一种动态三维交通仿真场景协同运行方法与流程
本发明属于智能交通,具体涉及一种动态三维交通仿真场景协同运行方法。
背景技术:
1、随着科学技术的快速发展,借助于现代计算机技术对城市交通运行状况进行三维交通仿真,真实模拟实际车辆的个体行为,并且呈现出各类交通措施的实际效果对科学有效地管理城市交通问题具有重要意义。交通仿真的研究重点是对路网和车辆行为进行建模,并且路网模型越精确、越完整,车辆行为模型越逼真、越高效,仿真系统给出的结果才越具有实际参考价值。
2、目前大部分的三维交通仿真系统侧重于研究复杂的车辆行为,而对于路网的仿真建模则较为简单,尤其在对大规模路网及复杂拓扑关系的建模方面较为欠缺。一部分交通仿真结果通常由专业的交通仿真软件给予三维可视化呈现,三维场景相对简单粗糙,光影效果无法达到或接近游戏引擎的真实效果;这些软件的开放性较差,其仿真结果难以在浏览器页面中直接展示;此外,这些软件搭建出来的三维交通场景缺少动态交互,比如车辆与信号灯之间,车辆与车辆之间等等。出现这些问题的原因主要包括:(1)场景中搭建的路网缺乏真实性,与真实世界路网轨迹差别较大;(2)在搭建完三维交通场景中的路网后没有进一步优化路网;(3)对场景信号灯缺少建模,场景中的信号灯只是模型。
3、为了有效解决上述问题,基于carla和虚幻引擎构建动态三维交通仿真平台,运用地图匹配算法来映射真实世界的路网轨迹数据生成交通路网,该方法保持了较高的精度,且避免了对cpu密集型和内存昂贵的预处理的任何要求;此外,可以有效地将gps轨迹映射到三维交通场景当中生成交通路网并通过高采样率来加速路由距离计算来实现的高精度轨迹数据的输入;通过bebot运行轨迹的方法,可以基于映射的真实世界路网轨迹数据为三维交通场景中的车辆生成运行轨迹,并使轨迹规划器能够有效地评估和执行车辆轨迹沿线的约束,包括最大速度和角速率以及轨迹之间以及车辆和障碍物之间的最小距离,从而可以有效地为单个和多个车辆生成可行且无碰撞的轨迹,并且可以部署在复杂环境中的实时安全关键应用程序中。
4、通过三阶段约简的估计和优化启发式算法来优化三维交通场景中的路网,以有效地评估和提高映射到三维场景中的路网轨迹的可靠性;提出一种自底向上的约简算法来估计网络的可靠性;接着提出了一种自顶向下的方法,通过使用数学优化模型来提高道路网络的可靠性;基于雾的tsc图形rl模型使用一种可扩展和分散的方法,采用分散方法,网络拓扑的图形结构与交通信号和十字路口以及它们的相对邻接保持一致;通过可扩展的tsc模型,减少场景中所需的支持性基础设施的数量,并使用雾节点分解优化后的三维交通仿真场景中的路网,使得每个路网节点匹配对应路段内的信号灯,实现路网、车辆和信号灯之间的动态数据传输。
技术实现思路
1、本发明的目的是提供一种动态三维交通仿真场景协同运行方法,以构建真实动态的三维交通仿真场景为研究切入,映射路网轨迹数据生成并优化交通路网,构建在复杂场景下的车辆运行与动态信号灯的场景,实现三维仿真交通协同运行。本发明对构建真实动态的三维交通仿真场景的研究切入点较全面,为构建动态三维交通仿真场景协同运行提供系统性理论参考与引导;充分运用地图匹配算法来映射真实世界的路网轨迹数据生成交通路网,基于bebot运行轨迹的方法为单个和多个车辆生成可行且无碰撞的轨迹,基于三阶段约简的估计和优化启发式算法,以有效地评估和提高映射到三维场景中的路网轨迹的可靠性;构建基于雾的图形模型,实现场景信号灯与车辆之间的动态交互并在输出日志中记录场景中各个部分的运行状况并将相关信息记录到后台数据中,为交通技术人员搭建动态三维交通仿真场景时提供更好的参考依据。
2、本发明提供了如下的技术方案:
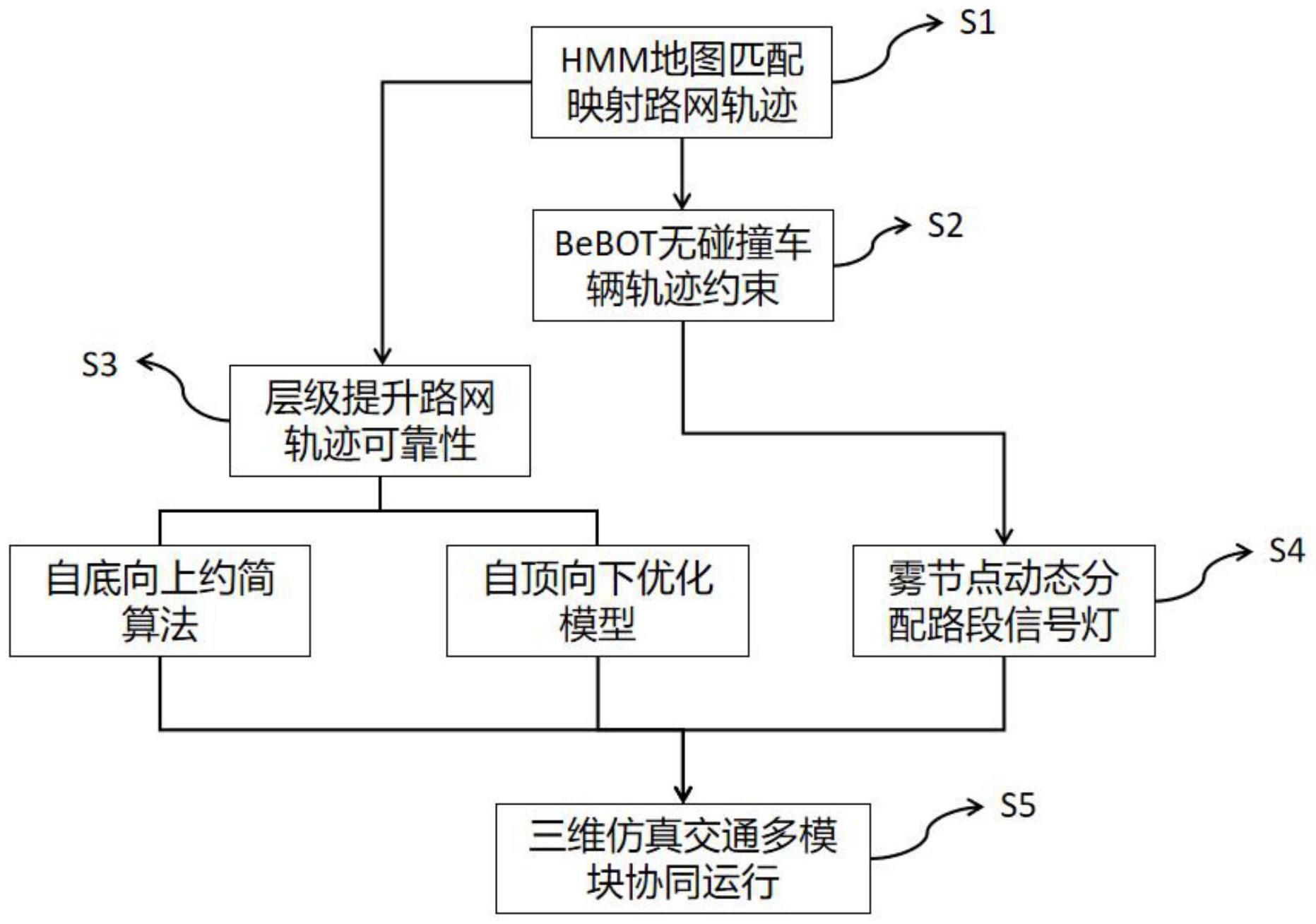
3、一种动态三维交通仿真场景协同运行方法,包括以下步骤:
4、s1:映射路网轨迹数据生成交通路网;
5、s2:构建在复杂场景下的车辆运行场景,部署在复杂环境中的实时车辆运动轨迹;
6、s3:构建自底向上和自顶向下的协同双向算法优化路网,该步骤与s2步骤不分先后;
7、s4:构建基于雾的图形模型,实现场景信号灯与车辆之间的动态交互;
8、s5:实现三维仿真交通协同运行;
9、在s1步骤中,采用基于隐马尔可夫模型(hmm)的地图匹配算法来映射真实世界的路网轨迹数据生成交通路网,该方法保持了较高的精度,且避免了对cpu密集型和内存昂贵的预处理的任何要求,该地图匹配方法,可以有效地将gps轨迹映射到三维交通场景当中生成交通路网;通过高采样率来加速路由距离计算来实现的高精度轨迹数据的输入;该算法考虑了场景路线图大小,即如果路线图大小(或路线图密度)较大,则运行时性能会下降,对此采用地图拼接方法,将行程划分为较短的gps点集,使用路线图的这些较短部分进行地图匹配,有效提高算法的计算时间。
10、在s2步骤中,采用基于bebot运行轨迹的方法,使轨迹规划器能够有效地评估和执行车辆轨迹沿线的约束,包括最大速度和角速率以及轨迹之间以及车辆和障碍物之间的最小距离,从而可以有效地为单个和多个车辆生成可行且无碰撞的轨迹,并且可以部署在复杂环境中的实时安全关键应用程序中。
11、所述步骤s2包括以下步骤:
12、s21:通过矩阵来评估交通场景中路网界限,路网界限矩阵h如下所示:
13、
14、其中h1n为场景中可容纳的路网长度上界限;
15、h2n为场景中可容纳的路网长度下界限;
16、在路网界限矩阵h中寻找满足车辆运行的路网上下限hmin和hmax,计算提升矩阵数据库,以低计算成本生成边界的严密估计;
17、s22:在s21步骤的基础上,采用递归分割曲线来计算路网界限矩阵h的极值,输入伯恩斯坦多项式的系数:
18、bn=[b0,n,b1,n,…,bn,n]
19、bn,n为第n个路网第n段的伯恩斯坦多项式系数;
20、在伯恩斯坦多项式找到路网中第n个路网第n段两个端点的最大值,通过求bn的最大值来确定上界;确定完bn中的上界后再确定是否应该用当前下界替换全局下界,并修改当前的伯恩斯坦系数集;对修改后的伯恩斯坦系数集指定一个全局最小界限α,如果任何子集的上界低于α,则可知任何点都不可能是全局最大值;最后确定上下限之间的差异是否在所需的公差范围内,如果满足公差,则返回全局最小界限α,当前伯恩斯坦多项式的系数则为最优的系数;
21、s23:计算车辆在三维交通场景路网运行时所需的最小空间距离,基于获得到的最优伯恩斯坦多项式的系数,即下界(p,q)=max{p[0]-q[0],p[0]-q[n],p[m]-q[0],p[m]-q[n]},其中m和n分别是由p和q表示的多项式的次数;如果当前上界较小,则更新全局上界α;如果当前下限大于全局上限,则不可能将其作为最小距离;如果满足所需公差,则返回α;由p和q定义的伯恩斯坦多项式进行行分割,并递归调用算法,分割的第一个选项是在中间点简单分割;对于分割曲线的第二个选项,并使用出现最小距离的位置来选择分割点,在分割出现的距离中的最小值即为最小空间距离;
22、s24:使用碰撞检测算法来快速检查轨迹的可行性,输入被比较的伯恩斯坦多项式的系数p和q,以及最大迭代次数max_iterate;从while循环一直运行,直到确定不存在碰撞或达到最大迭代次数;find_collisions()函数使用改进的gjk算法来确定p中的哪些车辆轨迹与q中的车辆轨迹发生碰撞;通过if语句检查是否发现了碰撞,如果pcol和qcol都为空,则不存在碰撞,如果确实存在碰撞,则分割发现碰撞的所有车辆轨迹,并将其添加到要检查的集合中;如果满足最大迭代次数,则算法返回碰撞是可能的,依次反复,直至不存在碰撞为止。
23、在s3步骤中,采用一种新的基于三阶段约简的估计和优化启发式算法,以有效地评估和提高映射到三维场景中的路网轨迹的可靠性;提出一种自底向上的约简算法来估计网络的可靠性;接着提出了一种自顶向下的方法,通过使用数学优化模型来提高道路网络的可靠性。
24、所述s3步骤包括以下步骤:
25、s31:将三维交通场景中需要更换或删除所有复杂的路网通过bu算法进行简化操作,采用路网节点和路网可靠性对三维场景中的道路路网重要性进行定义,其中对应表达式为:
26、
27、式中m(ηij)的含义为:三维交通场景中道路路网重要性度量参数;
28、的含义为:第i个路网节点重要性参数,使用平方来明确节点参数设置对路网的影响程度;
29、为在路网ηij中的第i个路网的输入节点参数;
30、为在路网ηij中的第i个路网的输出节点参数;
31、为在路网ηij中的第i个路网的输入节点最大值参数;
32、为在路网ηij中的第i个路网的输出节点最小值参数;
33、r(ηij)为在路网ηij的可靠性参数;
34、rmax为三维交通场景中整体路网的最大可靠性参数;
35、s32:采用维护措施提高三维交通场景中道路路网的可靠性,通过两个优化模型来进行网络可靠性评估和拓扑优化,网络可靠性优化模型的目标函数是在预算约束下的可靠性最大化,其中串联结构拓扑优化模型对应表达式为:
36、
37、式中的含义为:三维交通场景中道路网络最小维护成本;
38、λs代表如果路网s升级,则为1,否则为0,取值范围为0~1;
39、psubnets为维护升级路网s的成本;
40、δrsubnets为道路网络子网可靠性提高量;
41、pemin为预期最小维护成本;
42、pemax为预期最大维护成本;
43、paccept为可接受的维护成本;
44、为了考量串联结构拓扑优化模型关于路网的可靠性,在式中进入可靠性分式,采用根号来弱化可靠性分式对于路网最小维护成本的影响。
45、且串联结构拓扑优化模型有如下的附属表达式作为对模型的进一步补充说明:
46、re(g')≥(1+α)2re(g)
47、
48、
49、r′subnets=λs(rsubnets+δrsubnets)+(1-λs)rsubnets
50、式中re(g)为三维交通场景中局部网络g的路网可靠性;
51、re(g')为三维交通场景中提升后的局部网络g的路网可靠性,且大于等于0;
52、α为提升路网系数;
53、rsubnets为道路网络子网可靠性;
54、r'subnets为改善后的道路网络子网可靠性,且小于等于1;
55、另一个优化模型为并联结构拓扑优化模型,其表达式为:
56、
57、式中的的含义为三维交通场景中并联道路网络最大路网可靠性;
58、且并联结构拓扑优化模型有如下的附属表达式作为对模型的进一步补充说明:
59、
60、
61、s33:对当前三维仿真场景中的路网进行细化操作,查看是否可以添加新车道到当前路网当中,以最大限度地提高其网络可靠性,并考虑路网最小维护成本和并联道路网络最大路网可靠性对模型的相关影响,模型对应表达式为:
62、
63、式中的pii的含义为:添加新车道所提升的路网最大可靠性;
64、为通过向路网m添加新车道来提高网络可靠性;
65、为如果向当前路网m添加新车道,则为1,否则为0;
66、m为第m个路网,范围从1到v;
67、该模型有如下的附属表达式作为对模型的进一步补充说明:
68、
69、
70、为向当前路网m添加新车道所需成本;
71、为如果向当前路网m添加新车道,则为1,否则为0;
72、为通过向路网m添加新车道来提高网络可靠性;
73、s34:对于当前仿真场中的交通路网进行操作,找出哪个部分的路网可以最大限度地提高网络可靠性,模型对应表达式为:
74、
75、式中的piii的含义为:当前路网可以提升的最大网络可靠性幅度;
76、为通过添加新的连接路网提高网络可靠性;
77、为如果添加了新的连接路网q,则为1,否则为0;
78、该模型有如下的附属表达式作为对模型的进一步补充说明:
79、
80、
81、为添加新的连接路网所需成本;
82、最终通过以上相关的模型来有效评估和提高三维仿真场景中交通道路网络的可靠性。
83、在s4步骤中,采用一个可扩展的tsc模型,减少场景中所需的支持性基础设施的数量,通过使用雾节点分解优化后的三维交通仿真场景中的路网,使得每个路网节点匹配对应路段内的信号灯,实现路网、车辆和信号灯之间的动态数据传输,所提出的基于雾的tsc图形rl模型使用了一种可扩展和分散的方法;采用分散方法,网络拓扑的图形结构与交通信号和十字路口以及它们的相对邻接保持一致;在算法结构中,每个rsu都表示为一个雾节点,雾节点作为一个代理,为其监督的每个十字路口选择交通信号相位,从而减少拥堵;使用gat对网络拓扑和信息注意力进行建,监控三维交通场景中的多个十字路口,每个雾节点i生成对节点特征hi进行编码的节点嵌入;状态是nxf节点特征矩阵xt和nxn邻接矩阵at的元组,其中n是路网节点总数,f是每个节点中的特征数;特征矩阵考虑交叉口每个进站车道上第一辆车的累积延误以及每个进站车道上接近车辆的总数。
84、在s5步骤中,在依次完成路网的映射、场景车辆的配置、路网的优化以及场景信号灯的动态交互后,可以对场景进行协同仿真运行,在仿真运行的过程中,会在输出日志中记录场景中各个部分的运行状况并将相关信息记录到后台数据中;对于场景中出现的问题及时反馈到界面窗口,并展示问题所在路径,从而迅速解决场景问题,确保场景中各个模块的协同运行。
85、本发明的有益效果是:
86、本发明研究针对三维交通场景的搭建,提出了相对系统性的方案,根据多学科交叉思路,考虑到构建动态三维交通仿真场景会呈现更好的协同运行视觉效果,明确了构建动态三维交通仿真的流程。
87、本发明对真实动态的三维交通仿真场景的研究较全面;通过映射路网轨迹数据生成并优化交通路网;构建在复杂场景下的车辆运行与动态信号灯的场景;实现三维仿真交通协同运行;在输出日志中记录场景中各个部分的运行状况并将相关信息记录到后台数据中,为交通技术人员搭建动态三维交通仿真场景时提供更好的参考依据。
- 还没有人留言评论。精彩留言会获得点赞!