用于受基础设施支持辅助机动车的和用于引导机动车的方法和系统、设备和存储介质与流程
1.本发明涉及用于受基础设施支持地辅助机动车的一种方法和一种系统。本发明此外还涉及用于至少部分自动化地引导机动车的一种方法和一种系统。本发明此外还涉及一种计算机程序以及一种机器可读的存储介质以及一种设备。
背景技术:
2.公开文献de 10 2012 215 343 a1公开了一种用于执行车辆的安全性功能的方法。
3.公开文献de 10 2014 219 742 a1公开了一种车辆系统。
技术实现要素:
4.本发明所基于的任务视为提供一种用于高效地受基础设施支持地辅助机动车的方案。
5.本发明所基于的任务还视为提供一种高效地至少部分自动化地引导机动车的方案。
6.所述各个任务借助本发明的各个主题来解决。本发明的有利构型能够通过在优选实施方式中所列举的措施实现。
7.根据第一方面,提供一种用于受基础设施支持地辅助机动车的方法,该方法包括以下步骤:
8.接收环境信号,所述环境信号代表该机动车的周围环境,
9.处理所述环境信号,以便探测该机动车的该周围环境中的对象,所述对象例如是物体、空地、栅格信息、运动模式等。
10.求取对象列表,所述对象列表代表所探测到的对象,
11.求取是否发生了预确定的事件,
12.根据是否发生了预确定的事件来向该机动车发送所述对象列表,以便受基础设施支持地辅助该机动车。
13.根据第二方面,提供一种用于至少部分自动化地引导机动车的方法,该方法包括以下步骤:
14.接收消息,
15.求取该消息是以预确定的发送频率所发送的包括对象列表的心跳消息还是包括对象列表的紧急消息,其中,所述对象列表分别代表该机动车的一个周围环境,
16.其中,在接收到紧急消息的情况下,向机动车的驾驶员辅助系统发送“中断”和所述对象列表,该驾驶员辅助系统提供至少部分自动化的驾驶功能。
17.根据第三方面,提供一种设备,该设备设置为用于实施根据所述第一方面的和/或根据所述第二方面的方法的所有步骤。
18.根据第四方面,提供一种用于受基础设施支持地辅助机动车的系统,该系统包括设备和环境传感器单元,该设备设置为用于实施根据所述第一方面的方法的所有步骤,该环境传感器单元设置为用于检测该机动车的周围环境。
19.根据第五方面,提供一种用于至少部分自动化地引导机动车的系统,该系统包括设备和驾驶员辅助系统,该设备设置为用于实施根据所述第二方面的方法的所有步骤,所述驾驶员辅助系统设置为用于提供至少部分自动化的驾驶功能。
20.根据第六方面,提供一种计算机程序,该计算机程序包括指令,所述指令在通过计算机(例如通过根据所述第三方面的设备和/或通过根据所述第四方面的系统和/或通过根据所述第五方面的系统)执行计算机程序时促使该计算机实施根据所述第一方面的和/或根据所述第二方面的方法。
21.根据第七方面,提供一种机器可读的存储介质,在该存储介质上存储有根据所述第六方面的计算机程序。
22.本发明基于并且同时包括以下认识,即上述任务通过以下方式来解决:基于通过传感器对机动车的周围环境进行检测来探测该机动车的该周围环境中的对象,以便创建代表所探测到的对象的对象列表。此外设置,求取是否发生了预确定的事件。基于该求取的结果向该机动车发送所述对象列表,以便受基础设施支持地辅助该机动车。即,根据是否发生了预确定的事件来向该机动车发送所述对象列表。
23.因此能够有利地以高效的方式对预确定的事件的发生做出反应。例如设置,如果发生了预确定的事件,则直接地、即立即向该机动车发送所述对象列表。因此能够使机动车直接了解在其周围环境中存在的对象,从而能够基于该信息、即基于所述对象列表来高效地至少部分自动化地引导该机动车。基于该事件的类型,例如将所述对象列表经修改地以高优先级发送给车辆。
24.在本说明书的意义上的发送例如包括经由通信网络的发送,该通信网络例如是无线通信网络。
25.在本说明书的意义上的接收例如包括经由通信网络的接收,该通信网络例如是无线通信网络。
26.对象例如是物体、空地、栅格信息、运动模式等。
27.在此应注意的是,以下描述的实施方式的各个特征能够例如以任意组合成立。
28.在根据第一方面的方法的一种实施方式中提出,基于对象列表求取是否发生了预确定的事件。
29.由此,例如实现以下技术优点:能够高效地执行对是否发生了预确定的事件的求取。
30.按照根据第一方面的方法的一种实施方式提出,预确定的事件是从以下事件组中所选择的元素:探测到的对象的对象速度的变化大于或大于等于预确定的对象速度阈值、与旧对象列表相比所探测到的对象在所述对象列表中是新的。
31.由此例如实现以下技术优点:能够使用尤其适合的预确定的事件。
32.根据第一方面的方法的一种实施方式设置,以预确定的发送频率向机动车发送心跳消息,其中,对环境信号的接收包括以预确定的第一频率对第一环境信号的多次接收,该第一频率大于或大于等于该发送频率,其中,对环境信号的处理包括以该第一频率对第一
环境信号的多次处理,以便探测机动车的周围环境中的对象,其中,对对象列表的求取包括对第一对象列表的多次求取,其中,在预确定的事件未发生的情况下,在时间上的下一心跳消息包括最后所求取到的第一对象列表,其中,在预确定的事件发生的情况下,与预确定的发送频率无关地将紧急消息直接发送给机动车,该紧急消息包括当前所求取到的第一对象列表。
33.由此例如实现以下技术优点:与机动车通过在时间上的下一心跳消息才获得对象列表的情况相比,使机动车有更多的时间来对预确定的事件做出反应。
34.根据第一方面的方法的一种实施方式设置,以预确定的发送频率向机动车发送心跳消息,其中,对环境信号的接收包括以预确定的第一频率对第一环境信号的多次接收,该第一频率大于或大于等于发送频率,其中,对环境信号的处理包括以第一频率对第一环境信号的多次处理,以便探测机动车的周围环境中的对象,其中,对对象列表的求取包括对第一对象列表的多次求取,其中,对环境信号的接收包括以预确定的第二频率对第二环境信号的多次接收,该第二频率与该预确定的第一频率不同,其中,对环境信号的处理包括以第二频率对第二环境信号的多次处理,以便探测该机动车的周围环境中的对象,其中,对对象列表的求取包括对第二对象列表的多次求取,其中,在预确定的事件未发生的情况下,在时间上的下一心跳消息包括所求取到的第一和第二对象列表中的最后所已求取到的那个对象列表,其中,在预确定的事件发生的情况下,与所述预确定的发送频率无关地将紧急消息直接发送给该机动车,该紧急消息包括所求取到的第一和第二对象列表中的当前已求取到的那个对象列表。
35.由此例如实现以下技术优点:与机动车通过在时间上的下一心跳消息才获得对象列表的情况相比,机动车有更多的时间来对预确定的事件做出反应。
36.在根据第一方面的方法的一种实施方式中设置,该方法是计算机实现的方法。
37.在根据第二方面的方法的一种实施方式中设置,该方法是计算机实现的方法。
38.该方法的在技术上的功能性和特征以类似的方式由系统的相应的在技术上的功能性和特征得出,反之亦然。
39.表述“至少部分自动化地引导”包括以下情况中的一个或多个情况:受辅助的引导、部分自动化引导、高度自动化引导、全自动化引导。
40.受辅助的引导意味着,机动车的驾驶员持续地实施机动车的横向引导或者纵向引导。自动化地执行对应另一行驶任务(即控制机动车的纵向引导或者横向引导)。这因此意味着,在受辅助地引导机动车时,或者横向引导或者纵向引导被自动化地控制。
41.部分自动化的引导意味着,在特定状况下(例如:在高速公路上行驶、在停车场内行驶、超过对象、在通过车道标记特定的车道内行驶)和/或对于一定的时间段自动化地控制机动车的纵向引导和横向引导。机动车的驾驶员不必自行手动地控制机动车的纵向引导和横向引导。但驾驶员必须持续地监视对纵向引导和横向引导的自动化控制,以便在需要时能够手动地干预。驾驶员必须随时准备着完全接管机动车引导。
42.高度自动化引导意味着,对于在一定的时间段在特定状况下(例如:在高速公路上行驶、在停车场内行驶、超过对象、在通过车道标记特定的车道内行驶),自动化地控制机动车的纵向引导和横向引导。机动车的驾驶员不必自行地手动控制机动车的纵向引导和横向引导。驾驶员不必持续地监控对纵向引导和横向引导的自动化控制,以便在需要时能够手
动地干预。在需要时,自动化地向驾驶员输出接管请求以便接管对纵向引导和横向引导的控制,尤其是带有足够的时间余量地输出。因此,驾驶员必须潜在地能够接管对纵向引导和横向引导的控制。横向引导和纵向引导的自动化控制的极限被自动化地识别。在高度自动化的引导的情况下不能够实现在各种初始状况下自动化地达到风险最小的状态。
43.全自动化引导意味着,在特定状况下(例如:在高速公路上行驶、在停车场内行驶、超过对象、在通过车道标记特定的车道内行驶)自动化地控制机动车的纵向引导和横向引导。机动车的驾驶员不必自行地手动控制机动车的纵向引导和横向引导。驾驶员不必监控对纵向引导和横向引导的自动化控制,以便能够在需要时手动地干预。在对横向引导和纵向引导的自动化控制结束之前,自动化地进行对驾驶员发出请求用以接管行驶任务(对机动车的横向引导和纵向引导的控制),尤其是带有足够的时间余量地进行。如果驾驶员不接管驾驶任务,则自动化地返回到风险最小的状态中。自动化地识别对横向引导和纵向引导的自动化控制的极限。在所有状况下能够实现自动化地返回到风险最小的系统状态下。对纵向引导和横向引导的自动化控制的界限被自动化识别到。在任何状况下都能够实现自动化返回到风险最小的系统状态中。
44.在一种实施方式中设置,预确定的事件例如需要机动车直接做出反应。例如将该事件优先,和例如将目前对对象列表向机动车的按顺序发送中断,和例如向机动车发送关于该预确定的事件的信息,其中,例如使对对象列表的按顺序发送一直中断直至关于该预确定的事件的信息已被发送给机动车、即已完全地被传输。这例如意味着,在事件需要机动车直接做出反应的情况下,将该事件高度优先并中断正常信息传输的序列以便首先向机动车发送关于该事件的信息。
附图说明
45.在附图中示出并且在以下描述中更详细地阐述本发明的实施例。附图示出:
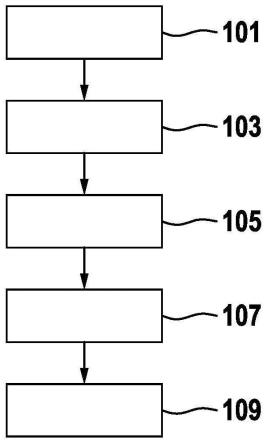
46.图1:根据第一方面的方法的流程图;
47.图2:根据第二方面的方法的流程图;
48.图3:根据第七方面的机器可读的存储介质;
49.图4:根据第四方面的第一系统的方框图;
50.图5:根据第四方面的第二系统的方框图;和
51.图6:根据第五方面的系统的方框图。
具体实施方式
52.图1示出用于受基础设施支持地辅助机动车的方法的流程图,该方法包括以下步骤:
53.接收101环境信号,所述环境信号代表该机动车的周围环境,
54.处理103所述环境信号,以便探测该机动车的该周围环境中的对象,
55.求取105对象列表,所述对象列表代表所探测到的对象,
56.求取107是否发生了预确定的事件,
57.根据是否发生了预确定的事件来向该机动车发送109所述对象列表,以便受基础设施支持地辅助该机动车。
58.图2示出用于至少部分自动化地引导机动车的方法的流程图,该方法包括以下步骤:
59.接收201消息,
60.求取203该消息是以预确定的发送频率所发送的包括对象列表的心跳消息还是包括对象列表的紧急消息,其中,所述对象列表分别代表该机动车的一个周围环境,
61.其中,在接收到紧急消息的情况下,向机动车的驾驶员辅助系统发送205“中断”和所述对象列表,该驾驶员辅助系统提供至少部分自动化的驾驶功能。
62.图3示出机器可读的存储介质301,在该存储介质上存储有计算机程序303。该计算机程序303包括指令,所述指令在通过计算机执行该计算机程序时促使该计算机实施根据第一方面的和/或根据第二方面的方法。
63.图4示出根据第一方面的第一系统401的方框图。系统401包括设备403,该设备设置为用于实施根据第一方面的方法的所有步骤。设备403包括处理装置405和通信单元407。第一系统401此外还包括环境传感器单元409,该环境传感器单元包括多个环境传感器(未示出),所述多个环境传感器在空间上分布地布置在基础设施内,该机动车在该基础设施内至少部分自动化地行驶。根据功能方框411,环境传感器单元409的这些环境传感器以预确定的检测速率、例如30hz来检测该机动车的周围环境并输出相应于该检测的环境信号,所述环境信号代表该机动车的该周围环境。
64.根据功能方框413,设备403以预确定的第一频率接收所述环境信号,该第一频率对应于所述检测速率、例如30hz。根据功能方框413此外还设置,对所述环境信号进行处理以便探测机动车的周围环境中的对象。所述处理例如包括对环境信号的融合。该处理也以预确定的第一频率来执行。为了进行所述融合例如设置有融合单元。根据功能方框413此外还设置,求取对象列表,所述对象列表代表所探测到的对象。为了求取所述对象列表例如使用经融合的环境信号。
65.根据功能方框415设置,设备403求取是否发生了预确定的事件。
66.在预确定的事件未发生的情况下,根据功能方框417,向通信单元407输出心跳消息,该心跳消息包括最后所求取到的对象列表,从而根据功能方框421,该通信单元相应于预确定的发送频率、例如5hz来将该心跳消息发送给该机动车。
67.在预确定的事件发生的情况下,根据功能方框419设置,处理装置405向通信单元407输出当前的对象列表,根据功能方框421,该通信单元直接地并且与预确定的发送频率无关地将所述当前的对象列表作为紧急消息发送给机动车。
68.图5示出根据第一方面的第二系统501的方框图。系统501包括设备503,该设备设置为用于实施根据第一方面的方法的所有步骤。设备503包括处理装置505和通信单元507。第二系统501此外还包括环境传感器单元509,该环境传感器单元包括多个环境传感器(未示出),该环境传感器单元在空间上分布地布置在基础设施内,在该基础设施内机动车至少部分自动化地行驶。
69.根据功能方框511,环境传感器单元509中的若干环境传感器以预确定的第一检测速率、例如30hz检测机动车的周围环境并输出相应于该检测的第一环境信号,所述第一环境信号代表该机动车的该周围环境。
70.根据功能方框515,设备503以预确定的第一频率接收所述第一环境信号,该第一
频率相应于所述第一检测速率、即例如30hz。根据功能方框515此外还设置,对环境信号进行处理以便探测机动车的周围环境中的对象。所述处理例如包括对第一环境信号的融合。该处理也以预确定的第一频率来执行。例如,设置融合单元用于所述融合。根据功能方框515此外还设置,求取第一对象列表,该第一对象列表代表所探测到的对象。为了求取该第一对象列表例如使用经融合的环境信号。
71.根据功能方框513,环境传感器单元509的环境传感器中的其他的环境传感器以预确定的第二检测速率、例如20hz检测机动车的周围环境,并输出相应于该检测的第二环境信号,所述第二环境信号代表该机动车的该周围环境。
72.根据功能方框517,设备503以预确定的第二频率接收所述第二环境信号,该第二频率相应于所述第二检测速率、即例如20hz。根据功能方框517此外还设置,对所述第二环境信号进行处理以便探测机动车的周围环境中的对象。所述处理例如包括对所述第二环境信号的融合。该处理也以所述预确定的第二频率来执行。为了进行该融合例如设置有另外的融合单元或者相同的融合单元,该相同的融合单元也被用于融合所述环境传感器中的所述若干环境传感器的环境信号。根据功能方框517此外还设置,求取第二对象列表,该第二对象列表代表所探测到的对象。为了求取该第二对象列表例如使用经融合的环境信号。
73.根据功能方框519设置,设备503基于预确定的时间基准将所求取到的第一和第二对象列表按时间顺序排序,然后基于所述两个对象列表来求取是否发生了预确定的事件。
74.相应的事件例如通常与机动车的必要反应相联系。例如对具有缓慢的速度(机动车速度小于或小于等于预确定的机动车速度阈值)的在前行驶机动车的检测是不需要机动车快速且突然地做出反应的事件。例如,突然跑到高速公路上的儿童,需要机动车立即制动。因此例如将对象传输的顺序改变,并且例如以高优先级向机动车发送该突发事件(儿童跑到道路上)。其他对象的发送例如被中断并且例如获得更低的优先级。若“突发信息”(事件)已被发送,则继续进行用于对象列表的其他对象的序列。
75.在预确定的事件未发生的情况下,根据功能方框525,向通信单元507输出心跳消息,该心跳消息包括最后所求取到的对象列表,从而根据功能方框525,该通信单元相应于预确定的发送频率、例如5hz向机动车发送该心跳消息。
76.在预确定的事件发生的情况下,根据功能方框523设置,处理装置405向通信单元507输出当前的对象列表,根据功能方框525,该通信单元直接地并且与预确定的发送频率无关地将所述当前的对象列表作为紧急消息发送给机动车。
77.图6示出根据第五方面的系统601的方框图。系统601包括设备603和驾驶员辅助系统605,该设备设置为用于实施用于至少部分自动化地引导机动车的方法的所有步骤,该驾驶员辅助系统设置为用于提供至少部分自动化的驾驶功能。
78.设备603包括通信单元607,该通信单元设置为用于接收根据第一方面的系统的消息。通信单元607例如根据功能方框609接收消息。
79.设备603此外还包括处理装置611,根据功能方框613,该处理装置求取:所接收到的消息是以预确定的发送频率所发送的包括对象列表的心跳消息还是包括对象列表的紧急消息,其中,所述对象列表分别代表该机动车的一个周围环境。
80.在接收到紧急消息的情况下,根据功能方框617,借助设备603的输出端615向驾驶员辅助系统605输出“中断”和对象列表。根据功能方框619,驾驶员辅助系统605接收所述“中断”和对象列表。响应于接收到中断,根据功能方框619,驾驶员辅助系统605将目前对机动车的至少部分自动化的引导中断,并基于所接收到的对象列表至少部分自动化地引导该机动车,这例如包括执行紧急措施,例如紧急停车或者紧急避让机动动作。
81.如果根据功能方框613已求取到,所接收到的消息是包括对象列表的心跳消息,则根据功能方框621,借助输出端615向驾驶员辅助系统605输出所述对象列表,该驾驶员辅助系统根据功能方框619基于所述对象列表提供至少部分自动化的驾驶功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1