概率使用前一时间步的输出估计值作为输入,对自适应动态图卷积预测模型中的解码器进行训练,得到训练完成的预测模型。
[0031]
本发明所采用的第二技术方案是:一种基于自适应动态图卷积的交通流预测系统,包括:
[0032]
预处理模块,用于获取历史交通数据并对历史交通数据进行预处理,得到预处理历史交通数据;
[0033]
第一构建模块,用于获取交通节点的地理空间距离并构建静态邻接关系图;
[0034]
第二构建模块,用于对交通节点进行表征并构建自适应动态邻接关系图张量;
[0035]
模型构建模块,用于根据静态邻接关系图和自适应动态邻接关系图张量构建自适应动态图卷积预测模型;
[0036]
训练模块,基于预处理历史交通数据对自适应动态图卷积预测模型进行训练,得到训练完成的预测模型;
[0037]
预测模块,用于将待测数据交通流数据输入至训练完成的预测模型,得到预测结果。
[0038]
本发明方法及系统的有益效果是:本发明通过在不同时间点采用不同的自适应邻接图对交通节点表征进行动态的图卷积,挖掘交通网络复杂的动态模式,提高了交通流预
测的准确性,另外,分别设置可训练的节点表征矩阵与时段表征矩阵,以张量合成的方式生成不同时段的节点动态邻接关系图,避免了在每一个时段分别定义一种节点表征,在交通节点数量巨大时有效降低了预测模型的参数量。
附图说明
[0039]
图1是本发明一种基于自适应动态图卷积的交通流预测方法的步骤流程图;
[0040]
图2是本发明一种基于自适应动态图卷积的交通流预测系统的结构框图;
[0041]
图3是本发明具体实施自适应动态图卷积预测模型的示意图;
[0042]
图4是本发明方法和现有典型的基于图卷积的交通预测方法的预测性能比较图。
具体实施方式
[0043]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0044]
如图1所示,本发明提供了一种基于自适应动态图卷积的交通流预测方法,该方法包括以下步骤:
[0045]
s1、获取历史交通数据并对历史交通数据进行预处理,得到预处理历史交通数据;
[0046]
s1.1、设定时间步间隔、最大历史观测时间步数和最大预测时间步数;
[0047]
具体地,设定时间步间隔δt为5分钟,设定最大历史观测时间步数p=12(即1小时时长),最大预测时间步数q=12(即1小时时长);
[0048]
s1.2、根据时间步间隔将一天划分等长时段,得到时段索引序列;
[0049]
具体地,将一天内的按照δt为5分钟划分为l=288个等长的时段,各时段在一天中的索引l分别对应为0,1,
…
,287。
[0050]
s1.3、根据时间步间隔、最大历史观测时间步数和最大预测时间步数对历史交通数据进行滑窗切片,得到交通流特征序列;
[0051]
具体地,由所设定时间步间隔δt为5分钟、最大历史观测时间步数p=12,最大预测时间步数q=12,对历史交通流特征数据进行滑窗切片,每个窗口切片为长度24的交通流特征序列x
t-11
,
…
,x
t
,x
t+1
,
…
,x
t+12
,其中每个时刻的207为交通节点数量,1为每个节点的特征数(即仅采用交通速度一种特征),对应时段在一天中的索引分别为l
t-11
,
…
,l
t
,l
t+1
,
…
,l
t+12
;
[0052]
s1.4、根据交通流特征和时段索引序列构建特征索引对,得到预处理历史交通数据。
[0053]
具体地,组合交通流特征序列及对应的时段索引序列为“交通特征-时段索引对”序列,得到预处理的历史交通流数据样本。
[0054]
单个样本的形式为[(x
t-11
,l
t-11
),
…
,(x
t
,l
t
),(x
t+1
,l
t+1
),
…
,(x
t+12
,l
t+12
)]的长度为24的序列。
[0055]
s2、获取交通节点的地理空间距离并构建静态邻接关系图;
[0056]
具体地,采用高斯核函数的形式计算交通节点邻近度得到静态邻接关系图,表达式如下:
[0057][0058]
上式中,表示交通节点vi与vj的地理空间距离,σ表示各节点间距离的标准差。
[0059]
s3、对交通节点进行表征并构建自适应动态邻接关系图张量;
[0060]
s3.1、设定交通节点和各时段的表征维度,并构造交通节点表征矩阵和时段表征矩阵;
[0061]
具体地,设定交通节点表征及一天中各时段表征的维度d=30,依此构造源端交通节点表征矩阵终端交通节点表征矩阵一天中各时段表征矩阵一天中各时段表征矩阵核张量es,e
t
,eo,c随机初始化;
[0062]
s3.2、基于张量合成方法,根据交通节点表征矩阵和时段表征矩阵计算张量;
[0063]
具体地,根据es,e
t
,eo,c,采用张量合成的方式计算得张量计算表达式如下:
[0064]ad
=c
×1e
t
×2es×3ee[0065]
s3.3、对张量进行非线性映射并作归一化处理,得到自适应动态邻接关系图张量。
[0066]
具体地,对ad进行非线性映射并作归一化处理,得最终交通节点动态邻接关系图张量计算表达式如下:
[0067][0068]
上式中,非线性映射采用leakyrelu函数,softmax函数对张量的最后一个维度进行归一化;
[0069]
s4、根据静态邻接关系图和自适应动态邻接关系图张量构建自适应动态图卷积预测模型;
[0070]
s4.1、根据自适应动态邻接关系图张量获取自适应动态邻接关系图;
[0071]
具体地,节点动态邻接关系图张量在其第一个维度的第l个切片的含义为在一天中第l个时段的交通节点动态邻接关系图。
[0072]
s4.2、构建自适应动态图卷积模块dgconv(
·
)并采用静态邻接关系图与动态邻接关系图几何进行图卷积操作,采用的图卷积阶数k=2;
[0073]
具体地,计算公式为:
[0074][0075]
上式中,h
in
,h
out
分别为交通节点的输入表征及自适应图卷积模块的输出表征,k为图卷积阶数,df为静态邻接关系图as的度矩阵,db为as的转置矩阵的度矩阵,为一天中第l个时段对应的动态邻接关系图,w均为可训练权重矩阵。
[0076]
s4.3、将自适应动态图卷积模块嵌入门控循环单元并替换全连接计算,得到含自适应动态图卷积的门控循环单元;
[0077]
具体地,将dgconv(
·
)嵌入门控循环单元gru替换其中的全连接计算,得含自适应动态图卷积的gru单元;即,对于时间步t的gru单元,依照如下表达式进行计算:
[0078][0079][0080][0081]ht
=u
t
⊙ht-1
+(1-u
t
)
⊙ct
,
[0082]
上式中,x
t
、h
t
分别为当前时间步t的输入交通流特征、输出隐藏状态,h
t-1
为前一时间步的隐藏状态;l
t
为输入样本中与交通流特征x
t
对应的一天中时段索引,为在其第一个维度的第l
t
个切片;σ(
·
)表示sigmoid函数,||代表矩阵拼接操作,
⊙
代表矩阵hadamard积操作。
[0083]
s4.4、基于含自适应动态图卷积的门控循环单元构建组成编码器-解码器结构的模型,得到自适应动态图卷积预测模型。
[0084]
具体地,采用gru编码器长度与p相等为12,gru解码器长度与q相等为12,编码器-解码器结构层数为2,使用该含自适应动态图卷积的gru单元构成gru编码器-解码器预测模型,模型结构示意图参照图3。
[0085]
s5、基于预处理历史交通数据对自适应动态图卷积预测模型进行训练,得到训练完成的预测模型;
[0086]
基于计划采样方式,以概率ε使用历史交通流特征真实值为输入,以1-ε的概率使用前一时间步的输出估计值作为输入,对自适应动态图卷积预测模型中的解码器进行训练,得到训练完成的预测模型。
[0087]
具体地,训练模型时每个样本中序列的前12个“交通特征-时段索引对”输入到模型中的编码器,后12个“交通特征-时段索引对”输入到模型中的解码器;采用最小化平均绝对误差(mae)准则;采用adam优化器;学习率起始值为0.01,在训练第20、30、40、50回合时以0.1的比率衰减;训练过程中第i次迭代时模型中的gru解码器的计划采样概率εi由以下函数计算得到:
[0088][0089]
其中τ取2000;
[0090]
基于模型输出与真值误差进行训练。模型采用的是gru编码器-解码器结构:(1)训练的时候,产生的输入序列其实对应于编码器与解码器的两段。(2)编码器输入固定用第一段的输入,编码器只在最后一步的隐藏向量会输入到编码器中作为编码器第一步的初始隐藏向量,但没有模型的输出,解码器才有输出。(3)训练的时候,解码器每一步输入依概率进行选择,要么输入(1)所述输入序列第二段中对应于当前时间步的值,要么输入的是解码器前一个时间步的输出预测/估计值。
[0091]
s6、将待测数据交通流数据输入至训练完成的预测模型,得到预测结果。
[0092]
下面结合图4对本发明的交通流预测性能作进一步描述:
[0093]
将本发明方法与现有典型的基于图卷积的交通预测方法的预测性能进行比较,所对比的方法包括:dcrnn(扩散卷积递归神经网络)模型、stgcn(时空图卷积网络)模型、graph-wavenet模型。其中,dcrnn模型采用固定的静态距离邻接关系图进行扩散图卷积,并结合编码器-解码器结构进行交通流预测;stgcn模型采用固定的静态距离邻接关系图以切比雪夫多项式的形式进行图卷积,并与1d-cnn时域卷积结合进行交通流预测;graph-wavenet模型在stgcn模型基础上,增加全时段共享的静态自适应邻接关系图进行图卷积,并结合多种尺度的空洞时域卷积进行交通流预测。附图4为预测性能对比图,展示了各方法对未来15分钟(3步)、30分钟(6步)、60分钟(12步)交通流预测的误差;其中mae代表平均绝对误差,rmse代表均方根误差,mape代表平均绝对百分比误差。可见本发明通过在不同时间点采用不同的自适应邻接图进行动态的图卷积,相比于基于固定静态邻接关系图与自适应静态邻接关系图的方法,获得了整体上更优的交通流预测准确性。
[0094]
如图2所示,一种基于自适应动态图卷积的交通流预测系统,包括:
[0095]
预处理模块,用于获取历史交通数据并对历史交通数据进行预处理,得到预处理历史交通数据;
[0096]
第一构建模块,用于获取交通节点的地理空间距离并构建静态邻接关系图;
[0097]
第二构建模块,用于对交通节点进行表征并构建自适应动态邻接关系图张量;
[0098]
模型构建模块,用于根据静态邻接关系图和自适应动态邻接关系图张量构建自适应动态图卷积预测模型;
[0099]
训练模块,基于预处理历史交通数据对自适应动态图卷积预测模型进行训练,得到训练完成的预测模型;
[0100]
预测模块,用于将待测数据交通流数据输入至训练完成的预测模型,得到预测结果。
[0101]
上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0102]
一种基于自适应动态图卷积的交通流预测装置:
[0103]
至少一个处理器;
[0104]
至少一个存储器,用于存储至少一个程序;
[0105]
当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上所述一种基于自适应动态图卷积的交通流预测方法。
[0106]
上述方法实施例中的内容均适用于本装置实施例中,本装置实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0107]
一种存储介质,其中存储有处理器可执行的指令,其特征在于:所述处理器可执行的指令在由处理器执行时用于实现如上所述一种基于自适应动态图卷积的交通流预测方法。
[0108]
上述方法实施例中的内容均适用于本存储介质实施例中,本存储介质实施例所具
体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0109]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1