一种基于区域集群的路侧公共泊车位引导方法及系统与流程
本发明属于智能交通的车路协同辅助驾驶,尤其涉及基于车载数据与路侧感知融合设备数据的路侧公共停车区域最优泊位引导的方法及系统。
背景技术:
1、随着我国居民家庭用车保有率的逐年上涨,私家车通勤已成为了大众的一种重要的交通出行方式。但私家车给人们带来便利的同时,其所引发的停车难的问题也愈发明显。
2、一方面,尽管城市中布设有按时计价的停车区域以及配有越来越完善的停车位指示系统,但是仍然有很多车主依然选择较为经济的公共停车区域进行泊车。
3、另一方面,虽然在城市中也布设有大量免费的公共停车区域,然而目前公共停车区域并没有一种行之有效的宏观引导系统,从而导致公共停车区域集群无法进行均衡的车流负载。尤其在上下班高峰期,即停车位和车流量都表现出明显的潮汐特性情况下,会出现部分公共停车场区域空置,而另外一些区域溢出的情况。
4、或者出现车主由于上下班时间紧迫性,在发现目标停车区域溢出的情况下,由于视距和信息所限,无法耗费大量时间遍历所有的停车场区域寻找最优区域,只能在附近继续随机搜寻车位而无法停到最合适泊位的情况。
5、近年来,伴随着边缘计算、融合感知、v2x等车路协同技术的不断发展,车辆行驶过程中的一些动态指标,和路侧交通标志信息的感知和获取技术已经逐渐成熟。如何结合这些最新技术设计一种有效的公共车位引导方法及系统,从而减少城市交通的碳排放,以及缩短车主的寻车位时间,已成为一个重要的交通优化治理课题。
技术实现思路
1、本发明基于车路协同的技术,提出了一种基于区域集群的路侧公共泊车位引导法。鉴于公共停车区域的整体占用情况具有一定的周期规律性,且考虑到其耗费较低的计算资源而带来的实时性优势,本发明以自定义范围的公共停车子区域为运算单位,通过统计其子区域历史空置数目,并考虑同时锚定该区域的其他车辆实时情况,以及宏观考虑整个停车区集群的负载情况,通过综合计算后为目标为公共停车位区域的车辆停泊提供最优化的引导支持。
2、本发明提供了一种基于区域集群的路侧公共泊车位引导法,其计算步骤包括:
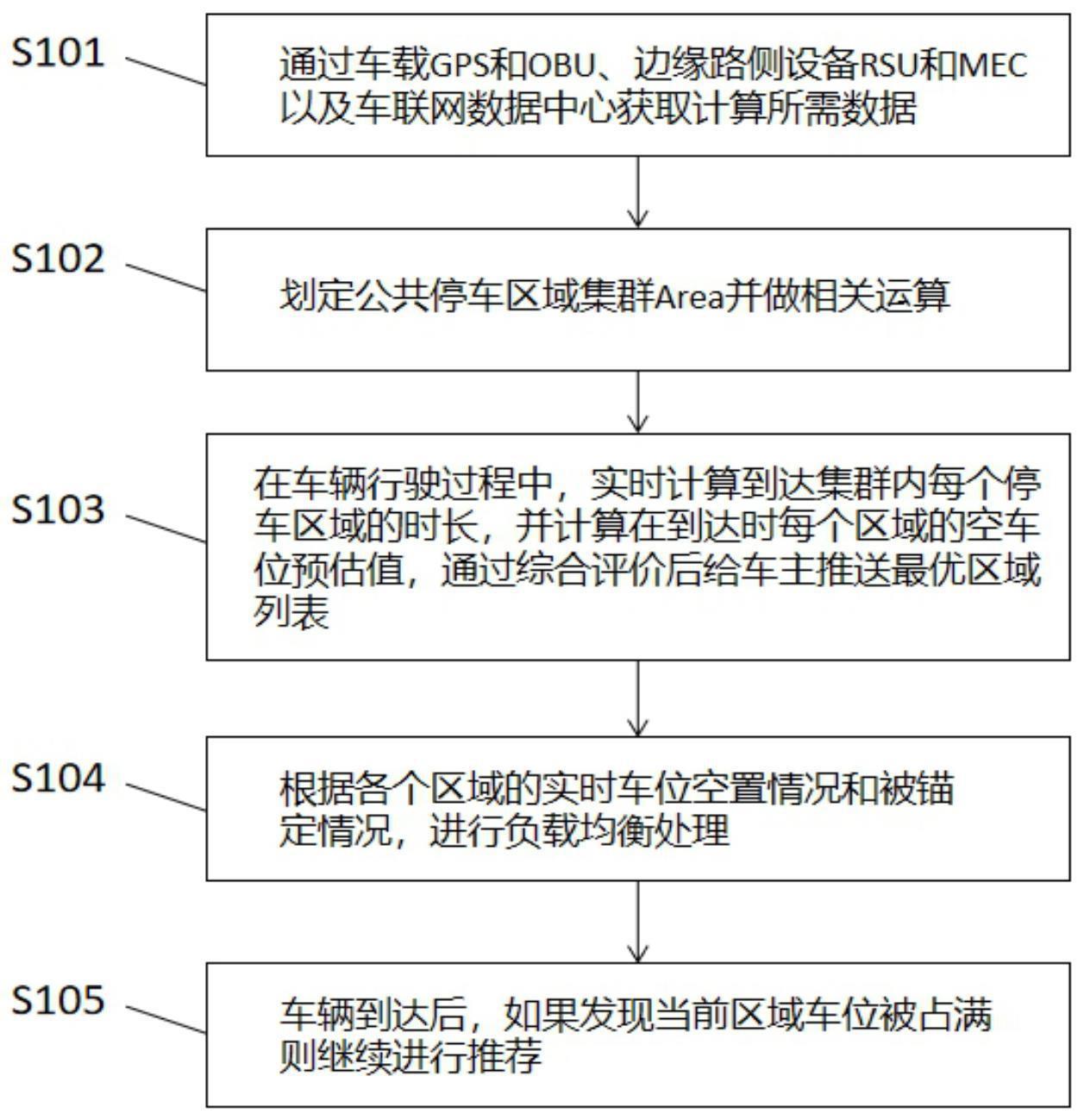
3、步骤s1、通过车载gps和obu、边缘路侧设备rsu和mec以及车联网数据中心获取计算所需元数据。
4、优选的,所述元数据包含本车实时动态数据。具体的,包含车辆的始发地坐标、目的地坐标,本车的行驶速度。
5、优选的,所述元数据包含路网数据和边缘融合感知数据,包含目的地附近的停车区域识别,以及始发地到目的地范围的高精地图信息。
6、优选的,所述元数据包含车辆历史行驶数据,具体的,包含车辆历史的从始发地到目的地运行时长数据。
7、优选的,所述元数据包含停车区域停车位历史数据,具体的,包含该区域在历史指定阶段的同一周期日的车位数变化数据。
8、步骤s2、划定公共停车区域集群area并做相关运算。
9、优选的,所述运算包含通过获取指定的行车目的地中心坐标,以及默认且可设置的超参数搜索半径r,划定该目的地周围的公共停车区域集群,并给予设置编号数组(a1,a2,a3...an)。其中数组中每个元素为停车子区域编号。其中每个停车子区域的范围定义为路段两端点路口中间的公共车位队列,其特点之一为单向排列,即在道路的双向路侧均有一排公共停车区域。
10、优选的,所述运算包含计算集群a中所有停车子区域的几何中心位置与目的地距离的相对距离数组(d1,d2,d3...dn)。
11、优选的,所述运算包含统计目的地公共区域集群各子区域历史同期的停车位空置数据表。
12、优选的,所述运算包含计算每个停车子区域停车数量的期望值。
13、优选的,所述计算每个停车子区域停车数量的期望值包含计算指定子区域ai的历史同期单日的该停车子区域的空置车辆数,为了减少计算量提高系统运行速度,以5分钟为计算单位,统计特定停车子区域的空置数目表,考虑到停车子区域中的车位数的实时变化特性,为简化计算量以减轻边缘设备的计算资源占用,以30s的时间间隔进行数据采样,对采样的10个数据求取算术平均值,然后统计汇总后存入数据库中。
14、优选的,所述计算每个停车子区域停车数量的期望值还包含对异常数据进行平滑处理,以防止区域周边突发事件导致的空置数目的异常波动带来的影响。具体的,对历史数据的最大值和最小值进行重新赋值,即其值设置为相邻周期的空置数的平均值。
15、优选的,所述计算每个停车子区域停车数量的期望值还包含,由于停车子区域周围的车流量在短天数内有一定的稳定性,而对于长天数内则有更大的不确定性,所以本发明给予与当前日期更加临近的历史日期更大的置信度,在此给往期数据以置信度折扣率或选择概率pi,其中pi存在如下规定:
16、pi∈(0,1];且p1>pi≥pn,即单调非递增;
17、同时,
18、优选的,在此为简便计算,本发明取特定pi序列如下,即可满足上述预设要求。
19、
20、其中最后两项取相同值。
21、然后针对每个停车子区域,以该pi值对往期空置数量加权求该子区域的空置车位期望数:
22、
23、优选的,所述计算每个停车子区域停车数量的期望值还包含,汇总每个子区域在指定时间段的期望停车位数目,其值取整后汇总为一个二维的表格数组,其元素值为ei,j,即为第i个子区域的第j个时间段的空置数目期望。
24、步骤s3、在车辆行驶过程中,实时计算到达集群内每个停车子区域的时长,并计算在到达时每个子区域的空车位期望值,通过综合评价后得到按综合评价值高低排序的子区域列表,并将最优区域定为该车锚定区域。
25、优选的,所述步骤s3具体包含通过路网数据及该车的平均车速,并结合dijkstra最短路径算法计算出发地到目的子区域的最短行驶时长(t1,t2,t3...tn)
26、优选的,所述步骤s3具体还包含计算区域群中各子区域到达最终目的地的步行耗时,
27、优选的,所述步骤s3具体还包含对检索范围内的停车子区域ai进行推荐。推荐依据为ai子区域的综合评价值列表list-v,其中取该值最大的子区域作为本车的首选锚定子区域,其价值公式为:
28、
29、其中,
30、ti,j-std,即为第i个停车子区域为目标的总行驶时长的归一化值。其中,ti=ti+t'i,t为从始发地到目的停车子区域ai的最短行驶时长,t’为从目的停车子区域ai到目的地的步行时长。tmin、tmax分别为历史最小耗时和历史最大耗时。
31、即为历史上第i个停车子区域第j个时间间隔停车期望值的归一化值,gi为ai子区域的总车位数目。
32、即为基于当前实时空置数的归一化预估值值,其中ni为当前时刻该车位的空置数,gi为ai子区域的总车位数目。
33、k1、k2、k3为每项的权重,其值为变量,系统根据时间和情况变化会对其值进行调整,权重满足条件:
34、k1为车辆从出发地经过目标停车子区域ai到达目的地的行驶时长的权重,其范围为(0,100%),由系统进行自动调整。
35、k2为预计该车到达停车子区域后,该停车子区域空置车位的期望数的权重。其范围为(0,100%)。k2值随着距离目的子区域的距离越来越近,其值越来越小直到变为0%,由系统进行自动调整。
36、k3为ci的权重,其值随着距离目标子区域的越来越近,其值越来越大,直到变为1-k1,由系统进行自动调整。
37、步骤s4、根据各个子区域的实时车位空置情况和被锚定情况,进行负载均衡处理。
38、优选的,所述步骤s4具体处理过程包含定义区域b为均衡区域群,定义其中每个停车子区域bi的负载率:
39、
40、其中oi为子区域bi当前已占用的车位数在固定时间间隔5分钟内的算数平均值,gi为子区域bi所有的车位数,即包含已占用的和未占用的车位。
41、优选的,所述步骤s4具体处理过程还包含以定义区域群b为范围,计算所有子区域的负载率(l1,l2,...ln)。
42、优选的,所述步骤s4具体处理过程还包含计算b区域群内的负载率标准差δ,当标准差大于指定阈值δthrd时触发负载均衡处理逻辑。标准差计算方法如下:
43、
44、其中,xi为第i个子区域的停车位数目。
45、μ为区域群的空置停车位均值即:
46、
47、优选的,所述步骤s4具体处理过程还包含若子区域bi的负载率过高,则对锚定子区域为bi的车辆列表list-car-bi:(car1,car2,...carn)的首选推荐子区域进行调整,具体的,对list-car-bi中车辆的v值进行排序,选取排名靠后的20%组成待调度列表list-car-bi-reanchor。
48、优选的,所述步骤s4具体处理过程还包含将list-car-bi-reanchor中的所有车辆所对应的综合价值列表list-v中的第二名所对应的子区域更新为该车的最新的锚定子区域。
49、步骤s5、车辆到达后,如果发现当前子区域车位被占满则继续进行推荐。
50、优选的,所述步骤s5具体处理过程包含立刻推荐距离本车位置最近的其他空置子区域。
51、优选的,所述步骤s5具体处理过程还包含:如果当前检索区域群所有车位数已满,则结合步骤s2中统计的空置期望数据表,预判下一个时间间隔内停车位期望数最多的停车子区域ai,并将等待时长一起推送给驾驶者供其参考。
52、优选的,所述步骤s5具体处理过程还包含:如果当前检索区域群所有车位数已满,且驾驶者则根据预设步长rstp扩大检索区域面积,直到找到停车位入库后停止计算。优选的,rstp设为500m。
53、相应的,本发明还提供了一种基于路侧公共停车区域停位泊车引导提示系统,用于实现所述的基于车路协同的公共停车位推荐方法。
54、具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
- 还没有人留言评论。精彩留言会获得点赞!