一种地质灾害监测及预警系统的制作方法
一种地质灾害监测及预警系统
1.本分案申请的原始基础是申请号为202111237623.7,申请日为2021年10月22日,发明名称为“一种基于智能运动传感终端的通用物体运动分析系统”的专利申请,其要求了申请号为2021104084063,2021104099158,2021104086069,2021104085225和2021104100583的专利申请的优先权,优先权日为2021年4月15日。
技术领域
2.本发明涉及传感器检测技术领域,尤其涉及一种地质灾害监测及预警系统。
背景技术:
3.随着传感器技术的发展,越来越多的传感器被使用。但传感器技术功能单一。在需要采集多种数据的情况下,通常采用设置多种传感器的方式或对一种传感器采集的数据进行数学分析得到多种数据。基于传感器检测的运动分析系统在机械故障诊断、地质灾害监测、海洋灾害监测、土木工程结构安全监测和输电线工程安全监测等领域都有大量应用。
4.例如,公开号为cn106840095a的专利公开了一种并行多个倾角传感器芯片提高倾角仪测量精度的方法,首先采用多个mems倾角传感器芯片测量重力加速度倾角数据,并利用白噪声叠加原理提高系统信噪比,再将每个轴的重力加速度值转换成角度值从而得到高精度的倾角值,为保证测量精度,在pcb板上绘制定位丝印,保证每个mems倾角传感器芯片的轴对齐。该发明专利只是针对多个倾角传感器芯片进行设计,属于同一种传感器配置多个,只能采集一种参数。该发明虽然提高了精度但不能同时采集多种参数。
5.公开号为cn103630170b的中国发明专利公开了一种便携式多传感器无线传输巡检仪,包括:嵌入式处理器、检测模块、通讯模块、电源模块、存储模块、交互单元;所述的检测模块,包括:温度传感器、转速传感器、振动测量模块;所述的通讯模块,包括:usb接口、zigbee无线通讯模块;所述的zigbee无线通讯模块,包括:zigbee终端节点、zigbee协调器;所述的交互单元,包括:键盘、显示屏;所述的检测模块、通讯模块、电源模块、存储模块、交互单元均与嵌入式处理器相连;所述的温度传感器采用的是非接触式红外温度传感器;所述的振动测量模块采用的是sd14n14振动传感器;所述的电源模块采用9v可充电电池;所述的存储模块采用的是flash存储器;所述的温度传感器将数据通过iic协议存入flash存储器中;所述的嵌入式处理器通过uart串口协议将数据发送给zigbee无线通讯模块。其工作流程为:首先通过非接触式红外温度传感器采集温度数据,然后将数据通过iic协议存入eeprom存储器中;然后转速传感器采集转速数据,然后利用定时计数计算出转速值,存入eeprom存储器中;接着振动测量模块通过sd14n14振动传感器测量出振动数据,将测得的电压值经过放大、滤波、a/d转换处理,计算得到振动数据存入eeprom存储器;最后嵌入式处理器通过uart串口协议将数据发送给zigbee无线通讯模块,然后zigbee无线通讯模块中的zigbee终端节点将数据发送至zigbee协调器,最终上传至服务器。
6.公开号为cn106253943b的专利公开了一种基于lora技术的传感器采集器,传感器采集器包括处理器及与处理器连接的数据采集功能单元、第二lora无线模块、第二定时器,
采集器组件中的第一lora无线模块与传感器采集器中的第二lora无线模块进行无线通信连接。利用传感器采集器中第二lora无线模块自身的低功耗和高可靠性特点,并通过与处理器、数据采集功能单元的配合,通过断电、休眠、工作这三种状态的切换,降低每个传感器采集器的功耗,使每个功能模块在未使用的时候,处于断电或休眠状态,在保证可靠性的条件下,实现无线传感器的低功耗。
7.公开号为cn103745573b的中国发明公开了一种山洪泥石流地质灾害监控预警装置及方法。监控预警装置由1~n个编号的野外传感装置和一个终端报警装置组成,野外传感装置按离终端报警装置的距离由远到近依次顺序编列,终端报警装置对野外传感装置进行传输控制和信号采集。野外传感装置的传感器为多传感器组合,终端报警装置以无线通信接力传输方式采集野外传感装置的信号并进行控制,根据需要对野外传感装置的传感控制器中的通电控制模块进行间断供电控制,按照接力传输无线通信方式与野外传感装置进行传输控制。
8.本发明提供的的地质灾害监测及预警系统利用传感终端采集岩石或泥土的轨迹数据及振动数据,通过计算终端计算分析处岩石或泥土的振动幅度、滑动幅度等风险数据并将技术分析结果上传到云服务器实现对泥石流、崩塌、滑坡等地质灾害的监测及预警,进而实现灾情监测的数字化升级。
9.此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于申请人做出本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申请人保留在背景技术中增加相关现有技术之权利。
技术实现要素:
10.针对现有技术之不足,本发明提供了一种基于智能运动传感终端的通用物体运动分析系统。所述系统至少包括传感终端、计算终端和云服务器。所述传感终端对目标对象进行数据采集。所述计算终端接收所述传感终端采集的数据并对所述传感终端采集的数据进行计算分析。所述计算终端完成计算分析后将计算分析的结果发送至所述云服务器。所述云服务器响应于所述计算终端的计算分析结果进行相应管控。所述传感终端至少设置有处理模块、第一加速度传感组件和第二加速度传感组件。所述处理模块通过接口连接所述第一加速度传感组件和所述第二加速度传感组件从而实现对所述第一加速度传感组件和所述第二加速度传感组件的数据接收和电源控制。在实际使用中,本通用物体运动分析系统的传感终端通过集成多种传感组件可以在一块传感终端上采集多种数据,以对振动、轨迹、姿态等物体运动进行分析。本发明的通用物体运动分析系统能够在低功耗状态下完成传感数据的采集和计算分析。优选地,本通用物体运动分析系统的传感终端可以根据采集的数据改变传感组件的通电状态。所述传感终端在提供准确的数据使得本发明的系统可以进行物体运动分析的情况下以最低功耗进行传感数据的采集。
11.根据一种优选实施方式,所述传感终端包括有线传感终端和无线传感终端两种。所述有线传感终端能够通过与通信端口连接的数据线传输采集的数据。所述无线传感终端能够通过配置的第一lora通信单元以无线传输的方式将采集到的数据发送至所述计算终端进行计算分析。本发明的通用物体运动分析系统可以配置有两种传感终端以满足不同使
用环境下的物体运动分析。优选地,在有线供电、对数据的实时性要求较高等使用环境中,本发明可以使用有线传感终端对传感数据进行采集而后通过对传感数据的处理进行物体运动分析。优选地,在需要大量或大范围部署传感器的使用环境中,本发明进行物体运动分析的数据来自无线传感终端。
12.根据一种优选实施方式,所述计算终端利用配置的4g通信单元与所述云服务器建立通信将所述计算终端通过配置的第二lora通信单元或通信端口接收到的所述传感终端采集的数据进行计算分析后生成的计算分析结果上传至所述云服务器。所述传感终端对目标对象进行数据采集后通过有线或无线的数据传输方式将采集到的数据传输至所述计算终端。所述计算终端通过对所述传感终端采集的数据进行计算分析实现对物体运动的分析。所述计算终端借助配置的4g通信单元将物体运动的分析结果发送至所述云服务器。
13.根据一种优选实施方式,所述处理模块至少具有第一状态和不同于第一状态的第二状态。所述第一加速度传感组件能够通过接口控制所述处理模块第一状态和第二状态的切换进而控制所述第二加速度传感组件的启用/休眠。优选地,所述处理模块处于第一状态时所述第二加速度传感组件处于休眠状态。所述处理模块处于第二状态时所述第二加速度传感组件处于工作状态。所述处理模块处于第一状态时通过所述第一加速度传感组件采集物体运动分析所需数据。所述处理模块处于第二状态时通过所述第二加速度传感组件采集物体运动分析所需数据。
14.根据一种优选实施方式,所述第一加速度传感组件和所述第二加速度传感组件按照彼此轴向平齐使得采集到的数据对齐的方式设置于同一板体,便于所述处理模块对所述第一加速度传感组件和所述第二加速度传感组件采集的数据进行处理。所述第一加速度传感组件和所述第二加速度传感组件同属以加速度计为核心器件的传感组件。所述第一加速度传感组件和所述第二加速度传感组件按照轴对齐的方式设置在同一电路结构的板体上,使得传感组件的至少一个参数(例如位置高度、相对坐标等)相同,从而能够减少所述处理模块在对传感组件所采集数据进行融合处理时所需要处理的参数,实现快速处理,间接地减少了本发明在进行物体运动分析时所花费的时间。
15.根据一种优选实施方式,所述处理模块包括处理芯片、随机存储器和只读存储器。所述处理芯片分别与随机存储器和只读存储器电信号连接。所述处理模块能够通过第一状态和第二状态的切换实现对随机存储器和只读存储器的电源的通断控制。优选地,所述随机存储器和所述只读存储器的电源导通时,所述处理模块能够以最高性能对传感组件采集的数据进行处理和传输,便于后续所述计算终端对物体运动进行计算分析。
16.根据一种优选实施方式,所述第二加速度传感组件至少包括第二加速度传感器、滤波器、电压跟随器和高速adc。所述第二加速度传感器采集到的交流单轴向的数据需依次经过所述滤波器、所述电压跟随器和所述高速adc后通过通信协议接口传输至所述处理模块进行处理。优选地,在初次安装所述传感终端对目标对象进行数据采集时第二加速度传感组件处于休眠状态。当且仅当传感终端中设置的第一加速度传感组件向传感终端的处理模块发送需要唤醒第二加速度传感组件的指令时,处理模块才会唤醒第二加速度传感组件进行数据采集。优选地,当第二加速度传感组件进行数据采集时,计算终端基于第二加速度传感组件所采集的数据进行物体运动的计算分析。
17.根据一种优选实施方式,所述传感终端的有线传感终端型号能够通过通信端口有
线连接至中继器。所述中继器通过配置的第三lora通信单元与所述计算终端配置的第二lora通信单元建立无线通信。所述有线传感终端能够通过所述中继器间接将采集到的数据发送到所述计算终端进行计算分析。
18.根据一种优选实施方式,所述传感终端的无线传感终端型号能够通过配置的第一lora通信单元直接与所述计算终端配置的第二lora通信单元建立无线通信,从而直接将采集到的数据发送到所述计算终端进行计算分析。优选地,在需要大范围部署传感终端且不便于部署数据传输线路的使用环境中,无线传感终端可以利用配置的第二lora通信单元将物体运动分析所需的数据传输至计算终端。
19.根据一种优选实施方式,所述传感终端的有线传感终端型号能够通过通信端口有线连接至所述计算终端的方式与所述计算终端建立起实时数据连接,从而直接将采集到的数据实时发送到所述计算终端进行计算分析。优选地,在适合有线供电不需要考虑功耗且对数据有实时性要求的环境中,传感终端能够通过通信端口与有线传感终端有线连接,接收有线传感终端的数据进行计算分析从而保证对物体运动分析的实时性。
附图说明
20.图1是本发明提供的一种优选实施方式的通用物体运动分析系统的简化网络拓扑结构图;
21.图2是本发明提供的一种优选实施方式的有线传感终端的简化示意图;
22.图3是本发明提供的一种优选实施方式的无线传感终端的简化示意图;
23.图4是本发明提供的一种优选实施方式的计算终端的简化示意图;
24.图5是本发明提供的一种优选实施方式的中继器的简化示意图;
25.图6是本发明提供的一种优选实施方式的传感终端的电路板结构简化示意图;
26.图7是本发明提供的一种优选实施方式的处理芯片的简化电路示意图;
27.图8是本发明提供的一种优选实施方式的随机存储器的简化电路示意图;
28.图9是本发明提供的一种优选实施方式的只读存储器的简化电路示意图;
29.图10是本发明提供的一种优选实施方式的第一加速度传感组件的简化电路示意图;
30.图11是本发明提供的一种优选实施方式的温度传感组件的简化电路示意图;
31.图12是本发明提供的一种优选实施方式的第二加速度传感组件的简化电路示意图;
32.图13是本发明提供的一种优选实施方式的第二加速度传感器的电源控制电路示意图;
33.图14是本发明提供的一种优选实施方式的第一lora通信单元的简化电路示意图;
34.图15是本发明实施例2提供的一种优选实施方式的传感终端的简化示意图;
35.图16是本发明提供的一种优选实施方式的惯性测量传感组件的简化电路示意图;
36.图17是本发明提供的一种优选实施方式的倾角传感组件的简化电路示意图;
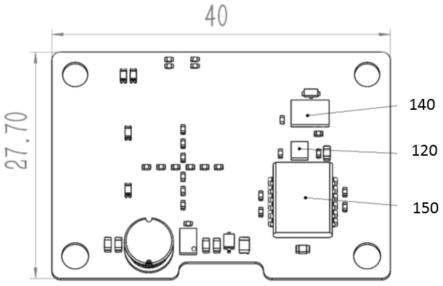
37.图18是本发明实施例2提供的一种优选实施方式的传感终端的电路板结构简化示意图。
38.附图标记列表
39.100:传感终端;101:有线传感终端;102:无线传感终端;110:处理模块;111:处理芯片;112:随机存储器;113:只读存储器;120:第一加速度传感组件;130:温度传感组件;140:惯性测量传感组件;150:倾角传感组件;160:第二加速度传感组件;161:第二加速度传感器;162:滤波器;163:电压跟随器;164:高速adc;165:第二加速度传感器电源控制电路;170:第一lora通信单元;200:计算终端;210:计算分析模块;220:通信端口;221:高速通信端口;222:低速通信端口;230:第二lora通信单元;240:4g通信单元;300:云服务器;400:中继器;410:第三lora通信单元。
具体实施方式
40.下面结合附图进行详细说明。
41.随着传感器技术的发展,越来越多的传感器被使用。但传感器技术功能单一。在需要采集多种数据的情况下,通常采用设置多种传感器的方式或对一种传感器采集的数据进行数学分析得到多种数据。本发明通过对电路结构进行设计将多种传感组件融合到一个传感终端上,使得在需要采集多种数据的情况下,仅需要设置一个传感终端便可以实现多种数据的采集,从而对物体的振动、轨迹、姿态等进行分析。本发明融合的多传感组件可以包括第一加速度传感组件、惯性测量传感组件和倾角传感组件。各传感组件均与处理模块连接,当被检测设备产生数据时,比如检测到设备震动,振动传感器便会产生一个信号通知处理模块,处理模块唤醒相应传感器采集数据,并将采集数据发送给计算终端进行物体运动分析。本发明提供的通用物体运动分析系统,能在机械故障诊断及预测性维护、地质灾害监测及预警、海洋灾害监测及预警、土木工程结构安全监测及预警、输电线路工程安全监测及预警等行业中解决物体的振动、轨迹、姿态分析等问题。
42.实施例1
43.在本实施例中本发明提供的一种基于智能运动传感终端的通用物体运动分析系统可以是机械故障诊断及预测性维护系统。本发明提供的通用物体运动分析系统通过传感终端100对目标对象的高频振动加速度数据进行采集。传感终端100将采集到的数据发送至计算终端200进行处理。计算终端200通过对传感终端100采集数据的计算分析得出目标对象的有效振动速度、有效振动幅度、振动频谱等特征结果。计算终端200将得出的特征结果上传到云服务器平台从而实现数字化的机械故障诊断及预测性维护。
44.本实施例提供的机械故障诊断及预测性维护系统至少包括传感终端100、计算终端200和云服务器300。传感终端100对目标对象进行数据采集。计算终端200接收传感终端100采集的数据并对传感终端100采集的数据进行计算分析。计算终端200完成计算分析后将计算分析的结果发送至云服务器300。云服务器300响应于计算终端200的计算分析结果进行相应管控。参见图1,计算终端200分别与云服务器300和至少一个传感终端100建立数据连接。优选地,计算终端200可以同时连接两个以上的传感终端100。计算终端200通过对传感终端100采集的数据进行计算分析得出目标对象的运动特征结果。运动特征结果包括有效振动速度、有效振动幅度、振动频谱等。计算终端200得出目标对象的运动特征结果后将得到的计算结果发送至云服务器300,云服务器300基于计算终端200的分析结果向管理目标对象的用户下达故障排除指令或故障预警,实现对机械(目标对象)的故障诊断及预测性维护。例如风场发电的发电机组在环境风力过大时,会导致风力发电机组产生异常振动,
本实施例的机械故障诊断及预测性维护系统能够用于风力发电场的巡检工作。
45.本实施例的传感终端100可以设置有处理模块110、第一加速度传感组件120和第二加速度传感组件160。传感终端100的第一加速度传感组件120和第二加速度传感组件160可以采集目标对象(如风力发电机组风叶)的振动数据。由于发电机组设备的材料性质会受到温度的影响,例如发电机组风叶与转轴连接部分会因旋转摩擦生热,为排除温度因素传感终端100还设置有温度传感组件130。
46.优选地,为能够在不同使用环境下进行数据采集,本实施例的传感终端100设置有如图2所示的有线传感终端101和如图3所示的无线传感终端102两种型号。有线传感终端101能够通过与通信端口220连接的数据线传输采集的数据。优选地,通信端口220包括高速通信端口221和低速通信端口222。无线传感终端102能够通过配置的第一lora通信单元170以无线传输的方式将采集到的数据发送至计算终端200进行计算分析。本发明的通用物体运动分析系统可以配置有两种传感终端100以满足不同使用环境下的物体运动分析。优选地,在有线供电、对数据的实时性要求较高等使用环境中,本发明可以使用有线传感终端101对传感数据进行采集而后通过对传感数据的处理进行物体运动分析。优选地,在需要大量或大范围部署传感器的使用环境中,本发明进行物体运动分析的数据来自无线传感终端102。
47.参见图2和图3,温度传感组件130、第一加速度传感组件120和第二加速度传感组件160分别通过接口连接至处理模块110。优选地,各传感组件与处理模块110连接的接口可以是支持如spi等通信协议的接口。各传感组件通过通信协议接口将采集到的数据传输至处理模块110进行处理。优选地,第二加速度传感组件160至少包括第二加速度传感器161、滤波器162、电压跟随器163和高速adc164。第二加速度传感器161采集到的交流单轴向的数据需依次经过滤波器162、电压跟随器163和高速adc164后通过通信协议接口传输至处理模块110进行处理。优选地,第一加速度传感组件120可以包括第一加速度传感器。优选地,处理模块110包括处理芯片111、随机存储器112和只读存储器113。处理芯片111分别与随机存储器112和只读存储器电信号连接。
48.本实施例的计算终端200接收由传感终端100采集的目标对象的振动数据,并基于振动数据进行计算分析得出振动速度、振动幅度、振动频谱等分析结果,并将分析结果传输至云服务器实现对目标对象的监管。
49.参见图4,计算终端200包括计算分析模块210、通信端口220、第二lora通信单元和4g通信单元。通信端口220、第二lora通信单元和4g通信单元分别与计算分析模块210电信号连接。计算终端200通过配置的第二lora通信单元230或通信端口220接收传感终端100采集的数据。第二lora通信单元230或通信端口220将接收的数据传输至计算分析模块210进行计算和分析。计算分析模块210响应于收到的数据通过预设程序进行计算分析得出至少包括振动速度、振动幅度、振动频谱等运动状态参数的分析结果。计算分析模块210将分析结果传输至4g通信单元240通过4g通信网络将分析结果传输给云服务器300。换言之,计算终端200利用配置的4g通信单元240与云服务器300建立通信将计算终端200通过配置的第二lora通信单元230或通信端口220接收到的传感终端100采集的数据进行计算分析后生成的计算分析结果上传至云服务器300。传感终端100对目标对象进行数据采集后通过有线或无线的数据传输方式将采集到的数据传输至计算终端200。计算终端200通过对传感终端
100采集的数据进行计算分析实现对物体运动的分析。计算终端200借助配置的4g通信单元240将物体运动的分析结果发送至云服务器300。优选地,通信端口220包括高速通信端口221和低速通信端口222。优选地,高速通信端口221可以是ieee 1588poe高速接口。优选地,低速通信端口222可以是rs485低速接口。
50.优选地,在适合有线供电不需要考虑功耗且对数据有实时性要求的环境中,传感终端100优选采用有线传感终端101。有线传感终端101能够通过通信端口220与有线传感终端101有线连接,接收有线传感终端101的数据进行计算分析从而保证对物体运动分析的实时性。优选地,有线传感终端101能够通过通信端口220有线连接至计算终端200的方式与计算终端200建立起实时数据连接,从而直接将采集到的数据实时发送到计算终端200进行计算分析。
51.优选地,在对数据实时性要求较低且需要大量部署传感器的场合采用无线传感终端102。优选地,传感终端100的无线传感终端102型号能够通过配置的第一lora通信单元170直接与计算终端200配置的第二lora通信单元230建立无线通信,从而直接将采集到的数据发送到计算终端200进行计算分析。优选地,在需要大范围部署传感终端100且不便于部署数据传输线路的使用环境中,无线传感终端102可以利用配置的第二lora通信单元230将物体运动分析所需的数据传输至计算终端200。
52.优选地,在要求多个传感终端100同步采集数据且功耗低的使用环境中,本实施例系统的部署可以是将至少一个有线传感器101通过通信端口220有线连接至中继器400,然后中继器400通过配置的第三lora通信单元410与计算终端200配置的第二lora通信单元230建立无线通信进而将有线传感器101采集的数据发送至计算终端200进行计算分析。优选地,两个及以上数量的有线传感终端101通过通信端口220有线连接至中继器400。中继器400通过配置的第三lora通信单元410与计算终端200配置的第二lora通信单元230建立无线通信。中继器400以有线通信的方式接收多个有线传感终端101采集的数据,然后通过无线通信的方式将接收到的数据发送到计算终端200进行计算分析,从而保证了多个传感终端100的同步性。又因为中继器400的功耗较计算终端200更低,且系统中的lora通信单元能够选择性开启(需要传输数据时启动,不需要传输数据时休眠)。相较于计算终端200持续开启通信端口220接收有线传感终端101所采集数据的方式采用中继器400的数据传输方式能够降低本系统的功耗。参见图5,中继器400设置有第三lora通信单元410和低速通信端口222。只设置低速通信端口222的原因是中继器400在进行lora通信时的通信速度明显低于有线通信,不符合高速通信需求,因此中继器400未配置高速通信端口221。
53.第一加速度传感组件120和第二加速度传感组件160按照彼此轴向平齐使得采集到的数据对齐的方式设置于同一板体,便于处理模块110对第一加速度传感组件120和第二加速度传感组件160采集的数据进行处理。具体地,参见图5,第一加速度传感组件120的第一加速度传感器和第二加速度传感组件160的第二加速度传感器161按照轴向对齐的方式设置在同一板体上。优选地,第一加速度传感组件120和第二加速度传感组件160通过轴对齐的方式设置在同一板体后,第一加速度传感组件120和第二加速度传感组件160在进行数据采集时至少有一个基准参数是相同的,便于终端100的处理模块110对来自不同传感组件的数据进行融合处理。优选地,第一加速度传感组件120和第二加速度传感组件160的核心器件都包括加速度计。本实施例的传感终端100可以将多个以加速度计为核心器件的传感
组件按照轴对齐的方式设置在同一电路结构的板体上,使得众传感组件的至少一个参数(例如位置高度、相对坐标等)相同,从而能够减少传感终端100的处理模块110和计算终端200在对众传感组件所采集数据进行融合处理时所需要处理的参数,实现快速,处理间接地减少了本发明在进行物体运动分析时所花费的时间。优选地,第一加速度传感组件120和第二加速度传感组件160设置在板体上远离周围机械安装孔的位置,从而避免外部的应力传递到传感器上。本实施例的传感终端100将各传感组件居中靠内放置在电路板上,避免因对传感终端100进行封装使电路板产生的应力传递到电路板上放置的传感组件导致传感组件的采集数据结果不准确。
54.优选地,处理模块110通过接口接收到传感组件发送的数据,从而对接收到的数据进行处理。图7所示的是处理模块110的处理芯片电路示意图。优选地,处理芯片111可以是stm32f446zet6。图8是本发明传感终端100的一个优选的随机存储器112电路示意图。优选地,随机存储器为至少包括sdram和psram在内的ram芯片。优选地,随机存储器112可以是sdram。优选地,处理模块110集成了2mbytes大容量sdram芯片。优选地,sdram电源可控,在不采集数据的关闭,降低系统功耗。在需要采集波形数据时,需要大容量存储单元来存储波形数据,此时处理模块110会打开大容量psram芯片的电源开关。图9是本发明终端100的一个优选的只读存储器113电路示意图。优选地,只读存储器113可以是flash。优选地,只读存储器113通过接口与处理模块110连接。优选地,接口可以是spi接口和/或i/o接口。优选地,只读存储器113的供电能够通过信号控制。在不使用只读存储器113的情况下,传感终端100能够切断只读存储器113的供电。
55.处理模块110至少具有第一状态和不同于第一状态的第二状态。第一加速度传感组件120能够通过控制处理模块110第一状态和第二状态的切换进而控制第二加速度传感组件160的启用/休眠。特别地,对于无线传感终端101而言,第一加速度传感组件120还能够通过控制处理模块110第一状态和第二状态的切换进而控制lora通信单元170的启用/休眠。在实际部署中,为降低传感终端100的使用功耗,第二加速度传感组件160和/或lora通信单元170默认处于休眠状态,处理模块110处于只有部分组件在工作的第一状态,第一加速度传感组件120处于正常工作状态。当且仅当第一加速度传感组件120采集的数据出现异常时,处理模块110才会由第一状态进入第二状态。进入第二状态的处理模块110用过预设程序对第一加速度传感组件120采集的数据并确定是否开启第二加速度传感组件160和/或lora通信单元170。在第一加速度传感组件120采集的数据未出现异常时,传感终端100的大量部件(如第二加速度传感组件160和lora通信单元170等)处于休眠状态,使得传感终端100能够进行低功耗的数据采集。
56.优选地,处理模块110能够通过第一状态和第二状态的切换实现对随机存储器112和只读存储器113的电源的通断控制。优选地,随机存储器112和只读存储器113的电源导通时,处理模块110能够以最高性能对传感组件采集的数据进行处理和传输,便于后续计算终端200对物体运动进行计算分析。处理芯片111分别与随机存储器112和只读存储器电信号连接。当且仅当处理模块110处于第二状态时,处理芯片111才会发出信号打开随机存储器112和只读存储器113的电源使之工作。处理模块110在处于第一状态时,处理芯片111通过电信号断开随机存储器112和只读存储器113的电源使之休眠,避免随机存储器112和只读存储器113在非工作情况下产生功耗使得整个终端100的功耗较高。优选地,处理模块110的
第一状态为休眠状态,处理模块110的第二状态为工作状态。处理模块110可以通过接口控制第一加速度传感组件120、第二加速度传感组件160和/或lora通信单元170的供电。当处理模块110处于第一状态时,为降低终端100的功耗,处理模块110通过接口发送信号切断第二加速度传感组件160和/或lora通信单元170的供电使得第二加速度传感组件160和/或lora通信单元170进入休眠。在第二加速度传感组件160和/或lora通信单元170休眠时,处理模块110能够通过接口发送信号导通第一加速度传感组件120的供电,保证第一加速度传感组件120能够正常稳定地进行工作,从而使得终端能够在满足数据采集的情况下降低功耗。优选地,在处理模块110处于第一状态的情况下,处理模块110能够断开第二加速度传感组件160和lora通信单元170的供电,导通第一加速度传感组件120的供电,使得传感终端100能够以最低功耗工作。
57.优选地,第一加速度传感器可以是mems高频加速度传感器,具体型号可以是kx132。图10是一个优选的第一加速度传感组件120电路示意图。优选地,mems高频加速度传感器采用高频加速度传感器kx132。此传感器专门针对于高频振动分析设计,传感器输出频率最高达到25.6khz,输出带宽最高达到8.2khz,相比于传统的加速度传感器,本发明使用的高频加速度传感器测量高频振动效果更好,通过传感器的加速度信号分析振动频率的准确度更高。优选地,第一加速度传感组件120、第二加速度传感组件160配置为通过处理模块110的i/o口的电流来驱动以控制开启/关闭。融合多种传感组件的传感终端100的处理模块110在被第一加速度传感组件120唤醒后可以通过运行预设程序经由第二加速度传感组件160的i/o口向第二加速度传感组件160供电,从而开启第二加速度传感组件160使得第二加速度传感组件160进行数据采集。如图5所示,第一加速度传感组件120的供电可以通过信号控制。优选地,处理模块110能够通过接口发送信号打开或关闭第一加速度传感组件120的供电。部署终端100的技术人员通过对现场需要传感的数据进行分析,对第一加速度传感组件120设置相应的响应阈值。优选地,在第一加速度传感组件120采集的数据超过预设阈值的情况下,第一加速度传感组件120产生中断信号通过与处理模块110连接的接口将中断信号传送至处理模块110从而将处理模块110唤醒。处理模块110接收到中断信号后由第一状态进入第二状态实现唤醒。优选地,当第一加速度传感组件120采集的数据超过预设阈值即视为采集的数据出现异常,需要请求处理模块110对异常进行判定,因此处理模块110产生中断信号并通过与处理模块110连接的接口将中断信号传送至处理模块110。处理模块110响应于“中断信号之收到”由部分器件休眠的低功耗的第一状态进入所有器件工作的功耗较高的第二状态,对第一加速度传感组件120采集的数据进行分析。优选地,终端100在需要对第一加速度传感组件120采集的数据进行分析时才会使得处理模块110进入功耗较高的第二工作状态,在不需要对第一加速度传感组件120采集的数据进行分析时处理模块110处于低功耗的第一工作状态,从而在终端100进行长期的数据采集时避免处理模块110一直处于功耗较高的第二工作状态,进而降低终端100进行数据采集时的功耗。
58.优选地,传感终端100配置的温度传感组件130通过接口与处理模块110连接。温度传感组件130将测量到的温度数据通过接口传输给处理模块110。图6是一个优选的温度传感组件电路示意图。优选地,温度传感组件130可以是mems温度传感器。优选地,mems温度传感器采用ds18b20。在不需要使用温度传感组件130的情况下,温度传感组件130的供电被关闭,从而降低系统功耗。如图11所示,该传感组件的供电可以通过信号控制。优选地,处理模
块110能够通过接口发送信号控制温度传感组件130的供电模式。优选地,在不传感温度的情况下,处理模块110能够关闭温度传感组件130的供电,降低系统功耗。优选地,部署终端的技术人员可以根据对目标对象的分析设置温度传感组件130的工作方式。优选地,温度传感组件130的工作方式可以是处理模块110进入第二状态后通过发送信号使温度传感组件130正常供电,进而温度传感组件130开始工作进行数据采集。
59.图12所表示的是一个优选的第二加速度传感组件160电路。第二加速度传感器161输出模拟信号,经过滤波器162、电压跟随器163、高速adc164采样,输出至处理模块110进行处理。参见图12,处理模块110通过第二加速度传感器电源控制电路165使得第二加速度传感器上电工作后,第二加速度传感器161经过滤波器162、电压跟随器163后,通过高速adc164采样第二加速度传感器161的电压信号,再通过spi总线连至处理模块110,实现对第二加速度传感器161电压信号的采集,第二加速度传感组件160系统高度集成。优选地,第二加速度传感器161可以是adxl100x系列mems-iepe芯片。优选地,滤波器162可以是带限滤波器。优选地,带限滤波器电路主要由运算放大器和至少一个电阻以及至少一个电容组成。优选地,电压跟随器163由至少两个运算放大器组成。优选地,运算放大器可以是opa4325。优选地,高速adc芯片可以是mcp3561。adxl100x芯片在供电电压为5v的情况下噪声最低。为了提高第二加速度传感组件160的数据采集准确度,本实施例通过第二加速度传感器电源控制电路165控制adxl100x的供电。图13是本发明终端的一个优选的第二加速度传感器电源控制电路示意图。mems-iepe芯片后级接入带限滤波器,增加传感器的高频响应的准确度。高速adc164单元,供电为3v3。带限滤波器电路将放大器的输出经过电阻分压后输出到电压跟随器使得5v信号线性缩小到3v3范围,经过电压跟随器163后,mems-iepe芯片信号的阻抗降低,使得高速adc164采样更加准确。参见图13,优选地,处理模块110在启用第二加速度传感组件160的情况下,通过接口发送信号切断第一加速度传感组件120的供电。优选地,第二加速度传感组件160能够采集的数据的频率高于第一加速度传感组件120能够采集的数据的频率。频率范围适用于第二加速度传感组件160的数据被第一加速度传感组件120采集时会出现数据失真等问题,频率范围适用于第一加速度传感组件120的数据被第二加速度传感组件160采集时同样会出现数据失真等问题,为避免出现数据失真等资料问题和同时开启第一加速度传感组件120和第二加速度传感组件160导致终端100功耗高的问题,处理模块110在启用第二加速度传感组件160的情况下切断第一加速度传感组件120的供电,从而使得终端100能够进行低功耗的准确的数据采集。
60.图14是本发明提供的一种优选实施方式的第一lora通信单元170的简化电路示意图。本实施例中的无线传感终端102设置有第一lora通信单元170。参见图14,第一lora通信单元170通过接口与处理模块110连接。在不使用第一lora通信单元170的情况下,处理模块110通过信号关闭第一lora通信单元170的供电,降低系统功耗。优选地,第一lora通信单元170的供电通过处理模块110的信号控制。处理模块110仅仅在需要发送数据的时候打开第一lora通信单元170,进而将数据发送至一直开启lora信号接收的计算终端200。优选地,第一lora通信单元170采用ra-01s型号的lora模组。ra-01s型号的lora模组可以用于超长距离扩频通信,抗干扰性强,能够最大限度降低电流消耗。优选地,处于第二状态的处理模块110能够通过接口接收由第一加速度传感组件120和/或第二加速度传感组件160采集的数据进行处理并通过第一lora通信单元170将处理后的数据发送至计算终端200。优选地,接
口可以是spi接口和/或i/o接口。优选地,处理模块110将第一加速度传感组件120和/或第二加速度传感组件160采集的数据进行处理后必须通过第一lora通信单元170将处理后的数据发送至计算终端200。优选地,处理模块110仅在需要通过第一lora通信单元170向计算终端200发送处理后的数据时才会通过接口打开第一lora通信单元170的电源,启动第一lora通信单元170使之能够将处理模块110处理后的数据发送至计算终端200。待第一lora通信单元170完成数据发送后处理模块110关闭第一lora通信单元170的电源,使得第一lora通信单元170进入休眠。本实施例的传感终端100在需要向计算终端200发送数据时才启用第一lora通信单元170,其他时刻使第一lora通信单元170进入休眠,从而避免因第一lora通信单元170持续开启造成功耗浪费,降低了传感终端100进行数据采集时的功耗进而使得本实施例所提供的机械故障诊断及预测性维护系统的功耗降低。
61.优选地,在初次安装传感终端100对目标对象进行数据采集时第二加速度传感组件160处于休眠状态。当且仅当传感终端100中设置的第一加速度传感组件120向传感终端100的处理模块110发送需要唤醒第二加速度传感组件160的指令时,处理模块110才会唤醒第二加速度传感组件160进行数据采集。优选地,当第二加速度传感组件160进行数据采集时,计算终端200基于第二加速度传感组件160所采集的数据进行物体运动的计算分析。本实施例的机械故障诊断及预测性维护系统能够在低功耗状态下完成传感数据的采集和计算分析。优选地,本机械故障诊断及预测性维护系统的传感终端100可以根据采集的数据改变传感组件的通电状态。传感终端100在提供准确的数据使得本实施例的机械故障诊断及预测性维护系统在可以进行物体运动分析的情况下能够以最低功耗进行传感数据的采集。
62.实施例2
63.本实施例是对实施例1的进一步改进,重复的内容不再赘述。本发明提供的一种基于智能运动传感终端的通用物体运动分析系统可以是土木工程结构安全监测及预警系统。在土木工程结构安全监测及预警领域本发明的通用物体运动分析系统能够采集振动数据、姿态数据和轨迹数据并对采集的数据进行计算分析并将计算分析结果上传至云服务器300,实现对土木结构安全性(例如桥梁振动,建筑物危墙倾斜等)的数字化分析和监测。
64.本实施例提供的土木工程结构安全监测及预警系统包括传感终端100、计算终端200和云服务器300。传感终端100可以采集土木工程结构的加速度数据、惯性数据和倾角数据等特征数据。计算终端200对传感终端100采集到的包括土木工程结构加速度、惯性和倾角等特征的特征数据进行计算分析得出土木工程的结构振动情况、姿态变化和运动轨迹等。计算终端200将计算分析结果上传至云服务器300以实现对土木工程结构的安全监测及预警。
65.传感终端100可以设置的传感组件有第一加速度传感组件120、第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150。参见图15,第一加速度传感组件120、第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150分别通过接口与处理模块110连接。第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150能够直接或间接地响应于第一加速度传感组件120基于采集数据的变化生成的指令进行数据采集。
66.优选地,终端100配置的惯性测量传感组件140通过接口与处理模块110连接。惯性测量传感组件140将测量到的轨迹数据通过接口传输给处理模块110。优选地,接口可以是支持spi通信协议的接口。图7是一个优选地惯性测量传感组件电路示意图。优选地,惯性测
量传感组件140可以是mems惯性测量传感器。优选地,mems惯性测量传感器采用6轴传感器bmi085。此6轴传感器集成了加速度与角速度传感器,加速度噪声低于角速度噪声低于本发明使用6轴传感器独立分析物体的运动轨迹,角速度与加速度的轴向在芯片出厂时已校准,运动轨迹分析准确度更高。如图7所示,惯性测量传感组件140的供电能够通过信号进行控制。在实际使用中,处理模块110能够依据是否需要进行惯性分析决定惯性测量传感组件140是否供电,从而降低系统功耗。优选地,处理模块110能够通过接口发送信号使惯性测量传感组件140进入休眠或断电状态。优选地,在不使用传感组件的情况下,处理模块110能够关闭惯性测量传感组件140的供电,降低系统功耗。
67.优选地,传感终端100配置的倾角传感组件150通过接口与处理模块110连接。倾角传感组件150将测量到的姿态数据通过接口传输给处理模块110。优选地,通信协议可以是spi通信协议。图17是一个优选地倾角传感组件电路示意图。优选地,倾角传感组件150可以是mems倾角传感器。优选地,mems倾角传感器采用倾角传感器scl3300-d01。测量的角度精度达到0.0055
°
,噪声低于传感器内部经过校准,比使用传统的加速度传感器计算的准确度更高。如图17所示,倾角传感组件150的供电可以通过信号控制供电。在不需要进行姿态分析的情况下处理模块110能够关闭倾角传感组件150的供电,降低系统功耗。在需要进行姿态分析的情况下,处理模块110能够开启倾角传感组件150的供电,使得终端能够传感倾角数据。处理模块110发送信号使倾角传感组件150正常供电,进而倾角传感组件150开始工作进行数据采集。倾角传感组件150将采集到的数据通过spi或其它io口发送给处理模块110,处理模块110再将这些数据通过有线或无线的通信方式传输至计算终端200进行计算分析。在不使用传感组件的情况下,处理模块110能够关闭倾角传感组件150的供电,降低系统功耗。
68.优选地,第一加速度传感组件120可以设置第一阈值和高于第一阈值的第二阈值两个阈值。优选地,第一加速度传感组件120通过中断信号使处理模块110第一状态切换至第二状态后,处理模块110通过预设程序对通过接口接收的由第一加速度传感组件120所采集的数据进行处理,同时评估确认是否启动第二加速度传感组件160。当第一加速度传感组件120采集的阈值低于第一阈值时,第一加速度传感组件120不会产生中断信号使处理模块110第一状态切换至第二状态。当第一加速度传感组件120采集的阈值高于第一阈值且低于第二阈值时,第一加速度传感组件120能够对数据进行准确采集,但需要处理模块110对采集的数据进行处理,此时处理模块110无需启动第二加速度传感组件160。当第一加速度传感组件120采集的阈值高于第二阈值时,第一加速度传感组件120不能够对数据进行准确采集,处理模块110需启动第二加速度传感组件160对数据进行采集。第一加速度传感组件120和第二加速度传感组件160组合使用能够实现较单一加速度传感组件更宽范围的数据采集,但同时使用第一加速度传感组件120和第二加速度传感组件160会产生较高功耗,通过前述分级调用加速度传感组件的方式能够在实现宽范围的数据采集的同时降低终端100的功耗。优选地,处理模块110处于第一状态时第二加速度传感组件160处于休眠状态。处理模块110处于第二状态时第二加速度传感组件160处于工作状态。处理模块110处于第一状态时通过第一加速度传感组件120采集物体运动分析所需数据。处理模块110处于第二状态时通过第二加速度传感组件160采集物体运动分析所需数据。
69.优选地,惯性测量传感组件140的工作方式可以是处理模块110响应于第一加速度传感组件120产生的中断而进入第二状态,处理模块110进入第二状态后发送信号使惯性测量传感组件140正常供电,进而惯性测量传感组件140开始工作进行数据采集并将采集的数据通过接口发送给处理模块110进行处理。优选地,处理模块110进入第二状态后发送信号使惯性测量传感组件140正常供电的同时发送信号使倾角传感组件150正常供电进行土木工程结构的倾角数据测量以便于后续计算终端200进行土木工程结构的姿态分析。
70.优选地,由于土木工程结构容易受到温度的影响(如热胀冷缩),本实施例提供的土木工程结构安全监测及预警系统的传感终端100集成了温度传感组件130以排除计算终端200在进行计算分析时温度因素带来的干扰。
71.优选地,本实施例所采用的云服务器300、计算终端200、温度传感组件130、第一加速度传感组件120、第二加速度传感组件160和处理模块110等组件及其连接的零部件与实施例1相同,在此不再赘述。
72.实施例3
73.本实施例是对实施例1和实施例2的进一步改进,重复的内容不再赘述。在本实施例中本发明提供的一种基于智能运动传感终端的通用物体运动分析系统可以是海洋灾害监测及预警系统。本实施例提供的海洋灾害监测及预警系统由传感终端100、计算终端200和云服务器300组成。本发明的通用物体运动分析系统的传感终端100拥有轨迹数据采集功能,本发明的通用物体运动分析系统能够应用在海洋灾害监测及预警领域通过采集海洋浪高数据,计算终端200基于传感终端100采集的数据计算分析1/3波高,1/10波高等数据,将超过预警值的数据上传到云服务器300,实现海洋灾害监测及预警功能。
74.在海洋灾害监测及预警领域,通常通过监测海洋浪高的方式进行灾害监测及预警。传统的监测海洋浪高的方式需要将水压传感器部署到海底,将检测设备安装在浮标上,通过测量水压传感器的压强,计算水面高度以实现海洋浪高的监测。传统方式施工周期长,且水压传感器的成本较高,不便于大规模部署。本实施例的海洋灾害监测及预警系统使用一体式运动传感终端100采集浮标的轨迹数据,通过计算终端200分析浮标移动轨迹,计算海洋波浪高度,计算终端200将计算分析结果上传至云服务器300实现海洋灾害及预警。本系统相较于传统基于水压传感器的监测预警方案成本较低,便于大规模部署。
75.海洋灾害监测及预警系统采用的传感终端100至少包括传感组件和处理模块110。优选地,传感终端100至少融合有第一加速度传感组件120和惯性测量传感组件140两种传感组件。第一加速度传感组件120和惯性测量传感组件140分别通过接口与传感终端100的处理模块110连接。处理模块110至少具有第一状态和不同于第一状态的第二状态。第一加速度传感组件120能够通过控制所述处理模块110第一状态和第二状态的切换进而控制惯性测量传感组件140的启用或休眠。
76.处理模块110的第一状态为休眠状态,第二状态为工作状态。海洋灾害监测及预警系统采用的传感终端100还设置有第一lora通信单元170。优选地,海洋灾害监测及预警系统采用的传感终端100为无线传感终端102。第一lora通信单元170通过接口与处理模块110连接。处理模块110能够通过接口向第一lora通信单元170传输数据。处理模块110还可以通过接口控制第一lora通信单元170的供电。第一加速度传感组件120能够通过控制所述处理模块110第一状态和第二状态的切换间接控制第一lora通信单元170的启用或休眠。
77.优选地,在实际部署中,初始状态下,处理模块110处于第一状态通过接口使得第一加速度传感组件120供电正常。处于第一状态的处理模块110通过接口切断惯性测量传感组件140和第一lora通信单元170的供电,使得惯性测量传感组件140和第一lora通信单元170进入休眠状态。
78.优选地,第一加速度传感组件120设置有阈值。在采集的数据超过阈值的情况下,第一加速度传感组件120产生唤醒信号并通过接口将“唤醒信号”发送至处理模块110。处理模块110响应于“唤醒信号之收到”由第一状态切换至第二状态。优选地,第一加速度传感组件120产生的唤醒信号可以是中断信号。进入第二状态的处理模块110通过接口打开惯性测量传感组件140的供电,使得惯性测量传感组件140能够进行轨迹数据的采集。优选地,惯性测量传感组件140采集的轨迹数据需经处理模块110处理后通过第一lora通信单元170发送至计算终端200进行计算分析。优选地,处于第二状态的处理模块110在需要向计算终端200发送惯性测量传感组件140采集的轨迹数据时通过接口打开第一lora通信单元170的供电,使得传感终端100能够与计算终端200进行lora通信以传输传感终端100采集的轨迹数据。优选地,在传感终端100不需要向计算终端200传输数据时,处理模块110通过接口切断第一lora通信单元170的供电,从而使得系统功耗降低,避免在无需数据传输时第一lora通信单元170带电运行产生功耗浪费。优选地,第一加速度传感组件120采集的数据仅用作控制处理模块110工作状态的触发信号,不用作为计算终端200进行计算分析的依据,无需进行传输。优选地,当第一加速度传感组件120采集的数据低于预设阈值时,第一加速度传感组件120产生休眠信号并通过接口将“休眠信号”发送至处理模块110。处理模块110响应于“休眠信号之收到”通过接口切断惯性测量传感组件140和第一lora通信单元170的供电。优选地,处理模块110响应于“休眠信号之收到”由功耗较高的第二状态进入功耗较低的第一状态。优选地,无论处理模块110处于第一状态或第二状态,第一加速度传感组件120一直保持工作。第一加速度传感组件120通过监测采集数据与阈值的关系产生唤醒信号或休眠信号进而控制处理模块110的工作状态,使得本实施例的海洋灾害监测及预警系统能够在正常运行的情况下降低功耗。
79.优选地,本实施例所采用的云服务器300、计算终端200、第一lora通信单元170、第一加速度传感组件120和处理模块110等组件及其连接的零部件与实施例1和实施例2相同,在此不再赘述。
80.实施例4
81.本实施例是对实施例1、实施例2和实施例3的进一步改进,重复的内容不再赘述。在实际使用中,本发明提供的通用物体运动分析系统的传感终端100通过集成多种传感组件可以在一块传感终端100上采集多种数据,从而使得本系统能够对振动、轨迹、姿态等物体运动进行分析。在本实施例中本发明提供的一种基于智能运动传感终端的通用物体运动分析系统可以是地质灾害监测及预警系统。在地质灾害监测及预警领域本发明的通用物体运动分析系统利用传感终端100采集岩石或泥土的轨迹数据及振动数据,通过计算终端200计算分析出岩石或泥土的振动幅度、滑动幅度等风险数据并将技术分析结果上传到云服务器300实现对泥石流、崩塌、滑坡等地质灾害的监测及预警,进而实现灾情监测的数字化升级。
82.本实施例提供的地质灾害监测及预警系统至少包括传感终端100、计算终端200和
云服务器300。传感终端100至少设置有第一加速度传感组件120和惯性测量传感组件140。传统的地质灾害监测方案为将拉线传感器插入到被检测岩石或者土壤内部,选择合适的位置拉伸传感器,将传感器采集的数据经过信号调解后进行计算分析最后上传至云平台。本实施例提供的地质灾害监测及预警系统能够通过传感终端100直接测量单点的岩石或者土壤滑动数据,然后传感终端100通过有线和无线两种方式将数据发送至计算终端200进行分析计算,计算终端200将计算分析结果上传至云服务器300实现监测及预警。
83.优选地,传感终端100可以包括处理模块110、第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150。优选地,第一加速度传感组件120能够准确检测频率为10khz以内的振动数据。各类地质灾害的振动频率能够落入第一加速度传感组件120的检测范围,因此,本实施例提供的地质灾害监测及预警系统的传感终端100为设置检测频率大于10khz的第二加速度传感组件160。
84.优选地,第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150分别通过接口与处理模块110连接。处理模块110能够通过接口控制第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150的供电。第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150能够通过接口将采集的数据传输至处理模块110。优选地,进行数据传输的接口为支持通信协议的接口。优选地,控制供电的接口可以是普通i/o口。处理模块110至少具有第一状态和不同于第一状态的第二状态。第一加速度传感组件120能够通过控制所述处理模块110第一状态和第二状态的切换进而控制惯性测量传感组件140和倾角传感组件150的启用或休眠。优选地,在本实施例提供的地质灾害监测及预警系统采用的传感终端100为无线传感终端102时,第一加速度传感组件120能够通过控制所述处理模块110第一状态和第二状态的切换间接控制第一lora通信单元170的启用或休眠。
85.优选地,处理模块110的第一状态为休眠状态,第二状态为工作状态。优选地,惯性测量传感组件140和倾角传感组件150可以共用一个电源控制接口。优选地,传感终端100在实际部署中,初始状态为处理模块110处于第一状态,切断惯性测量传感组件140和倾角传感组件150的供电使之休眠,第一加速度传感组件120处于正常工作状态实时采集物体运动的振动数据。
86.优选地,当第一加速度传感组件120采集的振动数据低于预设阈值时,第一加速度传感组件120保持对物体运动的振动数据的实时采集不进行其他操作,传感终端100的各个组件保持初始状态。当第一加速度传感组件120采集的振动数据由低于预设阈值变化为高于预设阈值时,第一加速度传感组件120产生唤醒中断信号通过接口将“唤醒中断信号”发送至处理模块110。处理模块110响应于“唤醒中断信号之收到”由第一状态切换至第二状态。优选地,进入第二状态的处理模块110通过惯性测量传感组件140和倾角传感组件150共用的供电控制接口打开惯性测量传感组件140和倾角传感组件150的供电,使得惯性测量传感组件140能够采集物体运动的轨迹数据,倾角传感组件150能够采集物体运动的姿态数据。优选地,处理模块110进入第二状态后接收第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150采集的数据。优选地,处于第二状态的处理模块110将各传感组件采集的数据融合后传输至计算终端200进行计算分析。优选地,地质灾害监测及预警系统对实时性要求较高。本实施例的传感终端100在向计算终端200传输数据时优选有线传输方式且利用的是高速通信端口221进行数据传输。在不便进行布线操作的使用环境中(如悬崖等),
本实施例使用的地质灾害监测及预警系统采用无线传感终端102进行数据采集。优选地,无线传感终端102利用配置的第一lora通信单元170进行无线通信。优选地,第一lora通信单元170通过接口与处理模块110连接。处理模块110能够通过接口向第一lora通信单元170传输数据。处理模块110还可以通过接口控制第一lora通信单元170的供电。第一加速度传感组件120能够通过控制所述处理模块110第一状态和第二状态的切换间接控制第一lora通信单元170的启用或休眠。优选地,处理模块110处于第一状态时通过接口切断第一lora通信单元170的供电使之休眠。当处理模块110处于第二状态的情况下,处理模块110仅在将各传感组件采集的数据融合后需要传输至计算终端200时打开第一lora通信单元170的供电使之进行数据传输。优选地,在传感终端100不需要向计算终端200传输数据时,处理模块110通过接口切断第一lora通信单元170的供电,从而使得系统功耗降低,避免在无需数据传输时第一lora通信单元170带电运行产生功耗浪费。当第一加速度传感组件120采集的振动数据由高于预设阈值变化为低于于预设阈值时,第一加速度传感组件120产生休眠中断信号通过接口将“休眠中断信号”发送至处理模块110。优选地,处理模块110响应于“休眠信号之收到”由功耗较高的第二状态进入功耗较低的第一状态。处理模块110响应于“休眠信号之收到”通过接口切断惯性测量传感组件140和倾角传感组件150的供电使之进入休眠状态。第一加速度传感组件120通过监测采集数据与阈值的关系产生唤醒信号或休眠信号进而控制处理模块110的工作状态,使得本实施例的地质灾害监测及预警系统能够在正常运行的情况下降低功耗。
87.优选地,本实施例的传感终端100将第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150按照彼此轴向平齐使得采集到的数据对齐的方式设置于同一板体,便于处理模块110对第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150采集的数据进行处理。具体地,参见图18,第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150按照轴向对齐的方式设置在同一板体上。优选地,第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150通过轴对齐的方式设置在同一板体后,第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150在进行数据采集时至少有一个基准参数是相同的,便于终端100的处理模块110以及计算终端200对来自不同传感组件的数据进行融合处理。优选地,第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150的核心器件都包括加速度计。本实施例的传感终端100可以将多个以加速度计为核心器件的传感组件按照轴对齐的方式设置在同一电路结构的板体上,使得众传感组件的至少一个参数(例如位置高度、相对坐标等)相同,从而能够减少传感终端100的处理模块110和计算终端200在对众传感组件所采集数据进行融合处理时所需要处理的参数数量,实现快速处理,间接地减少了本实施例的地质灾害监测及预警系统在进行物体运动分析时所花费的时间。优选地,第一加速度传感组件120、惯性测量传感组件140和倾角传感组件150设置在板体上远离周围机械安装孔的位置,从而避免外部的应力传递到传感器上。本实施例的传感终端100将各传感组件居中靠内放置在电路板上,避免因对传感终端100进行封装使电路板产生的应力传递到电路板上放置的传感组件导致传感组件的采集数据结果不准确。
88.优选地,本实施例所采用的云服务器300、计算终端200、第一lora通信单元170、第一加速度传感组件120、惯性测量传感组件140、倾角传感组件150和处理模块110等组件及
其连接的零部件与实施例1、实施例2和实施例3相同,在此不再赘述。
89.实施例5
90.本实施例是对实施例1、实施例2、实施例3和实施例4的进一步改进,重复的内容不再赘述。在本实施例中本发明提供的一种基于智能运动传感终端的通用物体运动分析系统可以是输电线工程安全监测及预警系统。在输电线工程安全监测及预警领域本发明的通用物体运动分析系统能够利用传感终端100采集振动数据、姿态数据、轨迹数据,通过计算终端200计算分析电力铁塔倾斜、电力线椭圆舞动,检测电力铁塔,电力线舞动的危险情况并通过计算终端200将计算分析结果上传至云服务器300对相应危险情况进行处理,从而实现输电线路工程安全监测的数字化升级。
91.在输电线工程安全监测及预警领域,传统的技术方案使用加速度传感器测量位移数据,但加速度传感器难以测量空间中运动的轨迹,导致测量误差较大,使用视频同心圆监测方法测量轨迹,设备功耗较高,施工安装不方便。本实施例提供的输电线工程安全监测及预警系统基于能够同时采集振动数据、姿态数据和轨迹数据的传感终端100对电力线舞动轨迹,电力铁塔倾斜等情况进行分析,并将分析结果上传至云服务器300实现安全监测及预警。
92.本实施例提供的输电线工程安全监测及预警系统包括传感终端100、计算终端200和云服务器300。传感终端100可以设置的传感组件有第一加速度传感组件120、第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150。
93.优选地,传感终端100可以包括处理模块110、第一加速度传感组件120和第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150中的一种或几种传感组件的组合。第一加速度传感组件120、第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150分别通过接口与处理模块110连接。第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150能够直接或间接地响应于第一加速度传感组件120基于采集数据的变化生成的指令进行数据采集。
94.优选地,处理模块110至少具有第一状态和不同于第一状态的第二状态。第一加速度传感组件120能够通过控制所述处理模块110第一状态和第二状态的切换进而控制第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150的启用或休眠。处理模块110的第一状态为休眠状态,第二状态为工作状态。
95.优选地,在实际部署中,初始状态下,处理模块110处于第一状态;第一加速度传感组件120处于供电正常的工作状态;第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150处于断电的休眠状态。
96.当第一加速度传感组件120采集的数据超过预设阈值时,第一加速度传感组件120产生中断信号并通过接口将“中断信号”发送至处理模块110。处理模块110响应于“中断信号之收到”由第一状态切换至第二状态。进入第二状态的处理模块110根据使用需求通过接口打开第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150的供电,使得第二加速度传感组件160和/或惯性测量传感组件140和/或倾角传感组件150进行数据采集,处理模块110将各传感组件采集到的数据传输至计算终端200进行计算分析。
97.优选地,在对电力线舞动轨迹进行监测和预警时,本实施例的传感终端100可以集成有第一加速度传感组件120、第二加速度传感组件160和惯性测量传感组件140。优选地,
第二加速度传感组件160能够采集的振动数据的频率高于第一加速度传感组件120。第一加速度传感组件120设置有第一阈值和高于第二阈值。当第一加速度传感组件120采集的阈值低于第一阈值时,第一加速度传感组件120不会产生中断信号使处理模块110第一状态切换至第二状态。第一加速度传感组件120保持数据采集不进行其他操作。当第一加速度传感组件120采集的阈值高于第一阈值且低于第二阈值时,第一加速度传感组件120保持对数据的采集同时产生中断信号使得处理模块110响应于“中断信号之收到”由第一状态切换至第二状态,此时第一加速度传感组件120能够对振动数据进行准确采集,处理模块110仅需打开惯性测量传感组件140的供电,使得惯性测量传感组件140采集轨迹数据。处理模块110对第一加速度传感组件120和惯性测量传感组件140采集的数据进行处理后传输至计算终端200进行计算分析,此时处理模块110无需启动第二加速度传感组件160。当第一加速度传感组件120采集的阈值高于第二阈值时,第一加速度传感组件120不能够对数据进行准确采集,处理模块110在启动惯性测量传感组件140采集轨迹数据的同时还需启动第二加速度传感组件160对数据进行采集。
98.优选地,本实施例的传感终端100将第一加速度传感组件120和第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150中的一种或几种传感组件按照彼此轴向平齐使得采集到的数据对齐的方式设置于同一板体,便于处理模块110对第一加速度传感组件120和第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150中的一种或几种传感组件采集的数据进行处理。具体地,第一加速度传感组件120和第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150中的一种或几种传感组件按照轴向对齐的方式设置在同一板体上。优选地,第一加速度传感组件120和第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150中的一种或几种传感组件通过轴对齐的方式设置在同一板体后,第一加速度传感组件120和第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150中的一种或几种传感组件在进行数据采集时至少有一个基准参数是相同的,便于终端100的处理模块110以及计算终端200对来自不同传感组件的数据进行融合处理。优选地,第一加速度传感组件120、第二加速度传感组件160、惯性测量传感组件140和倾角传感组件150的核心器件都包括加速度计。本实施例的传感终端100可以将多个以加速度计为核心器件的传感组件按照轴对齐的方式设置在同一电路结构的板体上,使得众传感组件的至少一个参数(例如位置高度、相对坐标等)相同,从而能够通过减少传感终端100的处理模块110和计算终端200在对众传感组件所采集数据进行融合处理时所需要处理的参数数量,实现快速处理,从而减少了本实施例的输电线工程安全监测及预警系统在进行物体运动分析时所花费的时间。优选地,传感终端100中各传感组件设置在电路板板体上远离机械安装孔的位置,从而避免外部的应力传递到传感器上导致传感组件的采集数据结果不准确。
99.优选地,本实施例所采用的云服务器300、计算终端200、第一lora通信单元170、第一加速度传感组件120、惯性测量传感组件140、倾角传感组件150和处理模块110等组件及其连接的零部件与实施例1、实施例2、实施例3和实施例4相同,在此不再赘述。
100.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非
构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。在全文中,“优选地”所引导的特征仅为一种可选方式,不应理解为必须设置,故此申请人保留随时放弃或删除相关优选特征之权利。本发明说明书包含多项发明构思,诸如“优选地”、“根据一个优选实施方式”或“可选地”均表示相应段落公开了一个独立的构思,申请人保留根据每项发明构思提出分案申请的权利。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1