电动化模块车调度模式设计及智能决策方法
本发明属于智能交通领域,涉及到自动化电动化模块化的小型公交车在公共交通网络的调度技术和基于不同需求场景的智能决策技术,具体为电动化模块车调度模式设计及智能决策方法。
背景技术:
1、近年来,由于不匹配的交通网络容量与日益增长的出行需求以及高增长的机动化私家车出行比例,大城市交通拥堵与环境污染问题始终难以得到有效解决。大力发展电动化公交车、地铁等大运力的公共交通出行工具以减少有限交通路网中的出行车辆数,被认为是缓解交通拥堵的有效手段。但传统公共交通服务由于固定的车辆容量始终难以满足多变的时空需求。目前研究主要以线路设计、发时刻表优化,公交调度等一方面或多方面为切入点,以此提高公交运能与出行需求的匹配度和公交车队运营的经济性。
2、近些年随着无线通信、车载传感和人工智能等技术的成熟,蓬勃发展的自动驾驶汽车为公共交通领域的革新带来了新的契机。尤其一种新兴的自动化电动化模块车技术,其主要载体是车身小巧的模块车,可容纳6-10个人。每个模块车既可以独立运营,也可通过耦合/拆解组成不同长度的模块队列以实现车容量的动态调整,匹配时变的出行需求。通过文献和专利检索可以发现,gao等人在文献[gao hong,li ang,wang jiangbo,liu kai,zhang li.design of an intelligent platoon transit system towardstransportation electrification[j].world electric vehicle journal,2022,13(8).]从设计了一个基于电动化模块车的智能车列系统,其所涵盖的六个子系统和所适用的场景从宏观的角度被阐述。范林强等人在专利[范林强,刘昱岗,易洪波.一种无间断主线的模块化公交运行及充电调度方法[p].四川省:cn115115243a,2022-09-27.]中研究了支线模块公交车通过灵活调度和充电辅助主线模块公交的不间断运营的单线调度策略。刘小寒等人在文献[刘小寒,马晓磊,刘钲可.面向公共交通的电动自动驾驶模块车调度优化[j].中国公路学报,2022,35(03):240-248.]中优化了公交线路中模块车的购置数量、发车频率等变量以最小化车辆运营成本、乘客等待时间等多项成本在内的总成本。
3、但目前关于模块车研究成果存在两个问题,一方面是普遍假设模块化车辆已经处于全天候全场景的自动化阶段,忽略了目前无人驾驶技术的局限性和车辆自动化水平的不同对公共交通调度系统的成本影响。另一方面大部分研究更偏向于从微观的角度对模块车进行某一给定场景下的调度派遣,没有考虑多场景需求特点下服务模式选择的差异性。因此本发明提出一种电动化模块车调度模式设计及智能决策方法解决传统公交运能与出行需求不匹配的问题,为交通运营者如何根据出行需求特点智能决策多车辆自动化发展阶段下的服务模式提供方法依据。
技术实现思路
1、针对传统公共交通调度难以契合多变的不同区域或不同时段的出行需求这一现状,本发明提出一种电动化模块车调度模式设计及智能决策方法。基于自适应容量的模块车技术设计了模块车在多班次公共交通网络的调度模式,最小化包括车辆派遣成本、能耗成本等多项成本在内的系统总成本,以提高公共交通运营的经济性。特别地,鉴于目前自动化车辆技术的不成熟和普及的有限性,对于模块车的调度系统差异化考虑了车辆不同自动化发展阶段所带来的人力成本影响。之后设计多个具有典型需求特点的出行场景,分析了不同自动化阶段模块车的网络调度模型的应用潜力,对于公共交通运营者如何进行服务模式的智能化决策或切换以适应不同出行需求具有指导意义。
2、本发明的技术方案:
3、电动化模块车调度模式设计及智能决策方法,步骤如下:
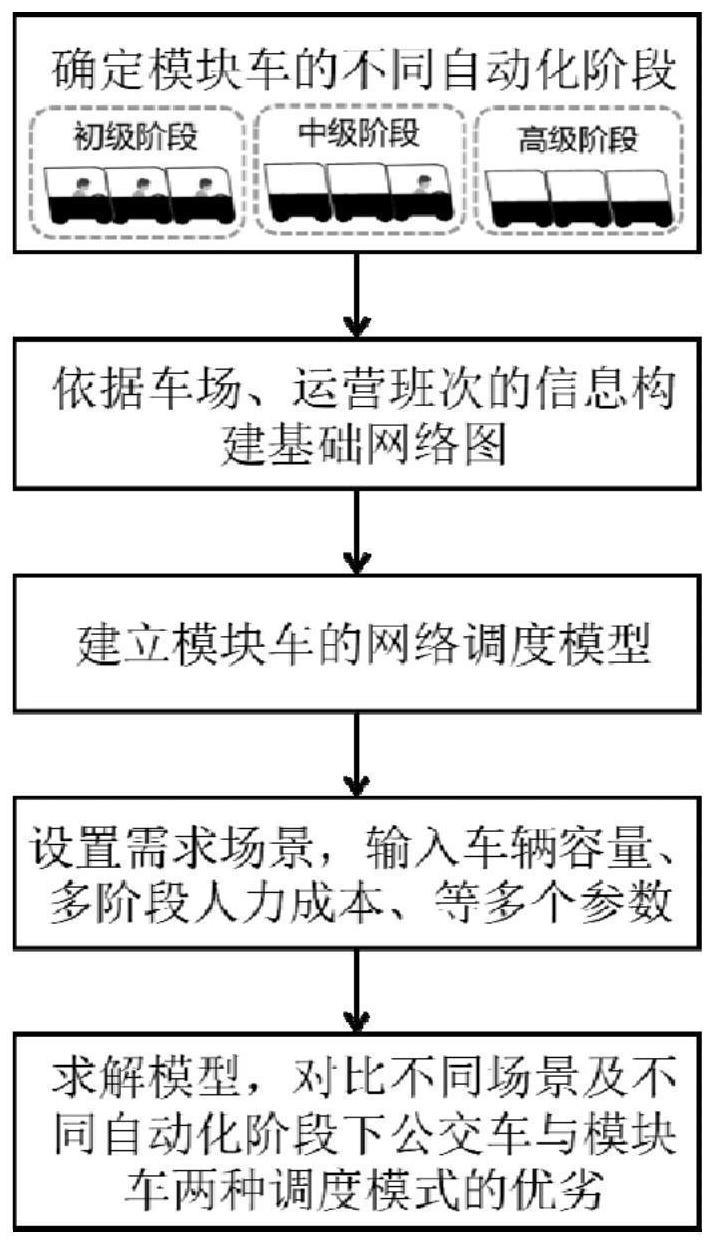
4、步骤(1)、确定电动模块车的不同自动化阶段
5、定义三个模块车自动化阶段,分别是初级阶段、中级阶段和高级阶段。初级阶段中模块车的主要控制者是驾驶员;中级阶段的模块车调度系统可以开启引导模式,只为多模块组中领头车辆以及需要与模块组解离的模块车辆配备驾驶人员,其他模块车则作为跟随车辆,由领头车辆引导行驶;高级阶段是无人驾驶,调度系统中不存在人力成本支出。
6、步骤(2)、构建多班次的运行网络图
7、引入有向图g=(n,a)来表示模块车在公共交通网络的调度问题,其中n是所有节点的集合,a是弧段集合。在节点集合n={s,e}∪i∪f中,每个节点i都具有开始时间zi、结束时间ui、起始地点oi、结束地点di、最大客流需求qi和线路长度li。节点s和e分别作为场站的出口和进口,是已知的。节点集合i作为集合n的一部分,是运营线路所有出行班次的集合,并且需要被要多个模块车耦合以覆盖最大截面客流。临时场站节点集合f包含了一系列关于车场的时间扩展节点,也就是说该类节点并非真实的场站节点,是与同一车场相关联的不同时间维度下临时虚拟的车场节点。车辆可以在执行班次后进入该类节点临时停靠,随后继续去执行其他班次,这与只允许车辆离开的起始节点s和只允许车辆返回的结束节点e是不同的。设置该节点一方面可以避免模块车在场站外的长时间等待,占用路面资源。另一方面便于计算具有时间序列的模块车路径链。需要注意的一点是,在网络图中每δ分钟生成一个临时停靠车场节点,且临时停靠车场节点允许车辆停靠λ分钟,尽管这与一辆模块车可以选择完成班次后的任意时间返回车场停靠这一实际操作有偏差,但避免了网络图中设置无限个临时的车场节点造成的计算困难。
8、在网络图中不必每条弧段都进行连接,像出发车场i=s到结束节点j=e或班次i∈i到出发车场j=s等一些其他类型的弧段显然不合理。根据实际情况,连接以下五种类型的弧段:(1)从出发车场i=s到班次j∈i;(2)从班次i∈i或临时停靠车场i∈f到班次j∈i;(3)从班次i∈i到临时车场j∈f;(4)从临时车场i∈f到临时车场j∈f;(5)从班次i∈i到结束节点j=e的行程。
9、进一步地,在第(2)-(4)类弧段中,需要进一步根据节点i的班次开始时间zi和班次结束时间ui确定可连接弧段类型中的可行弧段,dij表示从节点i的终点位置到节点j起点位置的空驶时间。在第(2)-(3)类弧段中,根据时刻表约束,节点i结束后空驶到达节点j的时间不应大于节点j的开始时间zj,可以表达为ui+dij≤zj-θ,其中一个较小的常数θ被引入以保证模块车耦合-分离的操作时间。如果车辆不需要连接,则可以把常数θ看作时间限制的弹性调节,对整体的调度过程影响很小。同时对于zj远大于ui+dij所导致的车辆的长时间等待的情况,引入常数η来解决,即zj-η≤ui+dij。综上,只有满足zj-η≤ui+dij≤zj-θ,弧段(i,j)才被认为是可行弧。在第(4)类弧段中,车辆从一个临时车场i∈f到另一个临时车场j∈f,虽然在网络图中对应的是两个不同的时间节点,但对应的是同一个场站,车辆并不需要发生实际的地址转移,因此将这类弧段的连接条件简化表示为ui=zj。
10、步骤(3)、建立模块车的网络调度模型
11、基于步骤(2)提出的模块车有向图g,首先建立只有模块车的调度模型。注意,区别于传统公交车的调度准则,即一个公交车覆盖一个班次,模块车完成前序班次后,仍需根据后续班次的客流需求进行分耦合/解离的操作,这就涉及前序班次i派遣多少数量的模块车到班次j的问题。为了突出运营不同长度的模块车组所造成的成本差异,需要在弧段(i,j)∈a的基础上引入参数r∈r用以表示同一弧段上行驶的不同长度r的模块车组,其中集合r={1,2,…rmax}共包含rmax种长度的模块车组。另cijr代表网络图中长度r的模块车组经过弧段(i,j)的弧段成本,具体地,对于模块车网络中不同的弧段类型,将cijr表示为:(1)cijr=cv1r+cv2r+ct1r·dij+ce·eijr,如果i=s,j∈i;(2)cijr=ct1r·dij+ce·eijr+cw·wij·r,如果i=i∪f,j∈i∪f;(3)cijr=ct1r·dij+ce·eijr,如果i∈i,j=e。
12、cijr的表达式中,式(1)代表从场站s发出的车辆的弧段成本,由四部分组成,分别是:cv1r代表长度为r的模块车组的车辆派遣成本;cv2r代表长度为r的模块车组的人力派遣成本;ct1r·dij为长度r的模块车组的单位时间空驶成本与空驶时间dij的乘积;ce和eijr分别为每kwh的能耗成本和长度r的模块车组在弧段(i,j)∈a的电力能耗值,其中eijr由长度r的模块车组的单位长度能耗值er与弧段(i,j)的长度lij相乘得到,也就是eijr=er·lij。这里需要强调的是,受模块车自动化水平的制约,模块车系统的初级、中级、高级三个阶段分别对应不同的人力成本。式(2)除了空驶成本和能耗成本还包括一项等待成本cw·wij·r,其中wij=max{[zj-ui-dij],0}代表车辆从节点i结束空驶到节点j后,距离节点j的开始时间zj的等待时间。对应地,cw则为单模块车的等待成本。式(3)表示长度为r的模块车组回到场站e。
13、具体地,包含模块车队的调度问题表达式为:
14、
15、
16、
17、
18、
19、
20、
21、
22、
23、目标函数函数(1)旨在最小化模块车调度系统的总运营成本,由弧段成本和班次的成本共同组成。具体地,在班次的成本中,由班次运营成本和班次能耗成本组成,其中代表长度的模块车组的单位时间载客行驶成本,由长度的模块车组的单位长度能耗值与班次i的长度li相乘可以得到,也就是对于弧段(i,j),由决策变量xijr来决定弧段是否被选择。对于班次i∈i,其所有前序班次到该班次的派遣弧段都被决定后才能确切得知执行该班次的模块车组长度,进而决定运营成本。因此在班次的成本需引入另一个决策变量来确定班次i最终是否由长度的模块车组执行。
24、约束(2)确保所有前序班次派遣至班次i∈i的模块车的总容量足以覆盖最大截面客流需求qi,且不超过模块车组所允许的最大容量,rmax的设定是为了避免模块车组长度太长导致的路面行驶拐弯困难的问题。约束(3)要求在可连接的弧段(i,j)∈a之间至多派遣一种长度的模块组。约束(4)定义可分离合并的车流量在每个节点的守恒条件,即对于除首末场站的节点,都需要保持进入的模块车数量与流出的模块车数量相等。约束(5)表示从车场s出发的模块车辆数与回到车场e的车辆数保持一致。班次i∈i被约束(6)定义,即只能由一种队列长度的模块组执行。约束(7)表明了决策变量和xjir之间的关系,即前序节点分配至节点i的车辆耦合后刚好用于执行班次i。约束(8)-(9)给出了变量类型。
25、步骤(4)、设置需求场景
26、根据现有公交线路运营班次的乘客需求,设置多个具有典型特点的出行需求场景作为模型输入,以此全面分析不同自动化水平下的模块车调度系统的经济性能。
27、步骤(5)、求解模型
28、步骤(3)所提出的调度模型属于混合整数规划问题,可以使用gurobi,cplex等商业求解器直接求解。
29、步骤(6)、多需求场景下调度模式的智能决策
30、基于步骤(4)设置的每个需求场景,将本发明所提出的模块车调度模式在三个自动化阶段下的优化结果与传统公交调度模式进行对比,为不同出行需求的运营场景如何智能决策车辆调度模式提供有效指导。目前广泛实施的传统公交的调度模式是在已知的班次网络图中派遣一定数量的公交车去完成所有的班次任务,且每个班次仅被一辆公交车覆盖一次。
31、本发明的有益效果:
32、本发明所提出的模块化调度模型可以通过模块车耦合/拆解的技术实现动态容量控制,以契合多变的时空需求,提高公共交通系统运营经济性以及改善乘客出行服务质量。同时通过制定多类需求场景下调度模式的对比框架,为交通运营者在模块车技术发展初-中-高三个阶段下根据区域具备的需求特点智能决策调度模式提供了技术支持。
- 还没有人留言评论。精彩留言会获得点赞!