一种目视和仪表独立平行进近飞机之间冲突解脱方法及系统与流程
1.本发明涉及空域冲突检测与解脱技术领域,特别涉及一种目视和仪表独立平行进近飞机之间冲突解脱方法。
背景技术:
2.目视和仪表飞行规则同时存在的多跑道独立进近能够提高机场运行效率和机场容量,但是目前这种模式下飞机存在更多的机载防撞告警情况,且这些情况大多数都没有出现航迹交叉,管制员也无法提前在这种本身就不会冲突的情况下给出避让指令。这些产生的机载防撞告警有一部分为虚警,它与管制指令冲突,会使飞行员产生疑惑,可能造成飞行不正常事件,影响正常飞行秩序。
3.机载防撞告警原理如图5所示,基于对机载防撞告警原理的研究,触发机载防撞告警时的a飞机、b飞机一般有一定的冲突风险,考虑到目视进近本身会有更大的误差,目视和仪表独立平行进近的a飞机、b飞机在触发机载防撞告警时,比a飞机、b飞机实施仪表进近时具有更大的冲突风险。目视进近飞机计划航迹与真实航迹的偏差更大,进近过程中必须留有足够的安全裕度;而目视进近过程中飞行员的操作更自由,考虑飞行员操作误差,与a飞机、b飞机实施仪表进近相比,目视进近下同样等级的机载防撞告警可能代表了更高的冲突风险。
4.综上,在目视和仪表独立平行跑道运行模式中,需要减少机载防撞告警的产生,避免发生飞行冲突,确保飞行安全和机场运行效率。
技术实现要素:
5.本发明的目的在于克服现有技术中所存在的基于目视和仪表独立平行跑道运行模式,频发机载防撞告警的问题,提供一种目视和仪表独立平行进近飞机之间冲突解脱算法。
6.为了实现上述发明目的,本发明提供了以下技术方案:
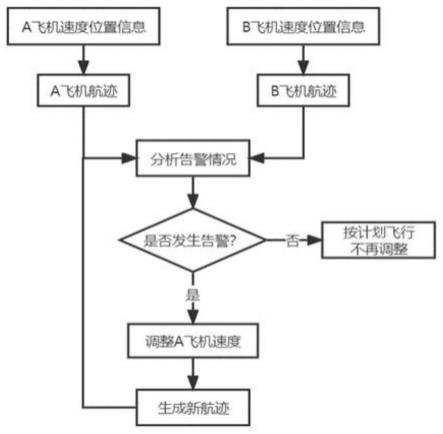
7.一种目视和仪表独立平行进近飞机之间冲突解脱方法,包括如下步骤:
8.步骤1、输入a飞机、b飞机在t1和t2时刻的速度和位置坐标信息,计算获取未来一段时间内两机的预测航迹;
9.步骤2、基于预测航迹,分析两机告警与冲突的情况;
10.步骤3、若存在告警与冲突的情况,则计算两机到达最接近点的所需时间t,判断t时刻两机预测位置坐标是否满足触发机载防撞系统(tcas)交通咨询告警(ta告警)的条件;
11.步骤4、针对触发交通咨询告警的航迹组,调整a飞机的飞行速度,重复步骤1至步骤3,直至找出恰好能不触发ta告警的最小调整速度。
12.进一步,步骤1包括:
13.步骤1-1、输入a飞机、b飞机在t1和t2时刻的速度和位置坐标信息;
14.步骤1-2、飞机下降高度过程中,垂直位移与水平位移有如下关系:
[0015][0016]
δs=vδt
[0017]
上式反映了垂直位移与水平位移关系,式中δh和δs分别为δt时间内飞机的垂直位移和水平位移,δl为飞行路程的变化量,为飞机速度方向与水平面在垂直方向上的夹角,v为飞机的速度;
[0018]
计算获取未来一段时间内两机的预测航迹。
[0019]
进一步,还包括步骤1-3、飞机在转弯过程中某时刻的水平位置坐标可由如下方程组得到:
[0020][0021]
δx=rsinε
[0022]
δy=rcosε
[0023]
ε=ωδt
[0024]
式中ω为角速度,r为飞机转弯半径,转弯过程中垂直位移变化规律与下高度过程类似,ε为速度方向与水平面在水平方向上的夹角,δx为飞行路程在x轴方向的变化量,δy为飞行路程在y轴方向的变化量;
[0025]
计算获取未来一段时间内两机的预测航迹。
[0026]
进一步,还包括步骤1-4、通过飞机前一时刻与后一时刻的速度和位置变化,计算得到飞机转弯半径信息:
[0027]
r=l/θ
[0028]
l=(t2-t1)v
[0029][0030]
式中,t1和t2为前后时刻,l为飞行的路程,x1和y1分别为t1时刻x、y轴方向的位置,x2和y2为t2时刻x、y轴方向的位置,θ为飞机转过的角度,r为转弯半径;
[0031]
基于获得的垂直位移、水平位移、水平位置坐标、转弯半径,计算获取未来一段时间内两机的预测航迹。
[0032]
进一步,步骤2包括:
[0033]
步骤2-1、计算并判断两机最接近点(cpa点)的距离是否满足冲突条件,判断a飞机、b飞机最接近点的距离是否满足如下条件:
[0034][0035]za-zb≥h
[0036]
其中,za和zb分别为a飞机、b飞机在最接近点时z轴方向的位置,xa、ya和xb、yb分别是a飞机、b飞机在最接近点各自的位置坐标信息;r为飞机的保护区中心到圆柱形边界的半径,h为保护区高度。
[0037]
步骤2-2、分析两机告警与冲突的情况,a飞机、b飞机最接近点的距离是否满足步骤2-1方程组的要求;
[0038]
若满足,则判断为a飞机和b飞机位置关系不会发生冲突;
[0039]
若不满足,则判断为a飞机和b飞机位置关系会发生冲突。
[0040]
进一步,步骤3包括:
[0041]
步骤3-1、若存在告警与冲突的情况;
[0042]
步骤3-2、则计算a飞机、b飞机到达最接近点的所需时间t;
[0043]
步骤3-3、判断t时刻两机预测位置坐标是否满足触发机载防撞系统交通咨询告警(ta告警)的条件;若满足,进一步计算触发机载防撞系统告警的时间。
[0044]
进一步,步骤4包括:
[0045]
步骤4-1、针对触发交通咨询告警的航迹组,按设置的步长调整仪表进近的a飞机的飞行速度;
[0046]
步骤4-2、根据调整后的速度生成新的a飞机航迹,重复步骤1-3判断新航迹是否会与目视进近的b飞机航迹触发交通咨询告警;
[0047]
步骤4-3、若触发交通咨询告警则进一步调整a飞机速度,通过多次调速和交通咨询告警判断的循环,找出恰好能不触发交通咨询告警的最小调整速度,通过多次循环调速和机载防撞系统告警判断,找出恰好能避免产生机载防撞系统告警的最小变速,直至a飞机、b飞机航迹不会产生冲突,也不再触发机载防撞系统告警,飞机可按该计划飞行,不再调整。
[0048]
本发明的另一目的是提供一种执行上述方法实现进近飞机之间冲突解脱方法的控制系统。
[0049]
一种目视和仪表独立平行进近飞机之间冲突解脱方法的控制系统,其特征在于,包括至少一个处理器,以及与所述至少一个处理器通信连接的存储器;所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述方法,所提出的算法及系统不仅合理控制了飞机之间的距离,避免冲突发生,提高飞行安全,还提高了跑道使用效率,进而提高了机场运行效率。
[0050]
与现有技术相比,本发明的有益效果:
[0051]
1.本发明提出了一种目视和仪表独立平行进近飞机之间的冲突解脱算法,实现了在机载防撞系统告警前的提前预测,研究了优化的避让逻辑来调整仪表进近飞机的飞行速度,达到减少机载防撞告警发生的目的,同时,基于该算法的机动飞行可以避免潜在的飞行冲突;
[0052]
2.本发明为目视和仪表独立平行运行模式中较大冲突风险、较高机载防撞告警概率等问题提出了解决方案,所提出的算法合理控制了飞机之间的距离,避免冲突发生,提高飞行安全,提高了跑道使用效率,进而提高了机场运行效率。
附图说明:
[0053]
图1为本发明所提出算法的流程图。
[0054]
图2为本发明所提出算法中调速模块的流程图。
[0055]
图3为两飞机航程示意图。
[0056]
图4为本发明所提出算法的调速比例输出的仿真结果图。
[0057]
图5为tcas告警原理。
具体实施方式
[0058]
下面结合试验例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
[0059]
实施例1
[0060]
针对国际上缺乏目视和仪表独立平行进近飞机之间的冲突的研究,本发明本发明提供了一种目视和仪表独立平行进近飞机之间的冲突解脱算法,输入a飞机、b飞机在t1和t2时刻的速度和位置坐标信息,获取a飞机、b飞机的预测航迹,计算a飞机、b飞机到达最接近点的所需时间t,分析a飞机、b飞机机载防撞系统告警与冲突的情况,并利用调速算法调整a飞机飞行速度形成新航迹完成避让,如图1所示,本发明提出的解脱冲突的方法步骤如下:
[0061]
step 1:输入a飞机、b飞机在t1和t2时刻的速度和位置坐标信息,根据以下公式与步骤计算获取未来一段时间内a飞机、b飞机的预测航迹。
[0062]
飞机下高度过程中,垂直位移与水平位移有如下关系:
[0063][0064]
δs=vδt
[0065]
式中δh和δs分别为δt时间内飞机的垂直位移和水平位移,δl为飞行路程的变化量,为飞机速度方向与水平面在垂直方向上的夹角,v为飞机的速度。
[0066]
飞机在转弯过程中某时刻的水平位置坐标可由如下方程组得到:
[0067][0068]
δx=rsinε
[0069]
δy=rcosε
[0070]
ε=ωδt
[0071]
式中ω为角速度,r为飞机转弯半径,ε为速度方向与水平面在水平方向上的夹角,δx为飞行路程在x轴方向的变化量,δy为飞行路程在y轴方向的变化量。
[0072]
转弯过程中垂直方向上的位移变化规律与下高度过程类似。
[0073]
通过飞机前一时刻与后一时刻的速度和位置变化可以得到飞机的转弯半径等信息,如图2所示,有方程组:
[0074]
r=l/θ
[0075]
l=(t2-t1)v
[0076][0077]
式中,t1和t2为前后时刻,l为飞行的路程,x1和y1分别为t1时刻x、y轴方向的位置,x2和y2为t2时刻x、y轴方向的位置,θ为飞机转过的角度,r为转弯半径;
[0078]
step 2:基于步骤1中计算的预测航迹,分析是否在a飞机、b飞机机载防撞系统中存在告警与冲突的情况,计算并判断a飞机、b飞机最接近点的距离是否满足冲突条件:飞机的保护区中心到圆柱形边界的半径为r,保护区高为h,则不发生冲突的两架飞机位置关系应满足如下方程组:
[0079][0080]z2-z1≥h
[0081]
其中,x1、y1、x2、y2分别为a飞机、b飞机在x、y轴方向的位置,z1和z2分别为a飞机、b飞机在z轴方向的位置;
[0082]
step 3:若最接近点(cpa点)的距离满足冲突条件,则计算a飞机、b飞机到达最接近点的所需时间t,判断t是否满足触发机载防撞系统告警的条件;若满足,进一步计算触发机载防撞系统告警的时间;
[0083]
step 4:如图3所示,针对触发机载防撞系统告警的航迹组研究了优化的避让逻辑,按设置的步长调整仪表进近的a飞机的飞行速度,根据调整后的速度生成新的a飞机航迹,重复step 1-3判断新航迹是否会与目视进近的b飞机航迹触发机载防撞系统告警;若触发机载防撞系统告警则进一步调整a飞机速度,通过多次调速和机载防撞系统告警判断的循环,找出恰好能不触发机载防撞系统告警的最小调整速度。此时a飞机、b飞机航迹不会产生冲突,也不再触发机载防撞系统告警。
[0084]
实施例2
[0085]
如图4所示,仿真结果表明,利用该算法构建避撞模型随机生成100万组航迹组合,其中以航迹的初始进近数据作为模型的输入变量,本实施例中4502组航迹会触发tcas(traffic collisionavoidance system,空中防撞系统)告警,该算法能够根据初始进近数据提前预测机载防撞系统告警,并且该算法进一步对触发告警的航迹组生成了调速建议:航迹组中的a飞机采纳算法给出的调速建议后,4502组航迹全部消除了tcas告警,模型输出的这些新航迹组合均不再有冲突和告警的发生。
[0086]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1