信号灯的控制方法、装置、设备及计算机可读存储介质与流程
本技术实施例涉及控制,特别涉及一种信号灯的控制方法、装置、设备及计算机可读存储介质。
背景技术:
1、随着人们生活水平的不断提高,汽车在人们的生活中越来越普遍,在行车过程中,经常会遇到等信号灯的情况,尤其在上下班高峰期,交通非常拥堵,严重耽误上下班时间。
2、然而无论路口的车流量的多少,路口信号灯的时长都固定不变,这时常会出现第一道路的车流量很大但第一道路的信号灯为红灯,而第二道路的车流量很小但第二道路的信号灯为绿灯,导致第一道路拥堵严重,而第二道路流畅但是鲜少有车辆,进而使得第一道路的车辆的通行时长较长、通行效率较低。
技术实现思路
1、本技术实施例提供了一种信号灯的控制方法、装置、设备及计算机可读存储介质,可用于解决相关技术中的问题。所述技术方案如下:
2、一方面,本技术实施例提供了一种信号灯的控制方法,所述方法包括:
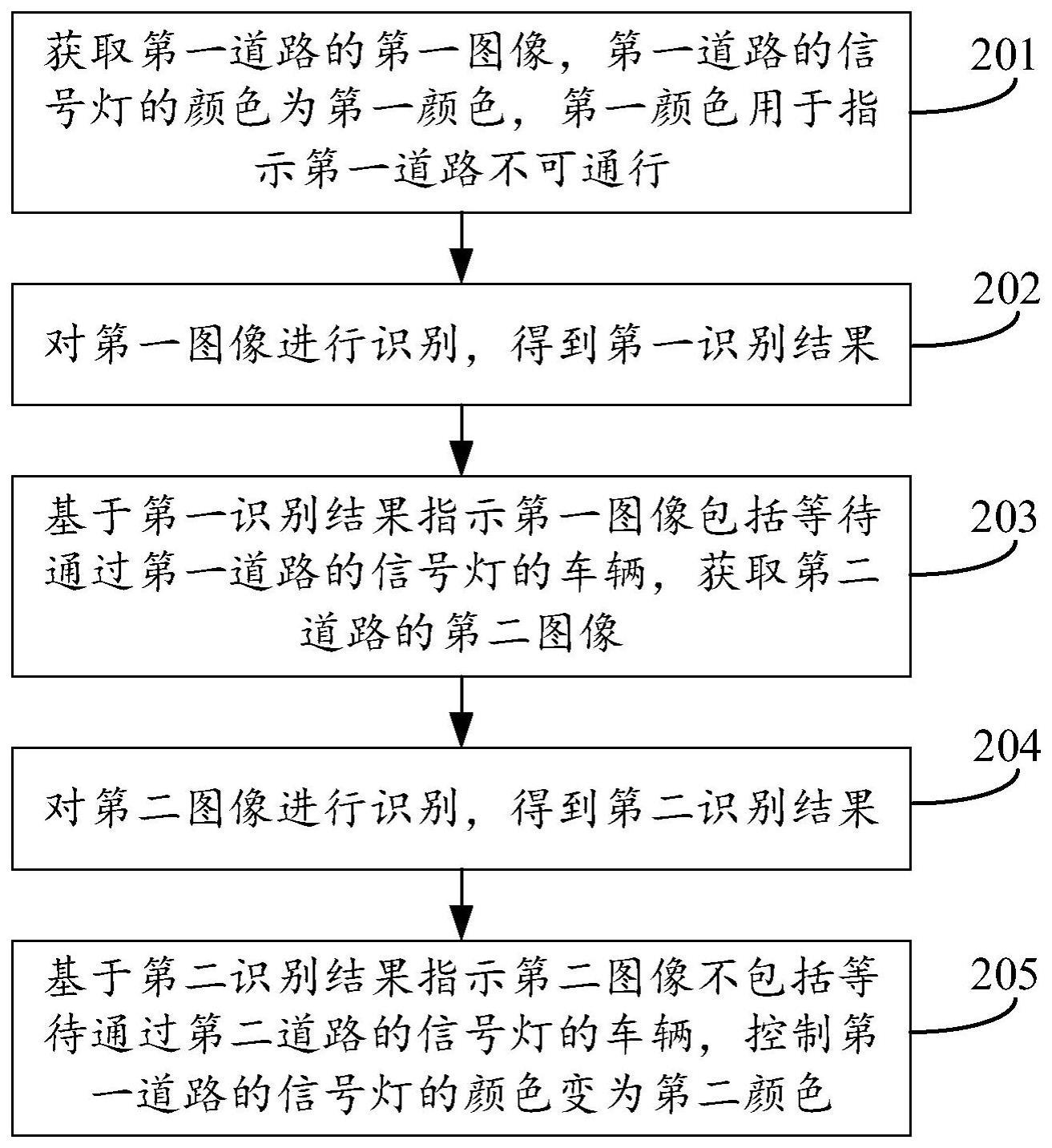
3、获取第一道路的第一图像,所述第一道路的信号灯的颜色为第一颜色,所述第一颜色用于指示所述第一道路不可通行;
4、对所述第一图像进行识别,得到第一识别结果;
5、基于所述第一识别结果指示所述第一图像包括等待通过所述第一道路的信号灯的车辆,获取第二道路的第二图像,所述第二道路和所述第一道路为交叉道路,所述第二道路的信号灯的颜色为第二颜色,所述第二颜色用于指示所述第二道路可通行;
6、对所述第二图像进行识别,得到第二识别结果;
7、基于所述第二识别结果指示所述第二图像不包括等待通过所述第二道路的信号灯的车辆,控制所述第一道路的信号灯的颜色变为所述第二颜色。
8、在一种可能的实现方式中,所述对所述第一图像进行识别,得到第一识别结果,包括:
9、对所述第一图像进行识别,得到第一内容,所述第一内容包括所述第一图像中包括的物体的物体信息;
10、基于所述第一内容指示所述第一图像中包括第一车辆,确定所述第一车辆到第一参考线的实际距离,所述第一参考线为所述第一道路的信号灯的停止线;
11、基于所述第一车辆到所述第一参考线的实际距离小于第一阈值,确定所述第一识别结果指示所述第一图像包括等待通过所述第一道路的信号灯的车辆。
12、在一种可能的实现方式中,所述确定所述第一车辆到第一参考线的实际距离,包括:
13、获取所述第一图像的第一比例,所述第一比例为拍摄所述第一图像的第一摄像装置的像素比例;
14、确定在所述第一图像中所述第一车辆到所述第一参考线的图像距离;
15、根据所述第一比例,对所述图像距离进行转换,得到所述第一车辆到所述第一参考线的实际距离。
16、在一种可能的实现方式中,所述第一车辆到第一参考线的实际距离为所述第一车辆的车头到第一参考线的实际距离;
17、或者,所述第一车辆到第一参考线的实际距离为所述第一车辆的车尾到第一参考线的实际距离。
18、在一种可能的实现方式中,所述对所述第二图像进行识别,得到第二识别结果,包括:
19、在所述第二图像中确定目标区域,所述目标区域基于第二参考线确定,所述第二参考线为所述第二道路的信号灯的停止线;
20、对所述目标区域进行识别,得到第二内容,所述第二内容包括所述目标区域包括的物体的物体信息;
21、基于所述第二内容指示所述目标区域内不包括车辆,确定所述第二识别结果指示所述第二图像中不包括等待通过所述第二道路的信号灯的车辆。
22、在一种可能的实现方式中,所述在所述第二图像中确定目标区域,包括:
23、获取所述第二图像的第二比例,所述第二比例为拍摄所述第二图像的第二摄像装置的像素比例;
24、根据所述第二比例和第二阈值,确定目标距离;
25、将与所述第二参考线之间的距离为所述目标距离,且未通过所述第二参考线的区域作为所述目标区域。
26、在一种可能的实现方式中,所述方法还包括:
27、基于所述第二识别结果指示所述第二图像不包括等待通过所述第二道路的信号灯的车辆,控制所述第二道路的信号灯的颜色变为所述第一颜色。
28、另一方面,本技术实施例提供了一种信号灯的控制装置,所述装置包括:
29、获取模块,用于获取第一道路的第一图像,所述第一道路的信号灯的颜色为第一颜色,所述第一颜色用于指示所述第一道路不可通行;
30、识别模块,用于对所述第一图像进行识别,得到第一识别结果;
31、所述获取模块,还用于基于所述第一识别结果指示所述第一图像包括等待通过所述第一道路的信号灯的车辆,获取第二道路的第二图像,所述第二道路和所述第一道路为交叉道路,所述第二道路的信号灯的颜色为第二颜色,所述第二颜色用于指示所述第二道路可通行;
32、所述识别模块,还用于对所述第二图像进行识别,得到第二识别结果;
33、控制模块,用于基于所述第二识别结果指示所述第二图像不包括等待通过所述第二道路的信号灯的车辆,控制所述第一道路的信号灯的颜色变为所述第二颜色。
34、在一种可能的实现方式中,所述识别模块,用于对所述第一图像进行识别,得到第一内容,所述第一内容包括所述第一图像中包括的物体的物体信息;基于所述第一内容指示所述第一图像中包括第一车辆,确定所述第一车辆到第一参考线的实际距离,所述第一参考线为所述第一道路的信号灯的停止线;基于所述第一车辆到所述第一参考线的实际距离小于第一阈值,确定所述第一识别结果指示所述第一图像包括等待通过所述第一道路的信号灯的车辆。
35、在一种可能的实现方式中,所述识别模块,用于获取所述第一图像的第一比例,所述第一比例为拍摄所述第一图像的第一摄像装置的像素比例;确定在所述第一图像中所述第一车辆到所述第一参考线的图像距离;根据所述第一比例,对所述图像距离进行转换,得到所述第一车辆到所述第一参考线的实际距离。
36、在一种可能的实现方式中,所述第一车辆到第一参考线的实际距离为所述第一车辆的车头到第一参考线的实际距离;
37、或者,所述第一车辆到第一参考线的实际距离为所述第一车辆的车尾到第一参考线的实际距离。
38、在一种可能的实现方式中,所述识别模块,用于在所述第二图像中确定目标区域,所述目标区域基于第二参考线确定,所述第二参考线为所述第二道路的信号灯的停止线;对所述目标区域进行识别,得到第二内容,所述第二内容包括所述目标区域包括的物体的物体信息;基于所述第二内容指示所述目标区域内不包括车辆,确定所述第二识别结果指示所述第二图像中不包括等待通过所述第二道路的信号灯的车辆。
39、在一种可能的实现方式中,所述识别模块,用于获取所述第二图像的第二比例,所述第二比例为拍摄所述第二图像的第二摄像装置的像素比例;根据所述第二比例和第二阈值,确定目标距离;将与所述第二参考线之间的距离为所述目标距离,且未通过所述第二参考线的区域作为所述目标区域。
40、在一种可能的实现方式中,所述控制模块,还用于基于所述第二识别结果指示所述第二图像不包括等待通过所述第二道路的信号灯的车辆,控制所述第二道路的信号灯的颜色变为所述第一颜色。
41、另一方面,本技术实施例提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以使计算机设备实现上述任一所述的信号灯的控制方法。
42、另一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以使计算机设备实现上述任一所述的信号灯的控制方法。
43、另一方面,还提供了一种计算机程序或计算机程序产品,所述计算机程序或计算机程序产品中存储有至少一条计算机指令,所述至少一条计算机指令由处理器加载并执行,以使计算机设备实现上述任一种信号灯的控制方法。
44、本技术实施例提供的技术方案至少带来如下有益效果:
45、本技术实施例提供的技术方案在第一道路存在等待通过第一道路的信号灯的车辆,但第一道路的信号灯的颜色为第一颜色,而第二道路不存在等待通过第二道路的信号灯的车辆,但第二道路的信号灯的颜色为第二颜色时,通过对第一道路的信号灯的颜色进行调整,以使第一道路的车辆能够快速通行,进而减少第一道路的车辆的通行时长,提高第一道路的车辆的通行效率。
- 还没有人留言评论。精彩留言会获得点赞!