水面机器人的禁区避让方法及避让系统与流程
1.本发明涉及的水面机器人技术领域,尤其涉及一种水面机器人的禁区避让方法及避让系统。
背景技术:
2.随着科技的发展,机器人不仅仅应用于地面,也可以应用于水面,水面机器人在水面上航行,并且将采样试管移动至对应的采样点,此时,水面机器人偶尔需要在野外环境进行水样采集,野外环境中的水面会漂浮着障碍物,并且水面机器人按照预设的航行路线进行航行,其中,水面机器人对转弯处和障碍物处均需要进行拐弯,并且水面机器人的拐弯路线仅仅通过单一标记进行触发,导致水面机器人在航行路线的安全性较低。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,本发明提供了一种水面机器人的禁区避让方法及避让系统,基于航行路线遍历水面的障碍物,并且对航行路线进行障碍物标记,以便于在航行路线上预先做好障碍物标记,基于障碍物标记触发水面机器人的禁区设置,以形成水面机器人的禁区,此时,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行,另外,遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线,从而根据水面机器人的拐点标记和碍物标记对水面机器人在非安全区域进行安全操作,并且细化水面机器人在处于危险状态下动作调控,从而保证了水面机器人在非安全区域的安全路线,提高了水面机器人在航行路线的安全性。
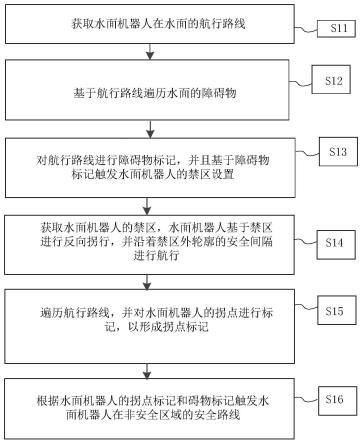
4.为了解决上述技术问题,本发明实施例提供了一种水面机器人的禁区避让方法,包括:获取水面机器人在水面的航行路线;基于航行路线遍历水面的障碍物;对航行路线进行障碍物标记,并且基于障碍物标记触发水面机器人的禁区设置;获取水面机器人的禁区,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行;遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线。
5.另外,本发明实施例还提供了一种水面机器人的禁区避让系统,所述水面机器人的禁区避让系统包括:获取模块:用于获取水面机器人在水面的航行路线;遍历模块:用于基于航行路线遍历水面的障碍物;禁区模块:用于对航行路线进行障碍物标记,并且基于障碍物标记触发水面机器人的禁区设置;航行模块:用于获取水面机器人的禁区,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行;拐点模块:用于基遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;路线模块:用于根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线。
6.在本发明实施例中,通过本发明实施例中的方法,基于航行路线遍历水面的障碍物,并且对航行路线进行障碍物标记,以便于在航行路线上预先做好障碍物标记,基于障碍
物标记触发水面机器人的禁区设置,以形成水面机器人的禁区,此时,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行,另外,遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线,从而根据水面机器人的拐点标记和碍物标记对水面机器人在非安全区域进行安全操作,并且细化水面机器人在处于危险状态下动作调控,从而保证了水面机器人在非安全区域的安全路线,提高了水面机器人在航行路线的安全性。
附图说明
7.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
8.图1是本发明实施例中的水面机器人的禁区避让方法的流程示意图;
9.图2是本发明实施例中的水面机器人的禁区避让方法的航行路线的流程示意图;
10.图3是本发明实施例中的水面机器人的禁区避让方法的替换路线的流程示意图;
11.图4是本发明实施例中的水面机器人的禁区避让方法的禁区形成的流程示意图;
12.图5是本发明实施例中的水面机器人的禁区避让系统的结构组成示意图;
13.图6是根据一示例性实施例示出的一种电子装置的硬件图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
15.实施例
16.请参阅图1至图4,一种水面机器人的禁区避让方法,方法包括:
17.s11:获取水面机器人在水面的航行路线;
18.在本发明具体实施过程中,具体的步骤可以为:
19.s111:定位水面机器人的当前位置;
20.s112:基于水面机器人的当前位置进行航行路线的运算,并推导多个航行路线,各航行路线的安全等级不一样;
21.s113:对各航行路线进行安全等级划分,并且基于水面机器人以往的航行情况确定最终的航行路线。
22.其中,基于水面机器人的当前位置进行航行路线的运算,并且推导多个航行路线,此时,水面机器人的当前位置作为起点,并且将目标终点与起点进行路线交互,以便于形成多个不同方向的航行路线,并且基于以往的航行故障地点基于航行路线的等级划分,此时,各航行路线的安全等级不一样,并且引入了水面机器人的以往航行情况对最终的航行路线进行确定,此时,基于水面机器人以往的航行情况确定最终的航行路线。
23.s12:基于航行路线遍历水面的障碍物;
24.在本发明具体实施过程中,具体的步骤可以为:
25.s121:获取航行路线;
26.s122:基于航行路线进行障碍物检测,并且设定航行路线的检测区域;
27.s123:根据航行路线的检测区域依次对障碍物进行实时检测;
28.s124:若障碍物处于航行路线的检测区域,则触发水面机器人的避让动作,并且对于障碍物相对于航行路线的节点进行二次路线遍历,以输出替换路线;
29.s125:基于替换路线拼接至原有的航行路线,并且水面机器人沿着替换路线进行航行。
30.其中,基于航行路线进行障碍物检测,并且设定航行路线的检测区域,以便于根据航行路线的检测区域依次对障碍物进行实时检测,并且实时对障碍物进行测算,若障碍物处于航行路线的检测区域,则触发水面机器人的避让动作,并且对于障碍物相对于航行路线的节点进行二次路线遍历,以输出替换路线。
31.另外,替换路线根据障碍物的体形进行再次路线规划,并且替换路线作为安全等级较高的备用路线,以便于基于替换路线拼接至原有的航行路线,并且水面机器人沿着替换路线进行航行。
32.s13:对航行路线进行障碍物标记,并且基于障碍物标记触发水面机器人的禁区设置;
33.在本发明具体实施过程中,具体的步骤可以为:
34.s131:获取障碍物的流动方向;
35.s132:基于障碍物的流动方向和流动时间测算障碍物相对于航行路线的交汇点;
36.s133:根据障碍物相对于航行路线的交汇点确定航行路线的障碍物标记;
37.s134:基于障碍物标记触发水面机器人的禁区设置,其中,获取相邻的多个障碍物标记,并且基于多个障碍物标记形成禁区。
38.其中,基于障碍物的流动方向和流动时间测算障碍物相对于航行路线的交汇点,并且根据障碍物相对于航行路线的交汇点确定航行路线的障碍物标记,以便于以实际的障碍物的到位情况来测算航行路线的障碍物标记,并且基于障碍物标记触发水面机器人的禁区设置,其中,获取相邻的多个障碍物标记,并且基于多个障碍物标记形成禁区。
39.s14:获取水面机器人的禁区,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行;
40.在本发明具体实施过程中,具体的步骤可以为:获取水面机器人的禁区;对禁区的边缘设定强制退回信号,并且基于强制退回信号对外来电子设备进行驱散;水面机器人获取禁区的电子地图,并基于强制退回信号触发水面机器人的反向拐行;水面机器人沿着禁区外轮廓的安全间隔进行航行;水面机器人实时检测其周边的区域,并在禁区的周边进行实物检测。
41.s15:遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;
42.在本发明具体实施过程中,具体的步骤包括:遍历航行路线;获取水面机器人沿着航行路线进行拐弯的地点;基于水面机器人的拐弯的地点对航行路线进行标记,以形成拐点标记;依次对航行路线的拐线进行多个标记,并且定位拐点标记的拐向;水面机器人基于拐点标记和拐点标记的拐向进行定位拐动,并降低水面机器人的重心,以防止水面机器人
侧翻。
43.s16:根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线。
44.在本发明具体实施过程中,具体的步骤包括:获取水面机器人的拐点标记和碍物标记;根据水面机器人的拐点标记和碍物标记触发水面机器人的安全路线制定;根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线;对水面机器人进行航行防护,并且沿着非安全区域的安全路线进行航行,此时,对水面机器人进行动态检测,并测算水面机器人的姿态。
45.所述水面机器人的禁区避让方法,还包括:基于水面机器人的姿态预估侧翻的概率;实时监控水面机器人的重心;对水面机器人的重心进行多层次分析,并且对重心的变化量调控侧翻的概率。
46.在本发明实施例中,通过本发明实施例中的方法,基于航行路线遍历水面的障碍物,并且对航行路线进行障碍物标记,以便于在航行路线上预先做好障碍物标记,基于障碍物标记触发水面机器人的禁区设置,以形成水面机器人的禁区,此时,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行,另外,遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线,从而根据水面机器人的拐点标记和碍物标记对水面机器人在非安全区域进行安全操作,并且细化水面机器人在处于危险状态下动作调控,从而保证了水面机器人在非安全区域的安全路线,提高了水面机器人在航行路线的安全性。
47.实施例
48.请参阅图5,图5是本发明实施例中的水面机器人的禁区避让系统的结构组成示意图。
49.如图5所示,一种水面机器人的禁区避让系统,所述水面机器人的禁区避让系统包括:
50.获取模块21:用于获取水面机器人在水面的航行路线;
51.遍历模块22:用于基于航行路线遍历水面的障碍物;
52.禁区模块23:用于对航行路线进行障碍物标记,并且基于障碍物标记触发水面机器人的禁区设置;
53.航行模块24:用于获取水面机器人的禁区,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行;
54.拐点模块25:用于基遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;
55.路线模块26:用于根据水面机器人的拐点标记和碍物标记触发水面机器人在非安全区域的安全路线。
56.本发明提供了一种水面机器人的禁区避让方法及避让系统,基于航行路线遍历水面的障碍物,并且对航行路线进行障碍物标记,以便于在航行路线上预先做好障碍物标记,基于障碍物标记触发水面机器人的禁区设置,以形成水面机器人的禁区,此时,水面机器人基于禁区进行反向拐行,并沿着禁区外轮廓的安全间隔进行航行,另外,遍历航行路线,并对水面机器人的拐点进行标记,以形成拐点标记;根据水面机器人的拐点标记和碍物标记
access memory)、磁盘或光盘等。并且,其存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行根据上述的方法。
67.另外,以上对本发明实施例所提供的水面机器人的禁区避让方法及系统进行了详细介绍,本文中应采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1