组合式电力厂区报警系统、报警平台及使用方法与流程
1.本发明涉及一种组合式电力厂区报警系统、报警平台及使用方法,属于电力报警装置技术领域。
背景技术:
2.随着技术进步,平衡车、无人机等新兴技术对于电力厂区进行巡逻的方式逐渐被本领域技术人员采纳。然而,利用报警平台对电力厂区的外破隐患的可靠性识别需要进行训练。如何提高外破隐患报警的准确性成为巡检报警装置首先要克服的一点。单纯采用无人机进行报警识别,越来越容易造成训练模型的同质化。如何突破现有的识别模式,针对外破隐患进行高匹配度计算,实现更好的隐患识别效果,是目前报警平台更愿意解决的攻坚难题。
技术实现要素:
3.针对现有技术存在的上述隐患,本发明提出了一种组合式电力厂区报警系统、报警平台及使用方法,利用探测装置校准检测装置获取的外破隐患信息,使外破隐患的训练避免同质化,更匹配电力厂区隐患识别等级要求。
4.本发明所述的组合式电力厂区报警系统,包括电力厂区外破隐患的报警装置,以及组合于报警装置上的平衡装置、检测装置和探测装置,其中:平衡装置,包括圆环形的底座,底座外缘处安装有踏板,底座内部横跨有固定架,固定架中部两侧设置有滑轮,滑轮位于驱动底座运动;报警装置,包括控制主机、位于控制主机下方的升降杆以及位于控制主机顶部的举升装置,控制主机通过升降杆与平衡装置相连,控制主机通过举升装置与检测装置相连,升降杆驱动控制主机相对于底座上下运动,举升装置控制检测装置相对于控制主机上下摆动;检测装置,包括无人机、以及安装于无人机下方的传感器组,传感器组分别包括:传感器ⅰ,用于检测电力厂区外破隐患的温度;传感器ⅱ,用于检测电力厂区外破隐患的位置;传感器ⅲ,用于采集电力厂区外破隐患的红外线信息;工业相机,用于拍摄电力厂区外破隐患的图像信息;无人机通过举升装置举升至一定高度进行外破隐患检测,当外破隐患的高度超过范围时,无人机脱离举升装置单独飞行;探测装置,包括雷达探头和伸缩杆,伸缩杆的一端与控制主机相连,另一端与雷达探头相连,雷达探头与检测装置判断处的外破隐患处靠近,经由探测装置进行二次判断后,触发控制主机进行报警。
5.优选地,所述固定架中部通过升降杆与控制主机相连,升降杆与固定架可拆卸式连接,平衡装置内置有锂电池,锂电池通过升降杆为控制主机供电。
6.优选地,所述无人机上设置有通信模块和照明灯,无人机通过通信模块与控制主机或者远程服务器相连,无人机将收集到的温度、位置、红外线信息和图像信息通过通信模块反馈至远程服务器进行初始判断,无人机通过通信模块接收照明灯和传感器组开关命令。
7.优选地,所述控制主机内置有通信模块,控制主机通过通信模块接收远程服务器的探测指令,代表出现疑似外破隐患,控制主机驱动伸缩杆继续带动雷达探头靠近外破隐患进行雷达探测信息采集,通信模块将探测信息反馈至远程服务器进行二次判断,服务器进而通过通信模块下达启动报警的指令,控制主机启动声光报警器。
8.优选地,所述无人机通过电磁模块与举升装置相连,无人机与举升装置可分离式连接,电磁模块断电后无人机与举升装置分离;无人机内置有锂电池单独供电,电磁模块位于无人机上并通过锂电池供电。
9.本发明报警系统的有益效果是:改进现有的巡检报警装置,利用平衡装置对于带有举升装置和伸缩杆的控制主机进行动态平衡,实现底座始终稳定;利用举升装置和无人机组合的方式,实现对于疑似外破隐患进行不同盖度的检测;带有伸缩杆的雷达探头进行外破隐患的二次检测,对外破隐患的内部进行探测,进一步避免报警的误触发,作为人工巡检的适当可靠补充。
10.本发明所述的组合式电力厂区报警系统的报警平台,包括采用b/s架构的远程服务器, 远程服务器包括图像校正单元、历史数据存储单元、图像预测单元、隐患等级管理单元,其中:信息获取单元,用于接收无人机采集的温度、位置、红外线信息和图像信息,并通过识别信息中外破隐患的大小位置,初步判断是否出现疑似外破隐患;报警校正单元,用于精准下达滑轮移动的指令,保证伸缩杆精准带动雷达探头探测到外破隐患的雷达信息,二次判断是否出现真正外破隐患;历史数据存储单元,删除大小位置不符合要求的信息,保留采集符合要求的信息,并形成合集,便于后续进行预测和管理;信息预测单元,调取历史数据存储单元,对于信息中的像素变化率进行预测,结合时间上的演变,给外破隐患未来的隐患等级所用时间进行预测;隐患等级管理单元,记录各个电力厂区的所有隐患等级,并形成对应的特征记录在原始信息上,便于视觉神经网络的学习。
11.本发明报警平台的有益效果是:本发明利用信息获取单元、报警校正单元进行两次识别判断,然后利用提出的隐患等级演变算法得到变化率;最终利用历史信息数据得到一个或多个隐患等级形成的合集,最终作为视觉神经网络的训练模型。
12.本发明所述的组合式电力厂区报警系统的使用方法,包括如下步骤:s1:检测装置信息的获取:平衡装置带动报警装置沿电力厂区巡逻,通过举升装置将检测装置举升至一定高度进行检测;当电力厂区设备高度高于举升装置的高度时,无人机上的电磁模块断电脱离举升装置上升至电力厂区上方,利用传感器组对温度、位置、红外线信息和图像信息进行采集;s2:探测装置信息的校正:远程服务器根据无人机获取的信息进行初步判断,还需要利用探测装置进行外破隐患的再次校正判断,根据无人机检测到的大小位置,精准将探
测装置靠近外破隐患处,利用伸缩杆控制雷达探头的伸缩距离,雷达探头覆盖部分电力厂区,不仅探测外破隐患表面,而且探测外破隐患的内部;s3:历史数据定量分析:利用相同外破隐患在不同历史时期的信息变化,获取外破隐患变化率,预测信息中外破隐患属于哪个隐患等级的准确性,即:远程服务器采集到的信息记录有不同隐患等级的历史数据,通过形态处理后的图像中,某一隐患等级下的像素演变成为下一隐患等级的像素是确定的,捕捉到符合隐患等级下的像素后,叠加上参考图像的演变时间,则得出变化率;s4:隐患等级合集的确定:远程服务器通过定量分析后的图像进行分割处理,进而识别出图像中一个或多个外破隐患,并对图像上的一个或多个隐患设定一个或多个隐患等级;将一个或多个隐患等级形成合集,用于训练评估图像隐患等级的视觉神经网络;以及基于视觉神经网络形成一个或多个隐患等级的特征,并将该特征备注在相关图片上。
13.优选地,所述s2步骤中雷达探头覆盖部分电力厂区的范围确定方式,包括如下步骤:假设雷达探头距离外破隐患的距离为,则雷达电磁波的功率密度为:其中:为雷达探头的最大发射功率;为雷达探头的增益;若取功率密度的十分之一作为临界极限值,取雷达探头的长度为,假设雷达探头覆盖半径为:雷达探头覆盖部分电力厂区的范围是以雷达探头为圆心,以为半径的球形区域。
14.本发明使用方法有益效果是:整个报警方法区别于现有的巡检报警方式,更符合外破隐患的识别要求,检测效果更高。
附图说明
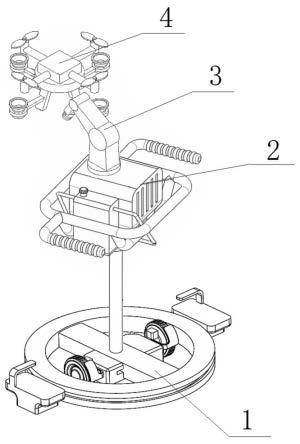
15.图1是本发明报警系统的结构示意图之一。
16.图2是本发明报警系统的结构示意图之二。
17.图3是探测装置结构示意图之一。
18.图4是探测装置结构示意图之二。
19.图5是本发明使用方法的流程原理框图。
20.图中:1、平衡装置;11、底座;12、踏板;13、滑轮;14、固定架;2、控制装置;21、升降杆;22、控制主机;23、把手;3、举升装置;4、检测装置;41、传感器ⅰ;42、传感器ⅱ;43、传感器ⅲ;44、工业相机;5、探测装置;51、雷达探头;52、伸缩杆。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
22.实施例1:如图1至图4所示,本发明所述的组合式电力厂区报警系统,包括电力厂区外破隐患的报警装置,以及组合于报警装置上的平衡装置1、检测装置4和探测装置5,其中:平衡装置1,包括圆环形的底座11,底座11外缘处安装有踏板12,底座11内部横跨有固定架14,固定架14中部两侧设置有滑轮13,滑轮13位于驱动底座11运动;报警装置,包括控制主机22、位于控制主机22下方的升降杆21以及位于控制主机22顶部的举升装置3,控制主机22通过升降杆21与平衡装置1相连,控制主机22通过举升装置3与检测装置4相连,升降杆21驱动控制主机22相对于底座11上下运动,举升装置3控制检测装置4相对于控制主机22上下摆动;检测装置4,包括无人机、以及安装于无人机下方的传感器组,传感器组分别包括:传感器ⅰ41,用于检测电力厂区外破隐患的温度;传感器ⅱ42,用于检测电力厂区外破隐患的位置;传感器ⅲ43,用于采集电力厂区外破隐患的红外线信息;工业相机44,用于拍摄电力厂区外破隐患的图像信息;无人机通过举升装置3举升至一定高度进行外破隐患检测,当外破隐患的高度超过范围时,无人机脱离举升装置3单独飞行;如图3和图4所示,探测装置5,包括雷达探头51和伸缩杆52,伸缩杆52的一端与控制主机22相连,另一端与雷达探头51相连,雷达探头51与检测装置4判断处的外破隐患处靠近,经由探测装置5进行二次判断后,触发控制主机22进行报警。
23.优选地,所述固定架14中部通过升降杆21与控制主机22相连,升降杆21与固定架14可拆卸式连接,平衡装置1内置有锂电池,锂电池通过升降杆21为控制主机22供电。
24.需要说明的是:固定架14与升降杆21拆分后,平衡装置1单独可作为日间人工巡检的工具;固定架14与升降杆21组合后,人工巡检也可以使用,双手直接搭在控制主机22两侧的把手23上,双腿直立站在踏板12上即可。
25.外破隐患包括违章施工、偷盗、外力冲撞、异物掉落等外力破坏的位置,识别方式包括外破隐患的温度、位置、红外线、图像信息和雷达信息。由于雷达耗电量大,且距离探测范围较大,因此单独用探测装置5进行辅助检测报警手段,其他传感器组由于耗电量少,则统一用无人机进行控制,作为主要的检测报警手段。
26.优选地,所述无人机上设置有通信模块和照明灯,无人机通过通信模块与控制主机22或者远程服务器相连,无人机将收集到的温度、位置、红外线信息和图像信息通过通信模块反馈至远程服务器进行初始判断,无人机通过通信模块接收照明灯和传感器组开关命令。
27.优选地,所述控制主机22内置有通信模块,控制主机22通过通信模块接收远程服务器的探测指令,代表出现疑似外破隐患,控制主机22驱动伸缩杆52继续带动雷达探头51靠近外破隐患进行雷达探测信息采集,通信模块将探测信息反馈至远程服务器进行二次判断,服务器进而通过通信模块下达启动报警的指令,控制主机22启动声光报警器。
28.优选地,所述无人机通过电磁模块与举升装置3相连,无人机与举升装置3可分离式连接,电磁模块断电后无人机与举升装置3分离;无人机内置有锂电池单独供电,电磁模块位于无人机上并通过锂电池供电。
29.实施例2:本发明所述的组合式电力厂区报警系统的报警平台,包括采用b/s架构的远程服务器, 远程服务器包括图像校正单元、历史数据存储单元、图像预测单元、隐患等级管理单元,其中:信息获取单元,用于接收无人机采集的温度、位置、红外线信息和图像信息,并通过识别信息中外破隐患的大小位置,初步判断是否出现疑似外破隐患;报警校正单元,用于精准下达滑轮13移动的指令,保证伸缩杆52精准带动雷达探头51探测到外破隐患的雷达信息,二次判断是否出现真正外破隐患;历史数据存储单元,删除大小位置不符合要求的信息,保留采集符合要求的信息,并形成合集,便于后续进行预测和管理;信息预测单元,调取历史数据存储单元,对于信息中的像素变化率进行预测,结合时间上的演变,给外破隐患未来的隐患等级所用时间进行预测;隐患等级管理单元,记录各个电力厂区的所有隐患等级,并形成对应的特征记录在原始信息上,便于视觉神经网络的学习。
30.实施例3:如图5所示,本发明所述的组合式电力厂区报警系统的使用方法,包括如下步骤:s1:检测装置信息的获取:平衡装置1带动报警装置沿电力厂区巡逻,通过举升装置3将检测装置4举升至一定高度进行检测;当电力厂区设备高度高于举升装置3的高度时,无人机上的电磁模块断电脱离举升装置3上升至电力厂区上方,利用传感器组对温度、位置、红外线信息和图像信息进行采集;s2:探测装置信息的校正:远程服务器根据无人机获取的信息进行初步判断,还需要利用探测装置5进行外破隐患的再次校正判断,根据无人机检测到的大小位置,精准将探测装置5靠近外破隐患处,利用伸缩杆52控制雷达探头51的伸缩距离,雷达探头51覆盖部分电力厂区,不仅探测外破隐患表面,而且探测外破隐患的内部;s3:历史数据定量分析:利用相同外破隐患在不同历史时期的信息变化,获取外破隐患变化率,预测信息中外破隐患属于哪个隐患等级的准确性,即:远程服务器采集到的信息记录有不同隐患等级的历史数据,通过形态处理后的图像中,某一隐患等级下的像素演变成为下一隐患等级的像素是确定的,捕捉到符合隐患等级下的像素后,叠加上参考图像的演变时间,则得出变化率;s4:隐患等级合集的确定:远程服务器通过定量分析后的图像进行分割处理,进而识别出图像中一个或多个外破隐患,并对图像上的一个或多个隐患设定一个或多个隐患等级;将一个或多个隐患等级形成合集,用于训练评估图像隐患等级的视觉神经网络;以及基于视觉神经网络形成一个或多个隐患等级的特征,并将该特征备注在相关图片上。
31.优选地,所述s2步骤中雷达探头51覆盖部分电力厂区的范围确定方式,包括如下步骤:假设雷达探头距离外破隐患的距离为,则雷达电磁波的功率密度为:
其中:为雷达探头的最大发射功率;为雷达探头的增益;若取功率密度的十分之一作为临界极限值,取雷达探头的长度为,假设雷达探头覆盖半径为:雷达探头覆盖部分电力厂区的范围是以雷达探头为圆心,以为半径的球形区域。
32.本发明可广泛运用于电力报警装置场合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1