一种用于治超非现场执法系统的车辆分离装置及方法与流程
1.本发明属于公路交通技术领域,涉及一种用于治超非现场执法系统的车辆分离装置及方法。
背景技术:
2.治超非现场执法系统作为货运车辆是否超限超载的检测系统,检测数据需要作为执法依据,因此称重数据、车牌识别数据等数据匹配的准确率至关重要,而影响数据准确率的最基本条件就是车辆分离的可靠性,因为车辆分离信号是称重系统和车牌识别系统工作的触发信号。由于治超非现场执法系统一般设置在国省道主要干线,一般为多车道无人值守系统,传统的光栅分离器无法安装设置,目前应用最多的是线圈信号分车,但是由于线圈使用寿命短、更换不方便,而且检测准确率受车辆底盘的高低、通行速度影响比较大,6轴挂车低速通过时检测信号时有中断,这样1辆车通过时就会出现2~3条数据,车牌识别相机抓拍图片也会抓拍2~3次,这样数据匹配就会完全错位,影响系统运行。
技术实现要素:
3.本发明为了解决治超非现场执法系统车辆分离的可靠性、数据匹配准确率,提供一种用于治超非现场执法系统的车辆分离装置及方法,拟采取线圈车辆分离和激光车辆分离相结合的方式实现,解决车辆分离单独采用环形地感线圈方式和激光车辆分离方式的缺点,激光分车器集成恶劣天气传感器,识别恶劣天气状况,输出检测信号,称重控制器通过检测激光分车器的检测信号,识别采取何种车辆分离方式。从而提高治超非现场执法系统车辆分离的可靠性、数据匹配准确率。
4.为实现上述发明目的,本发明采用的技术方案如下:一种用于治超非现场执法系统的车辆分离装置,包括称重主体、环形地感线圈、8通道车辆检测器、激光分车器、称重控制器、摄像机、匹配处理机;其特征是,
5.在称重主体前后端的车道上分别布设2组环形地感线圈,前端为触发线圈,后端为收尾线圈;环形地感线圈接入8通道车辆检测器,输出信号采用can总线接口与称重控制器can总线接口连接;激光分车器设置在称重主体正上方的杆件上,每个车道设置一个激光分车器,激光分车器的检测信号和输出信号同时接入称重控制器di输入接口;摄像机和称重控制器通过485总线连接,称重控制器接收can总线协议和di输入信号,判断哪个车道目前有车辆通过触发线圈还是收尾线圈,及时启动称重流程,完成称重的同时,发送对应车道的抓拍信号,对应车道的摄像机就会对车辆进行抓拍识别车牌,这样每通过一辆车就有对应的称重数据和车牌号;称重控制器和摄像机通过网口与匹配处理机连接,匹配处理机根据称重数据和抓拍的车牌号的时序逻辑进行数据匹配,将称重数据和抓拍的车牌号实现准确匹配。
6.进一步地,系统正常工作时8通道车辆检测器输出信号和激光分车器的输出信号同时接入称重控制器,当称重控制器检测到激光分车器的检测信号为高电平时,使用激光
分车器分车;当检测到激光分车器的检测信号为低电平时,使用环形地感线圈分车;当激光分车器的检测信号恢复到高电平时,称重控制器又重新切换到激光分车器分车模式,通过称重控制器检测输入信号的逻辑关系进行分车模式的自动切换。
7.进一步地,如果采用激光分车器分车,激光分车器对通过布防区域的车辆进行检测,有车辆遮挡布防区域时,激光分车器输出高电平,没有车辆遮挡布防区域时,激光分车器输出低电平,称重控制器检测激光分车器输出信号的电平状态,通过高低电平状态实现车辆的分离。
8.进一步地,如果采用环形地感线圈分车,车辆通过环形地感线圈上方时8通道车辆检测器输出高电平,车辆离开环形地感线圈上方时输出低电平,通过高低电平状态实现车辆的分离。
9.进一步地,每个车道的环形地感线圈分两组,每组4个接入8通道车辆检测器的线圈输入通道,每个车道都会对应1个车道号地址,接入8通道车辆检测器前4个通道对应1车道、接入后4个通道对应2车道,每组环形地感线圈在8通道车辆检测器中前两个位置对应触发线圈,后两个位置对应收尾线圈。
10.进一步地,每一路称重控制器di信号对应1个车道号,从而启动对应车道的称重流程和数据匹配流程。
11.进一步地,激光分车器内置环境检测模块,与激光分车器通过rs485总线在内部连接,环境检测模块通过rs485接口发送对应的协议帧,识别为天气正常时激光分车器处理器输出对应的高电平,识别为恶劣天气时激光分车器处理器输出对应的低电平,恶劣天气包括浓雾、暴雨可能影响激光分车器正常工作的天气状况。
12.本发明具有以下优点:
13.本发明提出采用环形线圈车辆分离和激光车辆分离相结合的方式实现车辆分离,正常天气情况下,激光分车器的可靠性远高于线圈车辆分离的可靠性,但是激光分车器的缺点是遇到浓雾、暴雨等天气,分车功能会失效,因此本发明提出采用环形线圈车辆分离和激光车辆分离相结合的方式实现车辆分离,正常天气状况下采用激光车辆分离,恶劣天气采用环形地感线圈分离,这样会提高车辆分离的可靠性和数据匹配的准确率。
14.本发明适用于多车道高速车辆分离场景,能有效解决线圈车辆分离的缺点和激光分车器各自的缺点,优势互补,从而提高车辆分离的准确率,线圈车辆分离和激光车辆分离自动进行切换,无需人工进行干预,从而实现两种模式的无缝切换。
附图说明
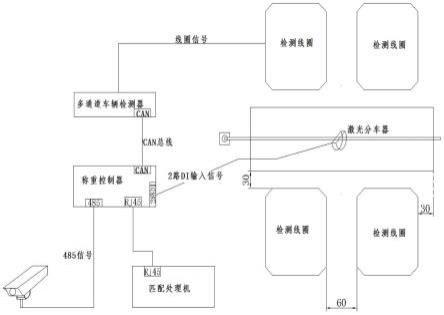
15.图1是本发明的布设及原理框图。
16.图2是本发明的激光分车器原理框图。
具体实施方式
17.如图1所示,一种用于治超非现场执法系统的车辆分离装置,具有车辆分离准确率高,模式自适应等特点,以单车道为例,本发明包含2组环形地感线圈、每组包括2个线圈,1台激光分车器,沿行车方向前2个线圈为触发线圈,后2个线圈为收尾线圈,线圈接入8通道车辆检测器,每个车道的线圈接入对应8通道车辆检测器的对应通道会对应1个车道号和1
种线圈类型,多通道车检器检测器通过can总线接入称重控制器,称重控制器接收can总线协议,判断那个车道目前有车辆通过触发线圈还是收尾线圈,及时启动称重流程,同时称重控制器通过485总线触发抓拍摄像机抓拍照片并识别车牌,后端匹配处理主机根据匹配软件将称重数据和抓拍数据实现准确匹配。
18.激光分车器安装在称重平台上方6米高的杆件上,通过布防检测区域实现对通过布防区域的车辆进行检测。有车辆遮挡布防区域时,激光分车器输出高电平,没有车辆遮挡布防区域时,激光分车器输出低电平,通过高低电平状态实现车辆的分离。
19.激光分车器的输出信号和检测信号同时接入称重控制器的di输入接口,di输入的通道对应相应的车道号,方便后续数据匹配,称重控制器检测di输入电平的高低,判断采取何种分车模式,激光分车器和环形车辆检测器独立使用或者配合使用,采取何种使用模式,主要取决于激光分车车器的检测信号。
20.每个车道的环形地感线圈分两组(4个)接入8通道车辆检测器的线圈输入通道,每个车道都会对应1个车道号地址,接入8通道车辆检测器前4个通道对应1车道、接入后4个通道对应2车道,每组环形地感线圈在8通道车辆检测器中前两个位置对应触发线圈和后两个位置对应收尾线圈。
21.例如:系统中有4个车道,合计16个线圈,分别接入2个8通道车辆检测器,协议中会定义接入第1个多通道车检器的线圈为1车道和2车道,接入第2个多通道车检器的线圈为3车道和4车道,1车道线圈接入第1个多通道车检器前4个通道,2车道线圈接入第1个多通道车检器后4个通道,哪个通道线圈信号发生变化从而区分出是哪一个车道;依次类推,并且定义在多通道车检器中1组线圈中前两个为触发线圈,后两个为收尾线圈,这些信息都是通过can总线接口接入称重控制器。
22.车辆通过线圈上方时8通道车辆检测器输出有车信号,车辆离开线圈上方时输出无车信号,通过高低电平状态实现车辆的分离。
23.模式循环切换方式如下
24.激光分车器检测信号线圈分车激光分车1
×
√0√
×1×
√
25.注:√表示启用,
×
表示不启用。
26.激光分车器内置环境检测传感模块,与激光分车器通过rs485总线在内部连接,当环境检测模块检测到恶劣天气状况时,环境检测传感模块通过rs485接口发送对应的协议帧,激光分车器处理器输出对应的高电平或者低电平。
27.激光分车器的检测信号主要识别恶劣天气,天气正常时为高电平,识别为恶劣天气时为低电平,恶劣天气包括浓雾、暴雨可能影响激光分车器正常工作的天气状况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1