辅助驾驶盲区检测的方法、装置、计算机设备及存储介质与流程
1.本技术涉及辅助驾驶技术领域,尤其是涉及一种盲区检测联动辅助驾驶。
背景技术:
2.目前在汽车辅助驾驶中,盲点、盲区的探测是一种主流的车载安全类高科技配置,其解决了许多汽车因现有汽车必然存在的盲区问题所带来的,而现实中的车辆行驶道路情况是比较复杂的,并且行驶道路也以城市化的标准被划分为城市道路和乡镇道路。
3.其中在乡镇道路中,绝大多数的红绿灯路口是没有设置有人行道这类行人等待区域的,所以车辆行驶道路的情况会相对来说更加附加,加上绝大部分乡镇道路的路宽是相对比较窄的,这在无形中增加了车辆行驶的危险性。尤其是在许多十字路口等设置有红绿灯的路口,当有行人在一侧进行等候红绿灯,并且行人的交通意识浅薄在乡镇道路上违反交通规则横穿马路,造成了许多因车辆盲区导致与行人发生碰撞摩擦的交通事故。在现有大多数的汽车盲区探测中,绝大部分适用于城市道路,因为其系统的设定中识别盲区大多数目标较大的车辆之间车道变化的情况探测,对于与车辆初始距离比较近的行人物体其反应的措施也单纯通过警报声来对驾驶人进行提醒。
4.针对上述中的相关技术,发明人认为在乡镇道路中,现有的盲区检测警报因道路窄小的情况下,警报声的提示容易让驾驶人产生麻木感而不引起注意,无法使辅助驾驶人对车辆盲区的警惕作用。
技术实现要素:
5.本技术的目的是提供一种辅助驾驶盲区检测的方法、装置、计算机设备及存储介质,以改进现有的盲区检测警报因道路窄小的情况下,警报声的提示容易让驾驶人产生麻木感而不引起注意的问题。
6.本技术提供的一种辅助驾驶盲区检测方法,包括:获取车辆所处道路的基本信息,分析道路定位,获取道路宽度信息;基于道路宽度信息,根据预设对应调节机制,调节车载侧方摄像头角度,获取盲区的图像和红绿灯图像;基于盲区的图像,进行人特征识别,获取得到车辆盲区的行人等待区域;基于红绿灯的图像,进行图像rgb颜色判断,发送红绿灯变化信号;基于车辆盲区的行人等待区域与传感器测距,获取与行人之间的距离,发送盲区图像与行人距离数据至外部显示屏进行提示。
7.通过采用上述技术方案,能够根据道路宽度信息,适当调节车载摄像头的监控角度,将监控重点放在盲区的行人区域,并且通过红绿灯的变化,传感器与人之间的距离结合盲区的图像,将图像信息中呈现出具体的数值,并且呈现于车载显示屏上进行提醒驾驶人车辆与盲区行人之间的距离以及图像,与现有的单纯通过报警鸣声提醒,多了更加直观的图像提醒和距离数值提醒,让驾驶人更好地获取盲区的危险信息,提升驾驶的安全性。
8.优选的,所述获取车辆所处道路的基本情况信息,分析道路定位,获取道路宽度信息的步骤包括:获取卫星定位中车辆所处道路的基础信息和车辆所处道路的位置信息;启动测距传感器,获取实时的道路宽度信息,对道路进行边缘构建模型,回传至外部显示屏。
9.通过采用上述技术方案,先定位出车辆所在的道路,分析道路为省级、市级道路,评判道路的复杂情况,提示驾驶人路况存在的情况,同时启动传感器对道路宽度信息进行构建模型呈现在车载显示屏上,让司机更能注意车辆相对路面的位置,规范好驾驶行为,提升环境警惕性。
10.优选的,所述基于道路宽度信息,根据预设对应调节机制,调节车载侧方摄像头角度,获取盲区的图像和红绿灯图像的步骤包括:基于道路宽度信息,读取预设道路宽度与摄像头调节角度对应表,调节车载侧方摄像头角度;获取盲区的图像,再根据车载前方摄像头,通过图像特征识别获取到红绿灯图像。
11.通过采用上述技术方案,能够根据道路宽度调节响应的摄像头角度,更好地采集车辆盲区以及道路的侧方情况,并同时获取到红绿灯图像,对后续盲区的动态以及红绿灯的动态之间的反应结合提供辅助基础。
12.优选的,所述基于盲区的图像,进行人特征识别,获取得到车辆盲区的行人的步骤包括:基于盲区的图像,对盲区图像根据像素块进行预设的图像切割,获取得到车辆盲区图像的局部像素块;基于盲区图像的局部像素块,进行人脸特征识别判断,获取到盲区图像中的行人集中区域。
13.通过采用上述技术方案,对盲区图像进行图像切割,将其分为局部像素块,这类局部像素块能够更加快速地进行人脸特征识别,减少噪点,识别出带有人脸特征的像素块后,分析人脸集中的区域,将此像素块垂直图像领域标为行人集中区域,提高了精准性以及人脸分析的效率,减少了时间成本。
14.优选的,所述基于红绿灯的图像,进行图像rgb颜色判断,发送红绿灯变化信号的步骤包括:基于红绿灯图像,获取红绿灯的图像rgb颜色值,根据预设的rgb颜色范围值进行对比,监控当前红绿灯显示颜色;基于当前红绿灯显示颜色,当显示颜色为绿色时,则发送红绿灯变化信号,开启警戒模式。
15.通过采用上述技术方案,按照预设的图像rgb范围值来规定好红色、绿色、黄色的范围值,当检测到红绿灯显示为绿灯时,则会向发送警戒信号至车载显示屏,让驾驶人注意盲区的变化,提高驾驶警惕性。
16.优选的,所述基于车辆盲区的行人等待区域与传感器测距,获取与行人之间的距离,发送盲区图像与行人距离数据至外部显示屏进行提示的步骤包括:基于车辆盲区的行人等待区域,启动传感器对相对应的等待区域进行测距,获取
具体的距离数值;基于盲区图像和等待区域的距离数值,对图像数据和等待区域的距离数值进行整合处理,发送图像信息至外部显示屏。
17.通过当前技术方案,能够结合具体距离数据呈现在显示屏上,能够更加直观地看出车辆和等待区域中行人的距离,并且对距离数值和图像数据进行整合,将距离数值呈现在盲区图像上,让车辆能注意在路口等待期间与行人的距离,提高驾驶安全性。
18.优选的,所述基于盲区图像和等待区域的距离数值,对图像数据和等待区域的距离数值进行整合处理,发送图像信息至外部显示屏的步骤之后包括:基于距离数值,当距离数值达到预设警戒距离数值,则发送车辆前置灯闪烁信号。
19.通过采用上述技术方案,当车辆因绿灯指示前行后,能够与行人之间的距离进行警戒,并且通过前置灯闪烁信号来提醒行人小心车辆,这不仅仅提醒驾驶人盲区情况,同时也通过前置灯闪烁而提醒行人,具有双重保护的效果,提升了驾驶安全性和行人对路况的注意力。
20.第二方面,本技术提供的一种辅助驾驶盲区检测装置,采用如下的技术方案:获取道路信息模块,用于获取车辆所处道路的基本信息,分析道路定位,获取道路宽度信息;获取图像模块,用于基于道路宽度信息,根据预设对应调节机制,调节车载侧方摄像头角度,获取盲区的图像和红绿灯图像;获取行人等待区域模块,用于基于盲区的图像,进行人特征识别,获取得到车辆盲区的行人等待区域;获取红绿灯变化模块,用于基于红绿灯的图像,进行图像rgb颜色判断,发送红绿灯变化信号;显示提示模块,用于基于车辆盲区的行人等待区域与传感器测距,获取与行人之间的距离,发送盲区图像与行人距离数据至外部显示屏进行提示。
21.通过采用上述技术方案,能够根据道路宽度信息,适当调节车载摄像头的监控角度,将监控重点放在盲区的行人区域,并且通过红绿灯的变化,传感器与人之间的距离结合盲区的图像,将图像信息中呈现出具体的数值,并且呈现于车载显示屏上进行提醒驾驶人车辆与盲区行人之间的距离以及图像,与现有的单纯通过报警鸣声提醒,多了更加直观的图像提醒和距离数值提醒,让驾驶人更好地获取盲区的危险信息,提升驾驶的安全性。
22.综上所述,本技术包括以下至少一种有益技术效果:1.本案中通过根据道路宽度信息,适当调节车载摄像头的监控角度,将监控重点放在盲区的行人区域,并且通过红绿灯的变化,传感器与人之间的距离结合盲区的图像,将图像信息中呈现出具体的数值,并且呈现于车载显示屏上进行提醒驾驶人车辆与盲区行人之间的距离以及图像,与现有的单纯通过报警鸣声提醒,多了更加直观的图像提醒和距离数值提醒,让驾驶人更好地获取盲区的危险信息,提升驾驶的安全性;2.本案中通过结合具体距离数据呈现在显示屏上,能够更加直观地看出车辆和等待区域中行人的距离,并且对距离数值和图像数据进行整合,将距离数值呈现在盲区图像上,让车辆能注意在路口等待期间与行人的距离,提高驾驶安全性;3.本案中通过当车辆因绿灯指示前行后,能够与行人之间的距离进行警戒,并且
通过前置灯闪烁信号来提醒行人小心车辆,这不仅仅提醒驾驶人盲区情况,同时也通过前置灯闪烁而提醒行人,具有双重保护的效果,提升了驾驶安全性和行人对路况的注意力。
附图说明
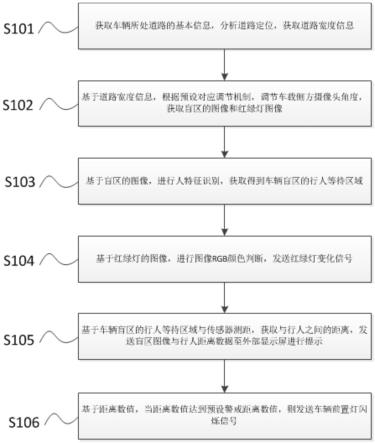
23.图1是本技术辅助驾驶盲区检测的方法实施例1的工作流程图;图2是本技术辅助驾驶盲区检测的方法实施例1的具体工作流程图;
具体实施方式
以下结合附图1-附图2,对本技术作进一步详细说明。
24.实施例1:一种辅助驾驶盲区检测的方法,参照图1,包括:s101.获取车辆所处道路的基本信息,分析道路定位,获取道路宽度信息;通过定位系统获取当前车辆所在道路的基本信息情况,不限于道路级别,道路事故路段,道路全长以及道路复杂级别,并且分析道路所处的位置,再通过机动车上的传感器设备测算出道路的宽度信息。
25.s102.基于道路宽度信息,根据预设对应调节机制,调节车载侧方摄像头角度,获取盲区的图像和红绿灯图像;根据传感器设备测算出的道路宽度信息,再去读取预设的摄像头角度调节表,获取得到车载侧方摄像头的调节角度信息,将调节角度发送至主控器,操控摄像头进行调节角度,获取得到盲区的图像,并且让车载前置摄像头获取红绿灯图像。
26.s103.基于盲区的图像,进行人特征识别,获取得到车辆盲区的行人等待区域;根据车载侧方摄像头获取得到的盲区图像,对盲区图像中进行人脸特征识别,通过识别出人脸聚集的地方,则将此人脸以及垂直以下的区域定位行人等待区域。
27.s104.基于红绿灯的图像,进行图像rgb颜色判断,发送红绿灯变化信号;根据车载前置摄像头获取到的红绿灯图像,则对红绿灯图像中对红绿灯特征进行识别获取,通过图像中的颜色显示的rgb颜色变化,判断当rgb颜色为绿色时,则发送变化信号。
28.s105.基于车辆盲区的行人等待区域与传感器测距,获取与行人之间的距离,发送盲区图像与行人距离数据至外部显示屏进行提示。
29.根据车辆侧方摄像头获取到的行人等待区域,再通过测距传感器向行人等待区域进行距离的获取,将车辆离行人等待区域的距离数值呈现在车载显示屏图像中,与车载显示屏图像中显示的盲区图像进行结合提示。
30.s106.基于距离数值,当距离数值达到预设警戒距离数值,则发送车辆前置灯闪烁信号根据车载显示屏图像中的车辆离行人等待区域的距离数值,当距离数值达到预设的警戒距离数值的话,则不仅发送车内提示声,还会发送车辆前置等闪烁信号进行车辆前置灯的闪烁操作。
31.参照图2,s1011.获取卫星定位中车辆所处道路的基础信息和车辆所处道路的位置信息,通过车载卫星定位系统,定位出车辆所处的具体位置,通过车辆所处的具体位置,
获取到道路的道路等级、道路拥堵情况等基础信息。
32.s1012.启动测距传感器,获取实时的道路宽度信息,对道路进行边缘构建模型,回传至外部显示屏,启动车载的测距传感器,通过传感器获取到当前车辆所处的道路宽度的信息,并且根据侧方摄像头对道路进行图像的简单构建,并回传至车载显示屏中。
33.s1021.基于道路宽度信息,读取预设道路宽度与摄像头调节角度对应表,调节车载侧方摄像头角度,将测距传感器获取到的当前车辆所处的道路宽度的信息进行与预设道路宽度与摄像头调节角度对应表进行匹配对比,获取得到摄像头调节角度,根据摄像头调节角度信息来对车载侧方摄像头的角度进行调整。
34.s1022.获取盲区的图像,再根据车载前方摄像头,通过图像特征识别获取到红绿灯图像,在车载侧方摄像头进行角度的调整后,通过摄像头获取此时的图像,此时图像为盲区图像,在通过车载前方的摄像头,根据图像识别,利用红绿灯特征模板进行识别出红绿灯的位置,并采集记录当前红绿灯的图像。
35.s1031.基于盲区的图像,对盲区图像根据像素块进行预设的图像切割,获取得到车辆盲区图像的局部像素块,根据车载侧方摄像头获取到的盲区图像,对盲区图像进行图像切割,切割单元为预设的像素块大小,例如:2x2,3x3........切割出能够与图像等比例的小像素块,获取得到车辆盲区图像的局部像素块。
36.s1032.基于盲区图像的局部像素块,进行人脸特征识别判断,获取到盲区图像中的行人集中区域,根据获取到的车辆盲区图像的局部像素块,对每个小像素块与人脸特征进行对比识别,例如:眼睛、鼻子、嘴巴等人体特征,识别出人脸,并且通过在图像中进行标识出来,在标识较为集中的区域则判定为行人集中区域。
37.s1041.基于红绿灯图像,获取红绿灯的图像rgb颜色值,根据预设的rgb颜色范围值进行对比,监控当前红绿灯显示颜色,根据车载前置摄像头所获取的红绿灯图像,来分析红绿灯图像此时的rgb值,通过获取图像此时红绿灯颜色的rgb值,并且与预设的红、绿、黄的rgb值范围进行对比当前的红绿灯颜色。
38.s1043.基于当前红绿灯显示颜色,当显示颜色为绿色时,则发送红绿灯变化信号,开启警戒模式,在比对当前红绿灯颜色值若是落入为绿色的rgb范围值时,则会发送红绿灯变化信号至车载屏幕图像中,开启警戒模式,使得传感器当检测到车身周围有物体、人体时则会有提示声。
39.s1051.基于车辆盲区的行人等待区域,启动传感器对相对应的等待区域进行测距,获取具体的距离数值,根据获取到的车辆盲区中的行人等待区域,则启动传感器对行人等待区域进行测距,获取到与等待区域中物体、人体的距离。
40.s1052.基于盲区图像和等待区域的距离数值,对图像数据和等待区域的距离数值进行整合处理,发送图像信息至外部显示屏,根据测距传感器获取到的等待区域中的物体、人体的距离以及盲区中行人等待区域的图像,将两方面的数据建立联系,并在车载显示屏中呈现出来。
41.本技术实施例的实施原理为:能够根据道路宽度信息,适当调节车载摄像头的监控角度,将监控重点放在盲区的行人区域,并且通过红绿灯的变化,传感器与人之间的距离结合盲区的图像,将图像信息中呈现出具体的数值,并且呈现于车载显示屏上进行提醒驾驶人车辆与盲区行人之间的距离以及图像,与现有的单纯通过报警鸣声提醒,多了更加直观的图像提醒和距离数值提醒,让驾驶人更好地获取盲区的危险信息,而当车辆因绿灯指示前行后,能够与行人之间的距离进行警戒,并且通过前置灯闪烁信号来提醒行人小心车辆,这不仅仅提醒驾驶人盲区情况,同时也通过前置灯闪烁而提醒行人,具有双重保护的效果,提升了驾驶安全性和行人对路况的注意力。
42.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,其中相同的零部件用相同的附图标记表示。故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1