基于行为特性需求的道路交通组织方案优化方法及装置与流程
本发明涉及道路交通,具体来说,涉及基于行为特性需求的道路交通组织方案优化方法及装置。
背景技术:
1、当今城市普遍面临着日益严重的交通拥挤问题。城市交通拥挤主要表现为道路拥挤,是指道路上的车辆密度(道路上单位距离内的车辆数目)过大使得车辆速度受到影响的一种现象。为改善交通拥挤状况,各地政府都采取了相应的措施,如增加城市交通基础设施建设方面的投资;建立立体交通体系;采取行政、经济手段抑制交通需求;发展和完善公共交通等。
2、城市交通拥挤,从理论上讲是交通需求超过交通供给能力引起的。在城市的发展过程中,由于城市聚集效益的原因,人口和物质生产活动向城市大量集聚,城市高强度的土地开发,以及随着经济发展和人们收入水平的提高所带来的出行机动化的迅猛发展,必然会使城市交通需求,尤其是对道路的需求持续增长。但是城市交通供给能力的增长却呈现出跳跃性、阶段性的特征。交通设施一旦建成,短期内便难以改变。并且,交通设施的建成,往往又会形成新的交通源。因此,交通拥挤现象很容易发生,在某种程度上说,也是难以避免。道路交通组织优化是在有限的道路空间上,科学合理地分时、分路、分车种、分流向使用道路,使道路交通始终处于有序、高效运行状态。
3、道路交通组织优化是在有限的道路空间上,科学合理地分时、分路、分车种、分流向使用道路,使道路交通始终处于有序、高效运行状态。交通组织从研究的范围大小及内容可以分为微观交通组织、区域交通组织、宏观交通组织三个方面。其中微观交通组织是区域交通组织的基础,而宏观交通组织主要指宏观的交通政策。微观交通组织是区域交通组织的基础,它包括交叉口交通组织、路段交通组织和路口路段一体化交通组织。当前微观交通组织主要是研究交叉口的交通组织。
4、目前来说,道路交通组织优化主要是考虑道路通行能力、交通安全等通行效能表征指标,很少综合交通参与者行为微观特性以及环境对交通参与者的影响进行系统设计,容易导致虽然经过了交通组织优化设计,但是往往造成不符合交通参与者的行为特征,很可能引发交通秩序混乱,交通违法行为高发等问题,影响通行能力,也对交通安全造成威胁。因此当前道路交通组织优化方法,未充分系统考虑道路交通影响因素,无法有效优化道路交通方案。
5、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出基于行为特性需求的道路交通组织方案优化方法及装置,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
3、根据本发明的一个方面,提供了基于行为特性需求的道路交通组织方案优化方法,该方法包括以下步骤:
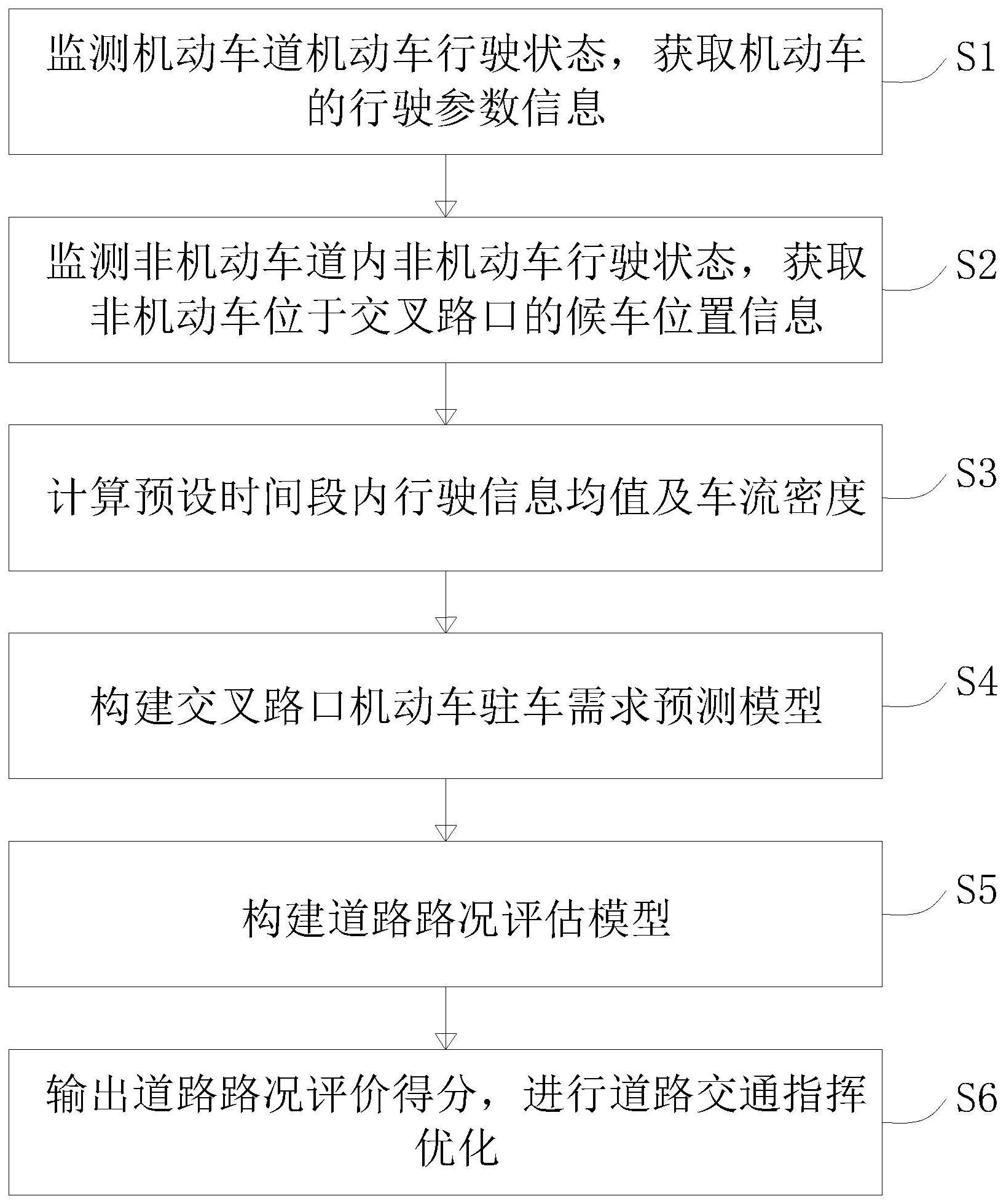
4、监测机动车道机动车行驶状态,获取机动车的行驶参数信息;
5、监测非机动车道内非机动车行驶状态,获取非机动车位于交叉路口的候车位置信息;
6、计算预设时间段内行驶信息均值及车流密度;
7、构建交叉路口机动车驻车需求预测模型;
8、构建道路路况评估模型;
9、输出道路路况评价得分,进行道路交通指挥优化。
10、进一步的,所述监测机动车道内机动车行驶状态的装置包括若干等距设置的高清摄像头及测速雷达,所述高清摄像头及测速雷达将所述机动车道纵向划分为若干区间,且所述机动车道包括横向设置的右转车道、直行车道与左转车道,且每个车道内均单独设置有测速雷达。
11、进一步的,所述非机动车道包括行车区域与设置在交叉路口内的违停区域,位于违停区域内且保持驻车的非机动车视为违停车辆,并采用交叉路口的高清摄像头对违停车辆数量进行监测与记录。
12、进一步的,所述行驶参数信息包括采用测距雷达进行测量机动车行驶速度与车头时距。
13、进一步的,所述计算校准后的机动车道单个测速区间预设时间段内若干机动车行驶速度均值及的车流密度包括以下步骤:
14、监测机动车道机动车行驶状态,获取机动车的行驶参数信息,所述行驶参数信息包括采用测距雷达和车辆内部的导航软件进行测量并计算校准后的机动车行驶速度与车头时距,计算校准后的机动车道单个测速区间预设时间段内若干机动车行驶速度均值及车头时距均值,计算公式如下:
15、
16、
17、其中,v为校准后的机动车道单个测速区间预设时间段内若干机动车行驶速度均值,表示区间ab段单车道内若干车辆的测速的平均行驶速度,vm为基于车辆内部导航软件测量的并且经过当前车道的限速值进行筛选后的平均行驶速度值,vib-a表示车辆i的测速的行驶速度,n表示区间ab段内的车辆总数,所述车头时距均值计算同上;
18、计算动车道单个测速区间预设时间段内的单个车道的车流密度,计算公式如下:
19、
20、其中,k(t)表示车流密度,t0表示监测起始时间,t表示监测时长,a表示区间起始位置,b表示区间终点位置,qa(t)表示t时刻从a处驶入的车辆数,qb(t)表示t时刻从b处驶出的车辆数,l表示区间距离,e(t)表示t时刻ab区间内存在的车辆数,公式为e(t)=e(t0)+qa(t)-qb(t),e(t0)表示在观测开始时间t=t0,观测区间ab之间初始车辆数。
21、进一步的,所述构建交叉路口机动车驻车需求预测模型的计算公式如下:
22、pmt=pm(t-1)+∑bm(δt-λt),t=1,2,…;
23、pm0=∑bmη;
24、其中,pm表示机动车道内m车道的驻车位置需求,pmt表示机动车道内m车道t时间段内的驻车位置需求,pm0表示初始时刻驻车辆,bm表示m车道的长度规模,δt表示t时间段内产生的交通到达量,λt表示t时间段内所产生的交通驶离量,η表示单位用地面积上的初始驻车辆。
25、进一步的,所述构建道路路况评估模型包括以下步骤:
26、将所述行驶参数信息均值、车流密度及交叉路口驻车需求信息及非机动车违停数量作为道路信息数据;
27、分析处理所述道路信息数据内部结构特征,建立道路信息集;
28、分析道路信息集内信息变化情景,提取道路路况动态指标;
29、将所述道路路况动态指标作为贝叶斯网络节点,确定贝叶斯网络结构,再运用互信息法对所述道路路况动态指标的相关性进行排序并筛选贝叶斯网络节点;
30、输入贝叶斯网络节点参数,得出道路路况评估模型。
31、进一步的,所述运用互信息法对所述道路路况动态指标的相关性进行排序具体运算方法是:
32、
33、其中i(x;y)为指标x和指标y的联合概率分布,p(x)和p(y)分布表示指标x和指标y的边际概率分布,i(x;y)值越大,则相关性越强,排序越靠前。
34、进一步的,所述i(x;y)值小于等于0.04则表示道路交通路况畅通,所述i(x;y)值大于0.04小于0.06表示道路路况一般,有轻微或部分堵车情况,所述i(x;y)值大于等于0.06表示道路堵塞。
35、根据本发明的另一个方面,还提供了基于行为特性需求的道路交通组织方案优化装置,该装置包括测速雷达、高清摄像头及接收控制中心;
36、其中,测距雷达与高清摄像头等距设置在机动车道路边及交叉路口。
37、本发明的有益效果为:通过对道路内的机动车行为进行分车道的实时监测,能够保证获取更精确的车况数据与路况信息,通过对不同车道、不同时间段及不同区间的机动车监测,能够扩大道路路况的分析及识别能力,即综合多区间内车辆的行驶速度及车头时距,能够在车辆进行交叉路口前进行路况分析,基于车辆的行为特性判断实时路况;并在进入交叉路口时,通过引入交叉路口机动车驻车需求预测模型,能够结合路口前驻车需求情况精确判断路口堵车情况,进一步提高路况分析的能力与精确度,便于对交通组织进行针对性优化与解决,同时引入非机动车监测,扩大对道路路况的分析范围,增加非机动车对道路路况的影响,更贴合实际,提高交通组织的安全有序畅通。
- 还没有人留言评论。精彩留言会获得点赞!