一种基于多属性融合神经网络的交通数据补偿方法
1.本发明属于智能交通领域,具体涉及一种基于多属性融合神经网络的交通数据补偿方法。
背景技术:
2.随着交通信息化的快速发展,交通数据爆炸式地增长,其中交通流量是描述交通流的一个重要指标,其变化规律反应了交通流基本性质。但直到目前,在各类检测环境下,我们始终没有办法规避数据缺失现象。缺失数据通常会产生非常广泛的影响,如果数据库中收集的是不完整的缺失数据,不仅会造成实际获取与预先估计数据量之间的差异,还会使最终计算的准确性降低。残缺交通数据恢复是针对海量交通数据的有效化处理,对交通管理系统(tms)和智能交通系统(its)的后续分析有着重要意义。因此,如何有效地对故障数据进行修复成了研究的热点。
3.目前,针对缺失数据的处理出现了各种各样的方法。这些数据补偿方法大致可分为三类:预测方法、插值方法和统计学习方法。交通流预测模型是复杂道路网络中道路交通管理的关键。预测方法通常利用历史数据建立预测模型,将缺失数据作为预测值。建立交通流预测模型的方法有很多种,从简单的删除部分缺失数据模型到复杂的基于时空的数据补偿模型。插值方法分为时间邻近法和模式邻近法。时间邻近法利用同一传感器在同一时间但相邻某几天的已知数据来填补缺失数据。模式邻近法利用每日交通流量数据的相似性特征,利用从同一传感器收集的不同日期的历史数据估计缺失数据。基于统计学习的方法是近年来发展起来的。该方法首先假设交通数据的概率分布模型,并使用迭代方法估计概率分布的参数。然后利用观测数据对缺失数据进行补偿。
4.交通数据补偿是典型的时空数据处理问题,不同类别的交通数据内嵌于连续空间,并且随时间动态变化,因此有效提取时空相关性对解决这类问题至关重要。guo等人(guo,shengnan,et al."attention based spatial-temporal graph convolutional networks for traffic flow forecasting."proceedings of the aaai conference on artificial intelligence.vol.33.no.01.2019.)提出了一种基于注意力的时空图卷积网络交通流预测,该模型通过注意力机制关注交通流在时空上的变化规律,提取交通流中的时空相关性对交通流进行预测,该论文说明利用时空图卷积网络捕获交通流的时空相关性,可以有效得对交通流进行预测。但是,面对城市道路存在许多复杂多样的空间结构,这使得难以通过路网拓扑来挖掘卡口间的空间依赖性,从而影响有效特征的表达;如何去挖掘交通数据中隐藏的时空相关性给交通数据处理带来了挑战;交通路网在不同路段的数据流变化趋势会随着时间而变化,如何真实地描述交通流在不同时间段的变化特征显然是个问题。
5.现有技术问题是:
6.1.城市道路空间复杂多样,城市道路存在许多复杂多样的空间结构,这使得难以通过路网拓扑来挖掘卡口间的空间依赖性,从而影响有效特征的表达;
7.2.交通数据的时空相关性影响数据补偿结果,交通数据具有多维特征且在时空维度上存在相关性,如何去挖掘交通数据中隐藏的时空相关性给交通数据处理带来了挑战;
8.3.交通数据存在动态性,交通路网在不同路段的数据流变化趋势会随着时间而变化,如何真实地描述交通流在不同时间段的变化特征显然是个问题。
技术实现要素:
9.为解决上述技术问题,本发明提出一种基于多属性融合神经网络的交通数据补偿方法,包括以下步骤:
10.s1:通过交通开放平台数据库中实时查询,得到路网卡口的交通流量数据;
11.s2:对路网卡口的交通流量数据进行数据清洗,删除重复数据、清理无效信息,得到结构化交通流量数据;
12.s3:根据路网卡口的结构化交通流量数据,利用trajectory2vectory算法计算卡口之间的量化关联程度,并采用目标函数最大化卡口之间的量化关联程度,根据最大化量化关联程度将路网中的相近卡口映射到矩阵空间中相近的位置,得到路网矩阵,并将对应卡口的交通流量数据填入路网矩阵中,卡口缺失的交通流量数据缺失用0填充,并对完成数据填充的矩阵进行优化,得到路网特征矩阵;
13.s4:建立路网交通流量数据恢复模型,所述路网交通流量数据恢复模型包括:时空同步图神经网络模块、时空图注意力机制模块、融合恢复网络模块;
14.s5:通过时空同步图神经网络模块捕获没有交通流量数据缺失的卡口的隐藏交通流状态,将卡口的隐藏交通流状态输入时空图注意力机制模块中,捕获没有流量数据缺失的卡口的动态特征;
15.s6:将卡口的隐藏交通流状态和卡口的动态特征输入融合恢复网络模块,恢复卡口缺失的交通流量数据;
16.s7:将恢复的卡口交通流量数据填入路网特征矩阵的对应卡口中,完成路网卡口的缺失流量数据的补偿。
17.优选的,利用trajectory2vectory算法计算卡口间的量化关联程度,其表达式包括:
[0018][0019]
其中,p(vj|vi)表示卡口节点vi与卡口节点vj之间的量化关联程度,表示将卡口节点vi为顶点时的向量表示,表示将卡口节点vi为特定相邻节点时的向量表示,|v|是矩阵的顶点数量,exp()表示指数函数,k表示顶点集合中的某一顶点,t表示向量的转置。
[0020]
优选的,采用目标函数最大化卡口之间的量化关联程度,其表达式包括:
[0021][0022]
其中,o表示目标函数,(i,j)∈e表示权重边集合中的一条权重边的两个顶点i和j,w
ij
表示边(i,j)的权重,p(vj|vi)表示卡口节点vi与卡口节点vj之间的量化关联程度。
[0023]
优选的,根据最大化量化关联程度将路网中的相近卡口映射到矩阵空间中相近的位置,得到路网矩阵,其表达式包括:
[0024][0025]
其中,p表示路网矩阵,argmax表示最大值自变量点集函数,表示将卡口节点vi为顶点时的向量表示,表示将卡口节点vi为特定相邻节点时的向量表示,|v|表示顶点矩阵的顶点数量,v表示顶点矩阵,exp()表示指数函数,k表示顶点集合中的某一顶点,t表示向量的转置,表示路网矩阵中卡口的向量集合。
[0026]
优选的,将对应卡口的交通流量数据填入路网矩阵中,卡口缺失的交通流量数据缺失用0填充,其表达式包括:
[0027][0028]
其中,p表示路网矩阵,表示矩阵中卡口节点(x,y)实际对应的卡口流量值,表示路网矩阵第x行y列的卡口节点,t表示时刻,表示实际路网中卡口的位置。
[0029]
优选的,所述路网特征矩阵,表示为:
[0030][0031]
其中,x
t
表示t时刻的路网特征矩阵,n2m()表示卡口节点转换为矩阵的表示函数,f
t
表示t时刻的路网流量值,表示一个r
×
c的矩阵,表示路网矩阵第x行y列的卡口节点,t表示时刻。
[0032]
优选的,卡口的隐藏交通流状态,表示为:
[0033]ht
=u
t
*h
t-1
+(1-u
t
)*c
t
[0034]
其中,h
t
表示卡口节点t时刻的隐藏交通流状态,h
t-1
表示上一时刻卡口节点的交通状态,u
t
表示gru模型的更新门控,u
t
=σ(wu·
[gc(x
t
,a),h
t-1
]+bu),σ表示激活函数,wu表示第一可学习参数,x
t
表示t时刻的路网特征矩阵,a表示邻接矩阵,bu表示第二可学习参数,c
t
表示推导出候选的交通隐藏状态,c
t
=tanh(wc·
[gc(x
t
,a),(r
t
,h
t-1
)]+bc),wc表示第三可学习参数,gc()表示卷积操作,bc表示第四可学习参数,r
t
表示gru模型的重置门控,r
t
=σ(wr·
[gc(x
t
,a),h
t-1
]+br),wr表示第五可学习参数,br表示第六可学习参数。
[0035]
优选的,卡口的动态特征,表示为:
[0036][0037]
其中,f
t
表示捕获的卡口节点的动态特征,t表示某一时刻,m表卡口数量,exp()表示指数函数,n表示隐藏状态数量,ek表示第k个隐藏状态的权重,hi表示各个时刻的交通隐
藏状态,α表示隐藏状态的权重,α=w2(w1hi+b1)+b2,w1表示第一层图神经网络的权重,w2表示第二层图神经网络的权重,b1表示第一层图神经网络的偏差,b2表示第二层图神经网络的偏差。
[0038]
优选的,恢复卡口缺失的交通流量数据,表示为:
[0039]gt
=recovery(merge(h
t
,f
t
))
[0040]
其中,g
t
表示t时刻时恢复后的路网流量,h
t
表示卡口节点t时刻的隐藏交通流状态,f
t
表示捕获的卡口节点动态特征,merge()表示将时空特征和动态特征进行特征融合的合并函数,recovery()表示根据融合的特征恢复卡口缺失的交通流量数据。
[0041]
本发明有益效果:本发明提出了一种基于多属性融合神经网络的交通数据补偿方法,通过trajectory2vectory算法从车辆轨迹中挖掘路口关系重构路网得到路网矩阵,并将对应卡口的流量填入其中构成路网特征矩阵,针对复杂交通路网的时空特性和交通流量动态缺失特点,提出了一种针对交通流量动态缺失的基于时空同步图神经网络的交通数据补偿方法,使用多模态结构结合路网的时空特性和交通流的动态特征对缺失数据进行恢复;不仅可以更准确得恢复缺失的交通数据,还可以分析出交通路网上的交通变化状态。
附图说明
[0042]
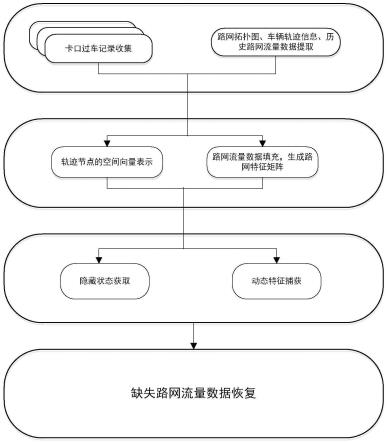
图1为本发明的总体流程图;
[0043]
图2为本发明的总体模型框架图;
[0044]
图3为本发明的构建路网模型流程图;
[0045]
图4为本发明的时空特征提取示意图;
[0046]
图5为本发明的路网流量恢复模型流程图。
具体实施方式
[0047]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0048]
一种基于多属性融合神经网络的交通数据补偿方法,如图1所示,包括以下步骤:
[0049]
s1:通过交通开放平台数据库中实时查询,得到路网卡口的交通流量数据;
[0050]
s2:对路网卡口的交通流量数据进行数据清洗,删除重复数据、清理无效信息,得到结构化交通流量数据;
[0051]
s3:根据路网卡口的结构化交通流量数据,利用trajectory2vectory算法计算卡口之间的量化关联程度,并采用目标函数最大化卡口之间的量化关联程度,根据最大化量化关联程度将路网中的相近卡口映射到矩阵空间中相近的位置,得到路网矩阵,并将对应卡口的交通流量数据填入路网矩阵中,卡口缺失的交通流量数据缺失用0填充,并对完成数据填充的矩阵进行优化,得到路网特征矩阵;
[0052]
s4:建立路网交通流量数据恢复模型,所述路网交通流量数据恢复模型包括:时空同步图神经网络模块、时空图注意力机制模块、融合恢复网络模块;
[0053]
s5:通过时空同步图神经网络模块捕获没有交通流量数据缺失的卡口的时空特
征,通过时空图注意力机制模块捕获没有流量数据缺失的卡口的动态特征;
[0054]
s6:将捕获的时空特征和动态特征输入融合恢复网络模块,恢复卡口缺失的交通流量数据;
[0055]
s7:将恢复的卡口交通流量数据填入路网特征矩阵的对应卡口中,完成路网卡口的缺失流量数据的补偿。
[0056]
获取数据源,数据源的获取可以直接从交通开放平台提供的数据库中实时查询,其中包括车牌号、过车时间和卡口编号等属性,从中提取当前区域中的路网拓扑图、车辆轨迹信息、历史路网流量数据,将交通路网各个节点的交通流数据收集。
[0057]
简单的数据清洗以及整理:通常获取的原始数据都是非结构化的,不能直接用于数据分析,通过简单的数据清洗可以使大部分非结构化数据结构化,例如:删除重复数据、清理无效信息等。
[0058]
如图3所示,利用trajectory2vectory算法通过轨迹挖掘将路网中的相近卡口的量化关联程度,映射到矩阵空间中相近的位置,重构路网成矩阵形式,并将对应卡口的流量填入其中构成路网特征矩阵。
[0059]
利用trajectory2vectory算法计算卡口间的量化关联程度,其表达式包括:
[0060][0061]
其中,p(vj|vi)表示卡口节点vi与卡口节点vj之间的量化关联程度,表示将卡口节点vi为顶点时的向量表示,表示将卡口节点vi为特定相邻节点时的向量表示,|v|是矩阵的顶点数量,exp()表示指数函数,k表示顶点集合中的某一顶点,t表示向量的转置。
[0062]
由于路网中各个卡口的重要性不同,因此,在目标函数中引入λi来表示网络中卡口i的权重,可以通过度数degree来衡量卡口的重要性;经验分布定义为其中w
ij
是边(i,j)的权重,di是顶点i的出度,即di=∑
k∈n(i)wik
,其中n(i)是顶点vi的近邻集;在本专利中为了简单起见,将λi设置为顶点i的度,即λi=di,我们还采用kl-散度作为距离函数,用kl-散度替换d(.,.),设置λi=di并省略一些常数,采用目标函数最大化卡口之间的量化关联程度,其表达式包括:
[0063][0064]
其中,o表示目标函数,(i,j)∈e表示权重边集合中的一条权重边的两个顶点i和j,w
ij
表示边(i,j)的权重,p(vj|vi)表示卡口节点vi与卡口节点vj之间的量化关联程度。
[0065]
通过统计学概率模型来度量轨迹中卡口之间的关联性,并通过将卡口集嵌入到另一个空间来最大化卡口间的关联性,最终实现使用简单的数学向量表征交通路网中卡口间复杂的时空关联性;通过构造一个s维向量空间使得每一个顶点vi都可以在空间有唯一的映射向量根据最大化量化关联程度将路网中的相近卡口映射到矩阵空间中相近的位置,得到路网特征矩阵,其表达式包括:
[0066][0067]
其中,p表示路网矩阵,argmax表示最大值自变量点集函数,表示将卡口节点vi为顶点时的向量表示,表示将卡口节点vi为特定相邻节点时的向量表示,|v|表示顶点矩阵的顶点数量,v表示顶点矩阵,exp()表示指数函数,k表示顶点集合中的某一顶点,t表示向量的转置,表示路网矩阵中卡口的向量集合,u表示路网矩阵中的卡口数量集合。
[0068]
将对应卡口的交通流量数据填入路网特征矩阵中,卡口缺失的交通流量数据缺失用0填充,其表达式包括:
[0069][0070]
其中,p表示路网矩阵,表示矩阵中卡口节点(x,y)实际对应的卡口流量值,表示路网矩阵第x行y列的卡口节点,t表示时刻,表示实际路网中卡口的位置。
[0071]
所述路网特征矩阵,表示为:
[0072][0073]
其中,x
t
表示t时刻的路网特征矩阵,n2m()表示卡口节点转换为矩阵的表示函数,f
t
表示t时刻的路网流量值,表示一个r
×
c的矩阵,表示路网矩阵第x行y列的卡口节点,t表示时刻。
[0074]
建立路网交通流量数据恢复模型,如图2所示,所述路网交通流量数据恢复模型包括:时空同步图神经网络模块、时空图注意力机制模块、融合恢复网络模块;利用时空同步图神经网络挖掘卡口交通流的时空相关性,多维完成数据补偿,引入时空图的注意力机制来模拟交通数据的动态特性,提高数据补偿的准确性,通过融合恢复网络模块,最后进行数据恢复,即对缺失的交通流进行数据补偿。
[0075]
在对路网进行建模后,轨迹序列被表示成为矩阵。在现实生活中,路网中的交通状态随着时间不断变化,为了捕获交通数据中的时空特征,通过gcn获取路网的拓扑特征,获得空间相关性,通过gru捕捉不同路段上交通状态的动态变化,获得交通状态的局部时间趋势。通过将图卷积网络(gcn)和门控循环单元(gru)组合起来提取交通流的时空特征,以方便对缺失节点数据进行计算。
[0076]
gcn模型主要目的是提取交通数据的空间相关性,即获得邻近卡口之间的关联程度,以及考虑各个连通路段的影响关系,gcn的建模过程可以表示为:
[0077][0078]
其中σ是激活函数,表示具有自环的邻接矩阵,表示相应的度矩阵,w
l
是第l卷积层的权值矩阵,y
l
是输出表示;y0=x
t
表示对在t时刻的路网特征矩阵,我们将多个时间步长的路网特征矩阵x以及邻接矩阵a作为输入,gcn模型生成序列化的空间图的时间切片,捕捉不同时间步长的路网上的空间依赖性。
[0079]
将这些时间切片输入到gru模型,对时间依赖性进行建模并推导出隐藏的交通状
态。gru模型主要由重置门控r和更新门控u组成,在t时刻,利用重置门控r
t
将之前的交通状态h
t-1
与时刻t的空间图相结合。推导出候选的隐藏状态c
t
。u
t
为更新门控,用于确定h
t-1
之前的交通流状态需要丢弃多少,以及c
t
需要获取哪些新的信息,从而得出最终的隐藏交通流状态,即时空特征h。
[0080]
通过时空同步图神经网络模块捕获没有交通流量数据缺失的卡口的隐藏交通流状态:
[0081]ht
=u
t
*h
t-1
+(1-u
t
)*c
t
[0082]
其中,h
t
表示卡口节点t时刻的隐藏交通流状态,h
t-1
表示上一时刻卡口节点的交通状态,u
t
表示gru模型的更新门控,u
t
=σ(wu·
[gc(x
t
,a),h
t-1
]+bu),σ表示激活函数,wu表示第一可学习参数,x
t
表示t时刻的路网特征矩阵,a表示邻接矩阵,bu表示第二可学习参数,c
t
表示推导出候选的交通隐藏状态,c
t
=tanh(wc·
[gc(x
t
,a),(r
t
,h
t-1
)]+bc),wc表示第三可学习参数,gc()表示卷积操作,bc表示第四可学习参数,r
t
表示gru模型的重置门控,r
t
=σ(wr·
[gc(x
t
,a),h
t-1
]+br),wr表示第五可学习参数,br表示第六可学习参数。
[0083]
在交通路网中不同时段,不同的路段对当前路网中的交通流量影响不同。我们利用时空图的注意力机制关注每个路段在不同时刻的影响力,即捕获动态特征,计算出能够表达交通状态全局变化趋势的动态特征向量,用于对缺失数据的计算。首先,利用上一步时空同步图神经网络计算不同时刻的隐藏状态hi(i=1,2,3,...,n)。其次,设计一个评分函数计算每个隐藏状态的权重。然后,设计一个注意函数来计算能够描述全局交通变化信息的动态特征向量
[0084]
计算每个隐藏状态的权重:
[0085]ei
=w2(w1h+b1)+b2[0086][0087]
其中,h={h1,h2,...,hn},以各个时刻的隐藏状态hi作为输入,通过两层隐藏层可以得到相应的输出;w1和b1是第一层的权重和偏差,w2和b2是第二层的权重和偏差。每个特征αi的权重由softmax归一化指数函数计算。
[0088]
卡口的动态特征,表示为:
[0089][0090]
其中,f
t
表示捕获的卡口节点的动态特征,t表示某一时刻,m表卡口数量,exp()表示指数函数,n表示隐藏状态数量,ek表示第k个隐藏状态的权重,hi表示各个时刻的交通隐藏状态,α表示隐藏状态的权重,α=w2(w1hi+b1)+b2,w1表示第一层图神经网络的权重,w2表示二层图神经网络的权重,b1表示一层图神经网络的偏差,b2表示第二层图神经网络的偏差。
[0091]
将卡口的隐藏交通流状态和卡口的动态特征输入融合恢复网络模块,恢复卡口缺失的交通流量数据,表示为:
[0092]gt
=recovery(merge(h
t
,f
t
))
[0093]
其中,g
t
表示t时刻时恢复后的路网流量,h
t
表示卡口节点t时刻的隐藏交通流状态,f
t
表示捕获的卡口节点动态特征,merge()表示将时空特征和动态特征进行特征融合的合并函数,recovery()表示根据融合的特征恢复卡口缺失的交通流量数据。
[0094]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1