一种基于智慧园区的车辆违规抓拍方法与流程
本发明涉及智慧园区智能管理,尤其涉及一种基于智慧园区的车辆违规抓拍方法。
背景技术:
1、智慧园区是指融合新一代信息与通信技术,具备迅捷信息采集、高速信息传输、高度集中计算、智能事务处理和无所不在的服务提供能力的智慧化园区。
2、目前基于智慧园区的智能化操作很多,如智能抓拍、车牌识别、人脸识别、火灾自动报警等,其中以车辆违规抓拍最为典型。
3、目前基于智慧园区的车辆违规抓拍方法,主要依赖于智慧园区的监控设备,即通过智慧园区的监控设备内嵌的深度学习检测算法,先识别出智慧园区的车辆,并通过卷积层、池化层等深度学习操作,识别车辆的位置或行驶速度,进而判断车辆在智慧园区内的行驶、停车等是否违规。
4、基于监控设备内嵌的深度学习算法虽然可是车辆违规抓拍,但共识的,深度学习算法的运行需要消耗大量的计算资源,当智慧园区内的车辆数量增多时,依赖监控设备的深度学习算法受限于监控设备的计算能力,无法及时的实现对车辆违规的判定,从而造成判定不及时或漏判定的现象发生。
技术实现思路
1、本发明提供一种基于智慧园区的车辆违规抓拍方法其主要目的在于克服传统方法依赖深度学习算法实现智慧园区的车辆违规判定,会造成大量计算资源浪费的问题。
2、为实现上述目的,本发明提供的一种基于智慧园区的车辆违规抓拍方法,包括:
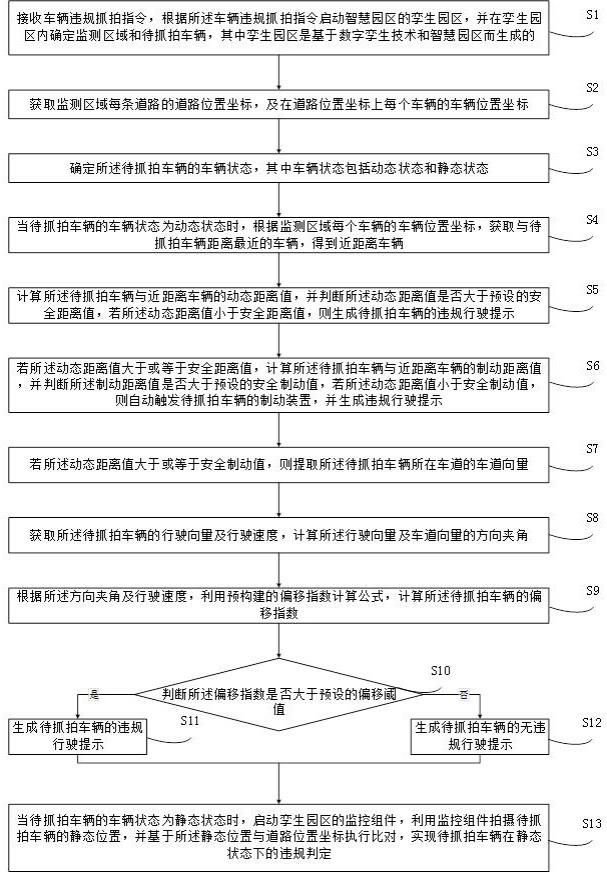
3、接收车辆违规抓拍指令,根据所述车辆违规抓拍指令启动智慧园区的孪生园区,并在孪生园区内确定监测区域和待抓拍车辆,其中孪生园区是基于数字孪生技术和智慧园区而生成的;
4、获取监测区域每条道路的道路位置坐标,及在道路位置坐标上每个车辆的车辆位置坐标;
5、确定所述待抓拍车辆的车辆状态,其中车辆状态包括动态状态和静态状态;
6、当待抓拍车辆的车辆状态为动态状态时,根据监测区域每个车辆的车辆位置坐标,获取与待抓拍车辆距离最近的车辆,得到近距离车辆;
7、计算所述待抓拍车辆与近距离车辆的动态距离值,并判断所述动态距离值是否大于预设的安全距离值,若所述动态距离值小于安全距离值,则生成待抓拍车辆的违规行驶提示;
8、若所述动态距离值大于或等于安全距离值,计算所述待抓拍车辆与近距离车辆的制动距离值,并判断所述制动距离值是否大于预设的安全制动值,若所述制动距离值小于安全制动值,则自动触发待抓拍车辆的制动装置,并生成违规行驶提示;
9、若所述制动距离值大于或等于安全制动值,则提取所述待抓拍车辆所在车道的车道向量;
10、获取所述待抓拍车辆的行驶向量及行驶速度,计算所述行驶向量及车道向量的方向夹角;
11、根据所述方向夹角及行驶速度,利用预构建的偏移指数计算公式,计算所述待抓拍车辆的偏移指数,其中所述偏移指数计算公式如下所示:
12、;
13、其中,表示第i辆待抓拍车辆的偏移指数,表示第i辆待抓拍车辆的行驶速度,表示行驶时长,表示行驶向量及车道向量的方向夹角;
14、判断所述偏移指数是否大于预设的偏移阈值;
15、若所述偏移指数大于所述偏移阈值,则生成待抓拍车辆的违规行驶提示;
16、若所述偏移指数不大于所述偏移阈值,则生成待抓拍车辆的无违规行驶提示;
17、当待抓拍车辆的车辆状态为静态状态时,启动孪生园区的监控组件,利用监控组件拍摄待抓拍车辆的静态位置,并基于所述静态位置与道路位置坐标执行比对,实现待抓拍车辆在静态状态下的违规判定。
18、可选地,所述根据所述车辆违规抓拍指令启动智慧园区的孪生园区,并在孪生园区内确定监测区域和待抓拍车辆,包括:
19、解析所述车辆违规抓拍指令,其中车辆违规抓拍指令中包括违规监测区域,其中监测区域小于或等于智慧园区;
20、从车辆违规抓拍指令中获取所述监测区域;
21、启动所述智慧园区的孪生园区,其中孪生园区是基于数字孪生技术和智慧园区而生成的;
22、基于孪生园区划分出与监测区域对应的监测园区,从所述监测园区内获取所有的待抓拍车辆,其中获取方法包括:
23、发起车辆响应指令,并将车辆响应指令发送至监测园区内所有的车辆传感系统内,其中监测园区内每辆车均安装车辆传感系统;
24、接收每辆车的车辆传感系统根据车辆响应指令所回传的回传响应指令,其中回传响应指令中包括每辆车的车辆外观及车牌号;
25、根据每辆车的车辆外观及车牌号,选择得到待抓拍车辆。
26、可选地,所述车辆传感系统包括安装在车辆的摄像头、毫米波雷达、激光雷达、位置定位器、车辆行驶控制系统及车辆运行系统监测器。
27、可选地,所述获取监测区域每条道路的道路位置坐标,及在道路位置坐标上每个车辆的车辆位置坐标,包括:
28、从所述监测区域对应的监测园区中获取监测区域内所有的园区组件,其中园区组件包括植被组件、电力器材组件、监控组件及道路组件,且道路组件包括马路组件、标识组件及引导线组件;
29、从所有园区组件中筛选得到道路组件,并获取每个道路组件的位置坐标,其中位置坐标包括马路位置、标识位置及引导线位置;
30、汇总监测区域每个道路组件的位置坐标,得到道路位置坐标集;
31、发起车辆位置定位指令,并将车辆响应指令发送至监测园区内每辆车的位置定位器;
32、接收每辆车的位置定位器根据车辆位置定位指令所回传的车辆位置响应指令,其中车辆位置响应指令包括在道路位置坐标上,每辆车的车辆位置坐标;
33、从车辆位置响应指令中提取得到每个车辆的车辆位置坐标。
34、可选地,所述确定所述待抓拍车辆的车辆状态,包括:
35、获取待抓拍车辆的车辆传感系统;
36、从车辆传感系统中索引得到待抓拍车辆的车辆运行系统监测器,其中车辆运行系统监测器包括待抓拍车辆的当前行驶速度和多组历史行驶速度,且历史行驶速度和当前行驶速度的时间间隔不超过3秒;
37、判断当前行驶速度和多组历史行驶速度是否均为0,若当前行驶速度和多组历史行驶速度均为0,则确定待抓拍车辆的车辆状态为静态状态;
38、若当前行驶速度和多组历史行驶速度不均为0,则确定待抓拍车辆的车辆状态为动态状态。
39、可选地,所述计算所述待抓拍车辆与近距离车辆的动态距离值,包括:
40、根据下式计算得到动态距离值:
41、;
42、其中,表示待抓拍车辆与近距离车辆的动态距离值,表示待抓拍车辆与近距离车辆的实际距离值,为待抓拍车辆与近距离车辆的相对速度,表示预先设定的待抓拍车辆与近距离车辆的安全时间。
43、可选地,所述计算所述待抓拍车辆与近距离车辆的制动距离值,包括:
44、根据下式计算得到制动距离值:
45、;
46、其中,表示待抓拍车辆与近距离车辆的制动距离值,为制动待抓拍车辆的制动时间,为通过待抓拍车辆的车辆传感系统实现待抓拍车辆制动的延迟时间,为待抓拍车辆的最大减速度,为近距离车辆的最大减速度,为待抓拍车辆的当前行驶速度,为近距离车辆的当前行驶速度。
47、可选地,所述自动触发待抓拍车辆的制动装置,包括:
48、获取待抓拍车辆的车辆传感系统的控制权,其中控制权包括对待抓拍车辆的车辆行驶控制系统的控制;
49、利用车辆行驶控制系统生成减速指令,并将减速指令传导至待抓拍车辆,从而触发待抓拍车辆的制动装置,其中制动装置包括刹车装置,实现待抓拍车辆的自动制动。
50、可选地,所述利用监控组件拍摄待抓拍车辆的静态位置,包括:
51、根据所述待抓拍车辆的车辆位置坐标,确定与所述待抓拍车辆距离值小于指定距离的一个或多个监控组件,其中监控组件是监控设备的数字孪生;
52、启动与所述监控组件对应的监控设备,拍摄所述待抓拍车辆的静态状态,得到一个或多个视角的车辆静态图;
53、将一个或多个视角的车辆静态图发送至孪生园区的管理人员的同时,并根据车辆位置坐标,标定出待抓拍车辆在每个车辆静态图中位置,得到待抓拍车辆的静态位置。
54、可选地,所述将一个或多个视角的车辆静态图发送至孪生园区的管理人员,之后还包括:
55、接收管理人员根据车辆静态图所发起的是否违停判定;
56、若管理人员所发起的是已违停判定,则直接生成待抓拍车辆在静态状态下的违停判定提示;
57、若管理人员所发起的是未违停判定,则进一步通过静态位置与道路位置坐标执行比对。
58、本发明实施例为解决背景技术所述问题,先根据车辆违规抓拍指令启动智慧园区的孪生园区,并在孪生园区内确定监测区域和待抓拍车辆,可见本发明实施例的应用场景主要依赖数字孪生技术,即利用数字孪生技术生成与智慧园区对应的孪生园区以后,获取监测区域每条道路的道路位置坐标,及在道路位置坐标上每个车辆的车辆位置坐标,由于依赖于数字孪生技术,可及时高效的获取出车辆的车辆位置坐标,重点的,本发明实施例先确定待抓拍车辆的车辆状态,其中车辆状态包括动态状态和静态状态,可见动态状态和静态状态下,对于待抓拍车辆的违规判定是不一样的,其中当待抓拍车辆的车辆状态为动态状态时,根据监测区域每个车辆的车辆位置坐标,获取与待抓拍车辆距离最近的车辆,得到近距离车辆,由于动态状态下,极容易发生车辆速度过高而产生交通风险,传统的方法仅仅是通过智慧园区内的监控设备实现车速预测,当预测的车速大于设定的最大速度时,则测定车辆违规,但由于并未考虑与待抓拍车辆附近的车辆,因此智能程度有待提高,且过于频繁使用监控设备内的深度学习算法检测车辆并实现车速预测,也会造成大量的计算资源消耗,而本发明实施例巧妙的基于动态距离值和制动距离值实现对待抓拍车辆的违规判定,减少了智慧园区的计算压力,在完成对车速的监测后,进一步地,需要对行驶的偏移程度进行确定,通过偏移指数的计算,完成对待抓拍车辆的偏移程度的监测。因此本发明提出的基于智慧园区的车辆违规抓拍方法,可以克服传统方法依赖深度学习算法实现智慧园区的车辆违规判定,会造成大量计算资源浪费的问题。
- 还没有人留言评论。精彩留言会获得点赞!