基于雷视融合的交叉路口导流线分析方法以及系统与流程
1.本技术涉及智慧交通技术领域,特别是涉及一种基于雷视融合的交叉路口导流线分析方法以及系统。
背景技术:
2.交叉路口的交通状况优化是预防和缓解交通拥堵的关键,而交叉路口中 导流线的合理绘制是管控交叉路口的车辆的关键点。导流线的形式主要为一 个或几个根据路口地形设置的白色v形线或斜纹线区域,表示车辆必须按规 定的路线行驶,不得压线或越线行驶,主要用于过宽、不规则或行驶条件比 较复杂的交叉路口。
3.然而,传统方法采用泼水看车辙的方法对交叉路口的导流线进行分析,判断导流线是否绘制合理,从而判断是否影响车辆通行。传统方法只能一次针对某一部分路段进行判断分析导流线是否绘制合理,导致耗费人力且效率偏低。
技术实现要素:
4.本技术的目的是解决传统方法耗费人力且效率偏低的技术问题。为实现上述目的,本技术提供一种基于雷视融合的交叉路口导流线分析方法以及系统。
5.本技术提供一种基于雷视融合的交叉路口导流线分析方法,包括:获取视频图像数据与雷达探测数据;将所述视频图像数据与所述雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信息;获取所述交叉路口的地图信息,根据所述地图信息与所述相对时空信息获得所述交叉路口的所有车辆的绝对时空信息;根据每个车辆的所述绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据所述实际车辙宽度与所述绝对时空信息中车辆经纬度,获得所述实际车辙宽度的经纬度,并将所述实际车辙宽度的经纬度投影至所述地图信息中,获得每个车辆的模拟车辙宽度;以每个车辆在每个时刻的所述车辆经纬度为中心点,向垂直于车辆方向角方向进行所述模拟车辙宽度的线段延伸,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的所述车辙进行逐个端点连接,形成每个车辆的车轮轨迹;对所述交叉路口的每个车辆的所述车轮轨迹进行热力图效果处理,获得所述交叉路口的车轮轨迹热力图;根据每个车辆在每个时刻的所述车辆经纬度,将所述交叉路口的所述车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的导流线绘制是否正确。
6.在一个实施例中,所述以每个车辆在每个时刻的所述绝对时空信息中车辆经纬度为中心点,向垂直于车辆方向角方向进行所述车辙宽度的线段延伸,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的所述车辙进行逐个端点连接,形成每个车辆的车
轮轨迹之后,所述对所述交叉路口的每个车辆的所述车轮轨迹进行热力图效果处理,获得所述交叉路口的车轮轨迹热力图之前,所述方法还包括:根据所述地图信息中进出口方向以及车道信息,对每个车辆的所述车轮轨迹进行分类,形成进口方向车轮轨迹集、出口方向车轮轨迹集以及车道车轮轨迹集。
7.在一个实施例中,所述对所述交叉路口的每个车辆的所述车轮轨迹进行热力图效果处理,获得所述交叉路口的车轮轨迹热力图,包括:将所述交叉路口对应的所述进口方向车轮轨迹集中每个所述车轮轨迹进行热力图效果处理,获得进口车轮轨迹热力图;或者将所述交叉路口对应的所述出口方向车轮轨迹集中每个所述车轮轨迹进行热力图效果处理,获得出口车轮轨迹热力图;或者将所述交叉路口对应的所述车道车轮轨迹集中每个所述车轮轨迹进行热力图效果处理,获得车道车轮轨迹热力图。
8.在一个实施例中,所述根据每个车辆在每个时刻的所述车辆经纬度,将所述交叉路口的所述车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的导流线绘制是否正确,包括:根据每个车辆在每个时刻的所述车辆经纬度,将所述进口车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的进口方向的导流线绘制是否正确;或者根据每个车辆在每个时刻的所述车辆经纬度,将所述出口车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的出口方向的导流线绘制是否正确;或者根据每个车辆在每个时刻的所述车辆经纬度,将所述车道车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的车道的导流线绘制是否正确。
9.在一个实施例中,本技术提供一种基于雷视融合的交叉路口导流线分析方法,包括:获取视频图像数据与雷达探测数据;将所述视频图像数据与所述雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信息;获取所述交叉路口的地图信息,根据所述地图信息与所述相对时空信息获得所述交叉路口的所有车辆的绝对时空信息;根据每个车辆的所述绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据所述实际车辙宽度与所述绝对时空信息中车辆经纬度,获得所述实际车辙宽度的经纬度,并将所述实际车辙宽度的经纬度投影至所述地图信息中,获得每个车辆的模拟车辙宽度;将每个车辆在每个时刻的所述绝对时空信息中车辆经纬度为中心点进行连接,获得每个车辆的车辆中心点轨迹;以所述车辆中心点轨迹中每个中心点为顶点且相邻所述中心点的轨迹为边,向内角与外角构建长度为所述车辙宽度的角平分线,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的所述车辙进行逐个端点连接,形成每个车辆的车轮轨迹;对所述交叉路口的每个车辆的所述车轮轨迹进行热力图效果处理,获得所述交叉路口的车轮轨迹热力图;
根据每个车辆在每个时刻的所述车辆经纬度,将所述交叉路口的所述车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的导流线绘制是否正确。
10.在一个实施例中,本技术提供一种基于雷视融合的交叉路口导流线分析系统,包括:数据获取模块,用于获取视频图像数据与雷达探测数据;相对时空信息获取模块,用于将所述视频图像数据与所述雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信息;绝对时空信息获取模块,用于获取所述交叉路口的地图信息,根据所述地图信息与所述相对时空信息获得所述交叉路口的所有车辆的绝对时空信息;车辙宽度获取模块,用于根据每个车辆的所述绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据所述实际车辙宽度与所述绝对时空信息中车辆经纬度,获得所述实际车辙宽度的经纬度,并将所述实际车辙宽度的经纬度投影至所述地图信息中,获得每个车辆的模拟车辙宽度;第一车轮轨迹获取模块,用于以每个车辆在每个时刻的所述车辆经纬度为中心点,向垂直于车辆方向角方向进行所述模拟车辙宽度的线段延伸,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的所述车辙进行逐个端点连接,形成每个车辆的车轮轨迹;车轮轨迹热力图获取模块,用于对所述交叉路口的每个车辆的所述车轮轨迹进行热力图效果处理,获得所述交叉路口的车轮轨迹热力图;分析模块,用于根据每个车辆在每个时刻的所述车辆经纬度,将所述交叉路口的所述车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的导流线绘制是否正确。
11.在一个实施例中,所述基于雷视融合的交叉路口导流线分析系统还包括:车轮轨迹集获取模块,用于根据所述地图信息中进出口方向以及车道信息,对每个车辆的所述车轮轨迹进行分类,形成进口方向车轮轨迹集、出口方向车轮轨迹集以及车道车轮轨迹集。
12.在一个实施例中,所述车轮轨迹热力图获取模块包括:进口车轮轨迹热力图获取模块,用于将所述交叉路口对应的所述进口方向车轮轨迹集中每个所述车轮轨迹进行热力图效果处理,获得进口车轮轨迹热力图;或者出口车轮轨迹热力图获取模块,用于将所述交叉路口对应的所述出口方向车轮轨迹集中每个所述车轮轨迹进行热力图效果处理,获得出口车轮轨迹热力图;或者车道车轮轨迹热力图获取模块,用于将所述交叉路口对应的所述车道车轮轨迹集中每个所述车轮轨迹进行热力图效果处理,获得车道车轮轨迹热力图。
13.在一个实施例中,所述分析模块包括:第一分析判断模块,用于根据每个车辆在每个时刻的所述车辆经纬度,将所述进口车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的进口方向的导流线绘制是否正确;或者第二分析判断模块,用于根据每个车辆在每个时刻的所述车辆经纬度,将所述出口车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的出口方向的导流
线绘制是否正确;或者第三分析判断模块,用于根据每个车辆在每个时刻的所述车辆经纬度,将所述车道车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的车道的导流线绘制是否正确。
14.在一个实施例中,本技术提供一种基于雷视融合的交叉路口导流线分析系统,包括:数据获取模块,用于获取视频图像数据与雷达探测数据;相对时空信息获取模块,用于将所述视频图像数据与所述雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信息;绝对时空信息获取模块,用于获取所述交叉路口的地图信息,根据所述地图信息与所述相对时空信息获得所述交叉路口的所有车辆的绝对时空信息;车辙宽度获取模块,用于根据每个车辆的所述绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据所述实际车辙宽度与所述绝对时空信息中车辆经纬度,获得所述实际车辙宽度的经纬度,并将所述实际车辙宽度的经纬度投影至所述地图信息中,获得每个车辆的模拟车辙宽度;车辆中心点轨迹获取模块,用于将每个车辆在每个时刻的所述绝对时空信息中车辆经纬度为中心点进行连接,获得每个车辆的车辆中心点轨迹;第二车轮轨迹获取模块,用于以所述车辆中心点轨迹中每个中心点为顶点且相邻所述中心点的轨迹为边,向内角与外角构建长度为所述车辙宽度的角平分线,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的所述车辙进行逐个端点连接,形成每个车辆的车轮轨迹;车轮轨迹热力图获取模块,用于对所述交叉路口的每个车辆的所述车轮轨迹进行热力图效果处理,获得所述交叉路口的车轮轨迹热力图;分析模块,用于根据每个车辆在每个时刻的所述车辆经纬度,将所述交叉路口的所述车轮轨迹热力图转移至所述地图信息中进行分析,判断所述交叉路口的导流线绘制是否正确。
15.上述基于雷视融合的交叉路口导流线分析方法以及系统中,基于视频图像数据与雷达探测数据对交叉路口进行实时测量,获得交叉路口处各个车辆的绝对时空信息。根据各个车辆的绝对时空信息,获得每个车辆的实际车辙宽度,并根据经纬度信息对路面上的实际车辙宽度投影至高精度地图中,模拟出每个车辆的模拟车辙宽度。根据每个车辆的模拟车辙宽度,以每个车辆在每个时刻的车辆经纬度为中心点并向垂直于车辆方向角方向进行模拟车辙宽度的线段延伸,形成每个车辆在每个时刻的车辙。对每个车辆在每个时刻的车辙进行连接,形成了每个车辆的车轮轨迹,并基于每个车辆的车轮轨迹形成车轮轨迹热力图。从而,将车轮轨迹热力图转移至高精度地图中,可以实现对交叉路口的导流线的绘制合理性进行判断,判断是够绘制准确,完成了对交叉路口导流线施画合理性的分析,可以准确真实的反应车辆与道路导流线的关系。
16.因此,通过本技术提供的基于雷视融合的交叉路口导流线分析方法,可以大面积对交叉路口的导流线的合理性进行分析处理,可以准确且广泛地给出交叉路口的导流线画线及轨迹分布,减少了人为试验统计,节省了人力且提高了分析效率,解决了传统采用泼水
看车辙方法导致的耗费人力且效率偏低的问题。
附图说明
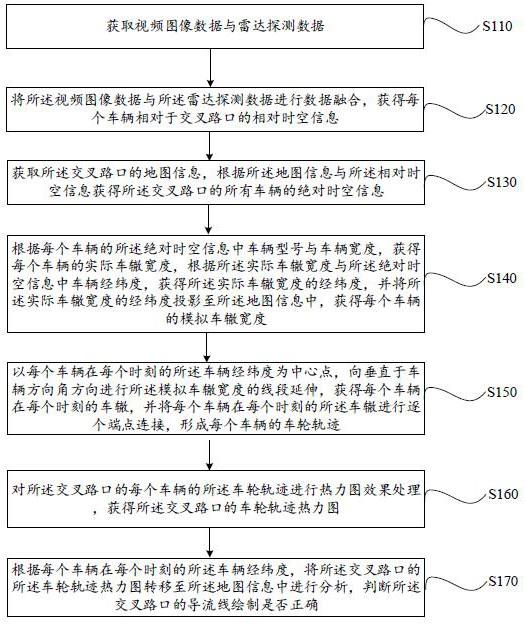
17.图1是本技术提供的一个实施例中基于雷视融合的交叉路口导流线分析方法的步骤流程示意图。
18.图2是本技术提供的图1所示实施例中车轮轨迹的形成示意图。
19.图3是本技术提供的另一个实施例中基于雷视融合的交叉路口导流线分析方法的步骤流程示意图。
20.图4是本技术提供的图3所示实施例中车辆中心点轨迹的形成示意图。
21.图5是本技术提供的图3所示实施例中车轮轨迹的形成示意图。
[0022][0023]
具体实施方式
[0024]
下面通过附图和实施例,对本技术的技术方案做进一步的详细描述。
[0025]
请参见图1,本技术提供一种基于雷视融合的交叉路口导流线分析方法,包括:s110,获取视频图像数据与雷达探测数据;s120,将视频图像数据与雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信息;s130,获取交叉路口的地图信息,根据地图信息与相对时空信息获得交叉路口的所有车辆的绝对时空信息;s140,根据每个车辆的绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据实际车辙宽度与绝对时空信息中车辆经纬度,获得实际车辙宽度的经纬度,并将实际车辙宽度的经纬度投影至地图信息中,获得每个车辆的模拟车辙宽度;s150,以每个车辆在每个时刻的车辆经纬度为中心点,向垂直于车辆方向角方向进行模拟车辙宽度的线段延伸,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的车辙进行逐个端点连接,形成每个车辆的车轮轨迹;s160,对交叉路口的每个车辆的车轮轨迹进行热力图效果处理,获得交叉路口的车轮轨迹热力图;s170,根据每个车辆在每个时刻的车辆经纬度,将交叉路口的车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的导流线绘制是否正确。
[0026]
本实施例中,在s110中,视频图像数据与雷达探测数据可以通过雷视一体机获得。雷视一体机设置于交叉路口位置。在s120与s130中,通过视频处理软件对视频图像进行逐帧图像提取,并基于深度学习方法对逐帧图像进行检测识别,获得车头间距、车头时距、车辆车牌号码、车辆颜色、车辆车牌颜色、车辆宽度、车辆型号以及方向角等基于相机捕获的车辆信息。雷达探测可以在恶劣探测环境与恶劣环境下获取车辆距离、车辆方位、车辆速度、车辆加速度以及车辆空间位置等基于雷达的车辆信息。
[0027]
根据雷达探测数据可以获得车辆相对于交叉路口的相对距离。根据视频图像数据能够获得车辆的自身属性信息(例如车牌号、车牌颜色以及车辆颜色等信息)、每帧图像时
间信息。将视频图像数据与雷达探测数据进行数据融合后,能够获得每个车辆相对于交叉路口的相对时空信息。相对时空信息是以交叉路口为参考的时空信息。时空信息可以理解为车辆在不同时刻的空间位置,具体包括了时间信息、车辆位置信息、车辆速度信息、车辆行驶方向信息、车辆型号信息等多维度信息。每个车辆相对于交叉路口的相对时空信息,包括了每个车辆在不同时间下相对于交叉路口的空间位置。
[0028]
高精度地图由实际测绘获得,提供物理世界环境的真实孪生信息,包括参考线、车道线、中心线、路牙、波形护栏、水泥护栏、过街天桥、交通标牌、轮廓标、桥墩、箭头、文字、符号、警示区、导流区、交通灯、停止位置、人行横道、公共交通停靠、减速、路口内自行车道、禁停区、井盖、停车位、交通灯光灯杆、计时牌、信号机、导流岛、立交涵洞、检查站、路口中心圈、隧道墙、公交港湾线、中央隔离带、路口面、收费站要素等信息。地图信息包括但不限于车道区域、标线位置、渠化信息、地面标志等信息。
[0029]
根据相对位置之间转换关系,可以将相对时空信息映射到绝对时空信息。绝对时空信息不依赖于交叉路口的位置,且不依赖于雷视一体机的位置,为单独存在的具有时间信息和空间信息的数据。例如:在一个实施例中,高精度地图可以提供交叉路口的停止线轮廓位置信息、车道线轮廓位置信息以及交叉路口的经纬度信息等。相对时空信息包括车辆相对于交叉路口的相对空间位置,根据车辆相对于交叉路口距离可以将相对空间位置转换成地理坐标系下的绝对空间位置,获得车辆对应的经纬度信息。进而,根据车辆各个时刻对应的经纬度信息,可以在地图上进行车辆标记,与测绘形成的高精度地图进行高精度结合,提供相关地理位置信息支持。通过将视频图像数据与雷达探测数据进行数据融合,获得每个车辆的相对时空信息,可以进一步获得经过交叉路口的所有车辆的相对时空信息,并结合车辆相对于交叉路口的距离,获得经过交叉路口的所有车辆的绝对时空信息。
[0030]
在s140中,车辆型号表征了车辆的品牌种类以及车型,通过识别车辆型号与车辆宽度可以计算获得车辙宽度。车辙为车辆在路面上行驶后留下的车轮压痕,能够为路面的维修、养护及翻修提供参考依据。实际车辙宽度可以理解为两侧车轮(左侧车轮和右侧车轮)在实际路面上留下的车轮压痕之间的距离。本步骤中实际车辙宽度为车辆在道路上行驶时的实际留下的车轮压痕的宽度。车辆位置通过车辆经纬度来表示。车辆经纬度表示了车辆的中心点的位置。根据表征车辆中心点的车辆经纬度与实际车辙宽度,可以计算出实际车辙宽度对应的经纬度,将经纬度投影至高精度地图中,可以获得实际车辙宽度投影到高精度地图中形成的模拟车辙宽度。模拟车辙宽度为每个车辆的实际车辙宽度投影至高精度地图中形成的宽度。
[0031]
请参见图2,图2中黑色实心点为每个车辆的车辆经纬度,箭头为车辆方向角方向,虚线段长度为模拟车辙宽度,两条实曲线为每个车辆的车轮轨迹。两条实曲线可以理解为左侧车轮的轨迹与右侧车轮的轨迹,进而形成了车辆的车轮行驶轨迹。在s150中,以车辆经纬度为中心点向垂直于方向角的方向进行车辙宽度的线段延伸,可以获得以车辆经纬度(也可以理解为车辆中心点)为中心点的每个时刻的车辙。将多个时刻的车辙进行逐个连接,形成了每个车辆的车轮轨迹。
[0032]
在s160中,热力图效果处理可以理解为以不同亮度的形式进行显示,可以体现出颜色深浅位置,代表了各个车辆行驶的轨迹的重合度。本步骤中,对每个车辆的车轮轨迹以半透明且带有宽度的曲线进行叠加展示,当车轮轨迹不断叠加,颜色深代表车轮轨迹出现
频率高,颜色浅代表车轮轨迹出现频率低,代表了各个车辆的行驶位置重合度,形成了车轮轨迹热力图。
[0033]
在s170中,车轮轨迹热力图通过多个车辆的车轮轨迹形成,车轮轨迹以车辆经纬度为中心点参考形成。根据车辆经纬度,可以将车轮轨迹热力图转移至高精度地图中进行分析。在交叉路口的各个车辆需要遵循导流线方向进行行驶。以高精度地图为参考,将车轮轨迹热力图体现在地图中对应交叉路口位置处,结合地图中交叉路口的各个方向、进出口以及车道的导流线信息,可以准确地判断出车轮轨迹热力图中各个车辆的车轮轨迹与地图中导流线的位置关系,判断是否存在车轮轨迹热力图与地图中导流线的边界是否有交叉冲突,是否有压线等不合理情况,从而可以判断交叉路口的导流线绘制是否正确。如果交叉路口的导流线绘制不正确,则可以参考车轮轨迹热力图重新进行绘制或者对原来的导流线进行修正,以使得交叉路口的导流线可以适用于大多数的车辆行驶路线。如果交叉路口的导流线绘制正确,则对交叉路口的导流线进行保留。
[0034]
本技术提供的基于雷视融合的交叉路口导流线分析方法,基于视频图像数据与雷达探测数据对交叉路口进行实时测量,获得交叉路口处各个车辆的绝对时空信息。根据各个车辆的绝对时空信息,获得每个车辆的实际车辙宽度,并根据经纬度信息对路面上的实际车辙宽度投影至高精度地图中,模拟出每个车辆的模拟车辙宽度。根据每个车辆的模拟车辙宽度,以每个车辆在每个时刻的车辆经纬度为中心点并向垂直于车辆方向角方向进行模拟车辙宽度的线段延伸,形成每个车辆在每个时刻的车辙。对每个车辆在每个时刻的车辙进行连接,形成了每个车辆的车轮轨迹,并基于每个车辆的车轮轨迹形成车轮轨迹热力图。从而,将车轮轨迹热力图转移至高精度地图中,可以实现对交叉路口的导流线的绘制合理性进行判断,判断是够绘制准确,完成了对交叉路口导流线施画合理性的分析,可以准确真实的反应车辆与道路导流线的关系。因此,通过本技术提供的基于雷视融合的交叉路口导流线分析方法,可以大面积对交叉路口的导流线的合理性进行分析处理,可以准确且广泛地给出交叉路口的导流线画线及轨迹分布,减少了人为试验统计,节省了人力且提高了分析效率,解决了传统采用泼水看车辙方法导致的耗费人力且效率偏低的问题。
[0035]
请参见图3,在一个实施例中,本技术提供一种基于雷视融合的交叉路口导流线分析方法,包括:s210,获取视频图像数据与雷达探测数据;s220,将视频图像数据与雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信息;s230,获取交叉路口的地图信息,根据地图信息与相对时空信息获得交叉路口的所有车辆的绝对时空信息;s240,根据每个车辆的绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据实际车辙宽度与绝对时空信息中车辆经纬度,获得实际车辙宽度的经纬度,并将实际车辙宽度的经纬度投影至地图信息中,获得每个车辆的模拟车辙宽度;s250,将每个车辆在每个时刻的车辆经纬度为中心点进行连接,获得每个车辆的车辆中心点轨迹;s260,以车辆中心点轨迹中每个中心点为顶点且相邻中心点的轨迹为边,向内角与外角构建长度为车辙宽度的角平分线,获得每个车辆在每个时刻的车辙,并将每个车辆
在每个时刻的车辙进行逐个端点连接,形成每个车辆的车轮轨迹;s270,对交叉路口的每个车辆的车轮轨迹进行热力图效果处理,获得交叉路口的车轮轨迹热力图;s280,根据每个车辆在每个时刻的车辆经纬度,将交叉路口的车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的导流线绘制是否正确。
[0036]
本实施例中,s210至s240的各个步骤的相关描述可参考上述实施例中s110至s140的各个步骤的相关描述。请参见图4与图5,在s250中,将每个车辆在每个时刻的车辆经纬度作为中心点,将多个中心点逐个连接起来,形成车辆中心点轨迹。车辆经纬度表示了车辆的中心点的位置,通过中心点轨迹也表示出了每个车辆的行驶路线。
[0037]
在s260中,车辆中心点轨迹中每个中心点作为顶点,车辆中心点轨迹中相邻中心点之间的轨迹作为边。一个中心点对应两个边,存在内角与外角,如图中所示。以车辙宽度的二分之一作为内角的角平分线,以车辙宽度的二分之一作为外角的角平分线,实现了向内角与外角构建长度为车辙宽度的角平分线,如图5中虚线段所示。角平分线的端点位置形成了车辆在每个时刻的车辙。将每个车辆在每个时刻的车辙的端点逐个进行连接,形成了每个车辆的车轮轨迹,如图5中实曲线线条所示。
[0038]
本实施例中,s270步骤的相关描述可参考上述实施例中s160的相关描述。s280步骤的相关描述可参考上述实施例中s170的相关描述。
[0039]
本技术提供的基于雷视融合的交叉路口导流线分析方法,基于视频图像数据与雷达探测数据对交叉路口进行实时测量,获得交叉路口处各个车辆的绝对时空信息。根据各个车辆的绝对时空信息,获得每个车辆的实际车辙宽度,并根据经纬度信息对路面上的实际车辙宽度投影至高精度地图中,模拟出每个车辆的模拟车辙宽度。根据每个车辆的模拟车辙宽度,以车辆中心点轨迹中每个中心点为顶点且相邻中心点的轨迹为边,分别向内角和外角构建角平分线,形成每个车辆在每个时刻的车辙。对每个车辆在每个时刻的车辙进行连接,形成了每个车辆的车轮轨迹,并基于每个车辆的车轮轨迹形成车轮轨迹热力图。从而,将车轮轨迹热力图转移至高精度地图中,可以实现对交叉路口的导流线的绘制合理性进行判断,判断是够绘制准确,完成了对交叉路口导流线施画合理性的分析,可以准确真实的反应车辆与道路导流线的关系。因此,通过本技术提供的基于雷视融合的交叉路口导流线分析方法,可以大面积对交叉路口的导流线的合理性进行分析处理,可以准确且广泛地给出交叉路口的导流线画线及轨迹分布,减少了人为试验统计,节省了人力且提高了分析效率,解决了传统采用泼水看车辙方法导致的耗费人力且效率偏低的问题。
[0040]
在一个实施例中,s150,以每个车辆在每个时刻的车辆经纬度为中心点,向垂直于车辆方向角方向进行模拟车辙宽度的线段延伸,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的车辙进行逐个端点连接,形成每个车辆的车轮轨迹之后,s160,对交叉路口的每个车辆的车轮轨迹进行热力图效果处理,获得交叉路口的车轮轨迹热力图之前,基于雷视融合的交叉路口导流线分析方法还包括:s151,根据地图信息中进出口方向以及车道信息,对每个车辆的车轮轨迹进行分类,形成进口方向车轮轨迹集、出口方向车轮轨迹集以及车道车轮轨迹集。
[0041]
本实施例中,结合交叉路口的实际车道、进口方向、出口方向进行分类,可以获得进口方向的车轮轨迹集、出口方向的车轮轨迹集以及各个车道对应的车轮轨迹集。通过对
车轮轨迹集进行分类,可以实现对不同导流线的正确性进行不同判断。通过进口方向车轮轨迹集、出口方向车轮轨迹集以及车道车轮轨迹集,可以分别实现对进口方向的导流线、出口方向的导流线以及各个车道的导流线进行合理性判断分析,有利于针对某一个交叉路口的某一个导流线进行判断分析。
[0042]
在一个实施例中,s160,对交叉路口的每个车辆的车轮轨迹进行热力图效果处理,获得交叉路口的车轮轨迹热力图,包括:s161,将交叉路口对应的进口方向车轮轨迹集中每个车轮轨迹进行热力图效果处理,获得进口车轮轨迹热力图;或者s162,将交叉路口对应的出口方向车轮轨迹集中每个车轮轨迹进行热力图效果处理,获得出口车轮轨迹热力图;或者s163,将交叉路口对应的车道车轮轨迹集中每个车轮轨迹进行热力图效果处理,获得车道车轮轨迹热力图。
[0043]
本实施例中,根据进口方向车轮轨迹集、出口方向车轮轨迹集以及车道车轮轨迹集分别进行热力图效果处理,能够分别获得对应的进口车轮轨迹热力图、出口车轮轨迹热力图以及车道车轮轨迹热力图。对进口方向车轮轨迹集中车轮轨迹以半透明且带有宽度的曲线进行叠加展示,凸显出进口方向车辆出现的高频率位置,可以表现出各个车辆的行驶位置重合度,以此来判断进口方向的导流线绘制是否合理。对出口方向车轮轨迹集中车轮轨迹以半透明且带有宽度的曲线进行叠加展示,凸显出出口方向车辆出现的高频率位置,可以表现出各个车辆的行驶位置重合度,以此来判断出口方向的导流线绘制是否合理。对车道车轮轨迹集中车轮轨迹以半透明且带有宽度的曲线进行叠加展示,凸显出每个车道上车辆出现的高频率位置,可以表现出各个车辆的行驶位置重合度,以此来判断每个车道的导流线绘制是否合理。
[0044]
在一个实施例中,s170,根据每个车辆在每个时刻的车辆经纬度,将交叉路口的车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的导流线绘制是否正确,包括:s171,根据每个车辆在每个时刻的车辆经纬度,将进口车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的进口方向的导流线绘制是否正确;或者s172,根据每个车辆在每个时刻的车辆经纬度,将出口车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的出口方向的导流线绘制是否正确;或者s173,根据每个车辆在每个时刻的车辆经纬度,将车道车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的车道的导流线绘制是否正确。
[0045]
本实施例中,进口车轮轨迹热力图通过多个车辆的车轮轨迹形成,车轮轨迹以车辆经纬度为中心点参考形成。高精度地图信息中包括了各个交叉路口、各个车道、各个进出口的经纬度信息。进口车轮轨迹热力图携带了各个位置的经纬度信息,基于经纬度信息将进口车轮轨迹热力图转移至高精度地图中进行分析,将进口车轮轨迹热力图体现在地图中对应的进口方向的位置。从而,根据高精度地图中进口方向的导流线与进口车轮轨迹热力图,可以分析出进口方向的导流线绘制是否准确。同理,出口车轮轨迹热力图携带了各个位置的经纬度信息,基于经纬度信息将出口车轮轨迹热力图转移至高精度地图中进行分析,将出口车轮轨迹热力图体现在地图中对应的出口方向的位置。从而,根据高精度地图中出口方向的导流线与出口车轮轨迹热力图,可以分析出出口方向的导流线绘制是否准确。同
理,车道车轮轨迹热力图携带了各个位置的经纬度信息,基于经纬度信息将车道车轮轨迹热力图转移至高精度地图中进行分析,将车道车轮轨迹热力图体现在地图中对应的车道位置。从而,根据高精度地图中车道的导流线与车道车轮轨迹热力图,可以分析出车道的导流线绘制是否准确。
[0046]
在一个实施例中,本技术提供一种基于雷视融合的交叉路口导流线分析系 统。基于雷视融合的交叉路口导流线分析系统包括数据获取模块、相对时空 信息获取模块、绝对时空信息获取模块、车辙宽度获取模块、第一车轮轨迹 获取模块、车轮轨迹热力图获取模块以及分析模块。数据获取模块用于获取 视频图像数据与雷达探测数据。相对时空信息获取模块用于将视频图像数据 与雷达探测数据进行数据融合,获得每个车辆相对于交叉路口的相对时空信 息。绝对时空信息获取模块用于获取交叉路口的地图信息,根据地图信息与 相对时空信息获得交叉路口的所有车辆的绝对时空信息。
[0047]
车辙宽度获取模块40用于根据每个车辆的绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据实际车辙宽度与绝对时空信息中车辆经纬度,获得实际车辙宽度的经纬度,并将实际车辙宽度的经纬度投影至地图信息中,获得每个车辆的模拟车辙宽度。第一车轮轨迹获取模块50用于以每个车辆在每个时刻的车辆经纬度为中心点,向垂直于车辆方向角方向进行模拟车辙宽度的线段延伸,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的车辙进行逐个端点连接,形成每个车辆的车轮轨迹。车轮轨迹热力图获取模块60用于对交叉路口的每个车辆的车轮轨迹进行热力图效果处理,获得交叉路口的车轮轨迹热力图。分析模块70用于根据每个车辆在每个时刻的车辆经纬度,将交叉路口的车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的导流线绘制是否正确。
[0048]
本实施例中,数据获取模块10的相关描述可参考上述实施例中s110的相关描述。相对时空信息获取模块20的相关描述可参考上述实施例中s120的相关描述。绝对时空信息获取模块30的相关描述可参考上述实施例中s130的相关描述。车辙宽度获取模块40的相关描述可参考上述实施例中s140的相关描述。第一车轮轨迹获取模块50的相关描述可参考上述实施例中s150的相关描述。车轮轨迹热力图获取模块60的相关描述可参考上述实施例中s160的相关描述。分析模块70的相关描述可参考上述实施例中s170的相关描述。
[0049]
在一个实施例中,基于雷视融合的交叉路口导流线分析系统100还包括车轮轨迹集获取模块。车轮轨迹集获取模块用于根据地图信息中进出口方向以及车道信息,对每个车辆的车轮轨迹进行分类,形成进口方向车轮轨迹集、出口方向车轮轨迹集以及车道车轮轨迹集。
[0050]
本实施例中,车轮轨迹集获取模块的相关描述可参考上述实施例中s151的相关描述。
[0051]
在一个实施例中,车轮轨迹热力图获取模块100包括进口车轮轨迹热力图获取模块、出口车轮轨迹热力图获取模块以及车道车轮轨迹热力图获取模块。进口车轮轨迹热力图获取模块用于将交叉路口对应的进口方向车轮轨迹集中每个车轮轨迹进行热力图效果处理,获得进口车轮轨迹热力图。或者,出口车轮轨迹热力图获取模块用于将交叉路口对应的出口方向车轮轨迹集中每个车轮轨迹进行热力图效果处理,获得出口车轮轨迹热力图。或者,车道车轮轨迹热力图获取模块用于将交叉路口对应的车道车轮轨迹集中每个车轮轨
迹进行热力图效果处理,获得车道车轮轨迹热力图。
[0052]
本实施例中,进口车轮轨迹热力图获取模块的相关描述可参考上述实施例中s161的相关描述。出口车轮轨迹热力图获取模块的相关描述可参考上述实施例中s162的相关描述。车道车轮轨迹热力图获取模块的相关描述可参考上述实施例中s163的相关描述。
[0053]
在一个实施例中,分析模块70包括第一分析判断模块、第二分析判断模块以及第三分析判断模块。第一分析判断模块用于根据每个车辆在每个时刻的车辆经纬度,将进口车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的进口方向的导流线绘制是否正确。或者,第二分析判断模块用于根据每个车辆在每个时刻的车辆经纬度,将出口车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的出口方向的导流线绘制是否正确。或者,第三分析判断模块用于根据每个车辆在每个时刻的车辆经纬度,将车道车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的车道的导流线绘制是否正确。
[0054]
本实施例中,第一分析判断模块的相关描述可参考上述实施例中s171的相关描述。第二分析判断模块的相关描述可参考上述实施例中s172的相关描述。第三分析判断模块的相关描述可参考上述实施例中s173的相关描述。
[0055]
在一个实施例中,本技术提供一种基于雷视融合的交叉路口导流线分析 系统。基于雷视融合的交叉路口导流线分析系统包括数据获取模块、相对时 空信息获取模块、绝对时空信息获取模块、车辙宽度获取模块、车辆中心点 轨迹获取模块、第二车轮轨迹获取模块车轮轨迹热力图获取模块以及分析模 块。数据获取模块用于获取视频图像数据与雷达探测数据。相对时空信息获 取模块用于将视频图像数据与雷达探测数据进行数据融合,获得每个车辆相 对于交叉路口的相对时空信息。
[0056]
绝对时空信息获取模块30用于获取交叉路口的地图信息,根据地图信息与相对时空信息获得交叉路口的所有车辆的绝对时空信息。车辙宽度获取模块40用于根据每个车辆的绝对时空信息中车辆型号与车辆宽度,获得每个车辆的实际车辙宽度,根据实际车辙宽度与绝对时空信息中车辆经纬度,获得实际车辙宽度的经纬度,并将实际车辙宽度的经纬度投影至地图信息中,获得每个车辆的模拟车辙宽度。车辆中心点轨迹获取模块410用于将每个车辆在每个时刻的绝对时空信息中车辆经纬度为中心点进行连接,获得每个车辆的车辆中心点轨迹。
[0057]
第二车轮轨迹获取模块510用于以车辆中心点轨迹中每个中心点为顶点且相邻中心点的轨迹为边,向内角与外角构建长度为车辙宽度的角平分线,获得每个车辆在每个时刻的车辙,并将每个车辆在每个时刻的车辙进行逐个端点连接,形成每个车辆的车轮轨迹。车轮轨迹热力图获取模块60用于对交叉路口的每个车辆的车轮轨迹进行热力图效果处理,获得交叉路口的车轮轨迹热力图。分析模块70用于根据每个车辆在每个时刻的车辆经纬度,将交叉路口的车轮轨迹热力图转移至地图信息中进行分析,判断交叉路口的导流线绘制是否正确。
[0058]
本实施例中,数据获取模块10的相关描述可参考上述实施例中s110的相关描述或者可参考s210的相关描述。相对时空信息获取模块20的相关描述可参考上述实施例中s120的相关描述或者可参考s220的相关描述。绝对时空信息获取模块30的相关描述可参考上述实施例中s130的相关描述或者可参考s230的相关描述。车辙宽度获取模块40的相关描述可参考上述实施例中s140的相关描述或者可参考s240的相关描述。车辆中心点轨迹获取模块
410的相关描述可参考上述实施例中s250的相关描述。第二车轮轨迹获取模块510的相关描述可参考上述实施例中s260的相关描述。车轮轨迹热力图获取模块60的相关描述可参考上述实施例中s270的相关描述或者上述实施例中s160的相关描述。分析模块70的相关描述可参考上述实施例中s280的相关描述或者上述实施例中s170的相关描述。
[0059]
上述各个实施例中,公开的过程中的步骤的特定顺序或层次是示例性方法的实例。基于设计偏好,应该理解,过程中的步骤的特定顺序或层次可以在不脱离本公开的保护范围的情况下得到重新安排。所附的方法权利要求以示例性的顺序给出了各种步骤的要素,并且不是要限于的特定顺序或层次。
[0060]
本领域技术人员还可以了解到本技术实施例列出的各种说明性逻辑块(illustrative logical block),模块和步骤可以通过电子硬件、电脑软件,或两者的结合进行实现。为清楚展示硬件和软件的可替换性(interchangeability),上述的各种说明性部件(illustrative components),模块和步骤已经通用地描述了它们的功能。这样的功能是通过硬件还是软件来实现取决于特定的应用和整个系统的设计要求。本领域技术人员可以对于每种特定的应用,可以使用各种方法实现所述的功能,但这种实现不应被理解为超出本技术实施例保护的范围。
[0061]
本技术实施例中所描述的各种说明性的逻辑块,或模块都可以通过通用处理器,数字信号处理器,专用集成电路(asic),现场可编程门阵列或其它可编程逻辑装置,离散门或晶体管逻辑,离散硬件部件,或上述任何组合的设计来实现或操作所描述的功能。通用处理器可以为微处理器,可选地,该通用处理器也可以为任何传统的处理器、控制器、微控制器或状态机。处理器也可以通过计算装置的组合来实现,例如数字信号处理器和微处理器,多个微处理器,一个或多个微处理器联合一个数字信号处理器核,或任何其它类似的配置来实现。
[0062]
本技术实施例中所描述的方法或算法的步骤可以直接嵌入硬件、处理器执行的软件模块、或者这两者的结合。软件模块可以存储于ram存储器、闪存、rom存储器、eprom存储器、eeprom存储器、寄存器、硬盘、可移动磁盘、cd-rom或本领域中其它任意形式的存储媒介中。示例性地,存储媒介可以与处理器连接,以使得处理器可以从存储媒介中读取信息,并可以向存储媒介存写信息。可选地,存储媒介还可以集成到处理器中。处理器和存储媒介可以设置于asic中,asic可以设置于用户终端中。可选地,处理器和存储媒介也可以设置于用户终端中的不同的部件中。
[0063]
以上所述的具体实施方式,对本技术的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本技术的具体实施方式而已,并不用于限定本技术的保护范围,凡在本技术的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1