一种基于边缘计算的车路感知设备和方法与流程
本发明提出了一种基于边缘计算的车路感知设备和方法,属于智慧交通。
背景技术:
1、传统的智能交通系统采用视频、雷达等检测器检测道路交通流量、车速、排队长度等交通参数,并且结合gnss浮动定位系统检测道路交通状态。近年来又有互联网公司结合移动互联网手机定位大数据分析交通状态,进而建立了所谓“交通大脑”,对区域交通信号灯配时方案进行整体优化,实现了不错的效果。
2、近来被广泛关注的自动驾驶技术利用车载激光雷达、毫米波雷达、超声波雷达、视频摄像机等传感器感知汽车周边环境,通过车载边缘计算实现对汽车周边的环境进行识别,进而实现对车辆的自动驾驶,也取得了很大进展。
3、从技术演化角度来看,车路协同可以从本质上解决单车智能驾驶所遇到的技术瓶颈。一直以来,视野局限和视效局限是影响自动驾驶安全性的主要原因。智能汽车感知硬件系统,无论是摄像头还是雷达,都是基于生物感官的产物,搭载在车端就必然会有“盲区”。基于视觉产生的信息判断,即使芯片再智能也无法计算看不见的信息。
4、但道路交通是异常复杂的巨系统,道路交通环境瞬息万变。仅仅凭传统的交通感知手段和自动驾驶汽车安装的有限传感器是无法满足完全、快速掌握动态交通环境的需求的。而且由于车载传感器要求体积小,并且价格昂贵,无法普及的广大出行者的汽车上。车路协同技术应运而生。
技术实现思路
1、本发明提供了一种基于边缘计算的车路协同感知设备和方法,用以解决车辆行驶过程中交通事故频发的问题:
2、一种基于边缘计算的车路协同感知方法,所述方法包括:
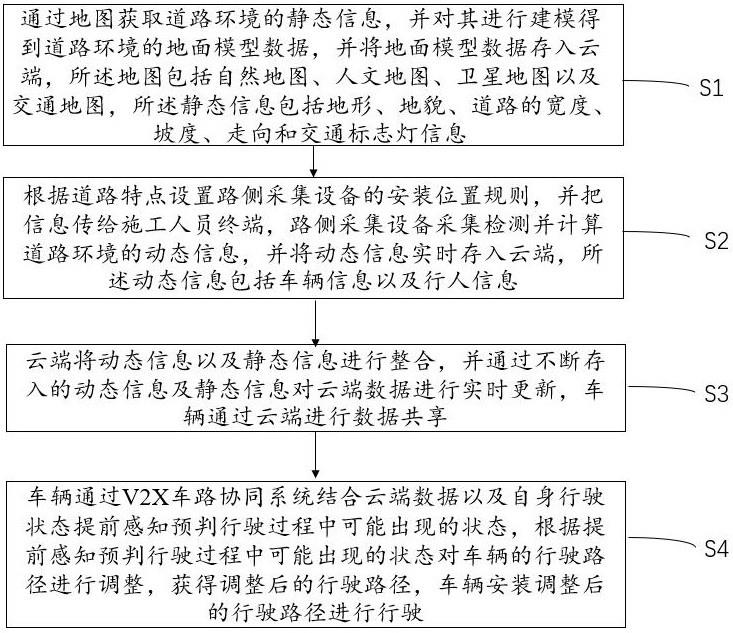
3、s1:通过地图获取道路环境的静态信息,并对其进行建模得到道路环境的地面模型数据,并将地面模型数据存入云端,所述地图包括自然地图、人文地图、卫星地图以及交通地图,所述静态信息包括地形、地貌、道路的宽度、坡度、走向和交通标志灯信息;
4、s2:根据道路特点设置路侧采集设备的安装位置规则,并把信息传给施工人员终端,路侧采集设备采集检测并计算道路环境的动态信息,并将动态信息实时存入云端,所述动态信息包括车辆信息以及行人信息;
5、s3:云端将动态信息以及静态信息进行整合,并通过不断存入的动态信息及静态信息对云端数据进行实时更新,车辆通过云端进行数据共享;
6、s4:车辆通过v2x车路协同系统结合云端数据以及自身行驶状态提前感知预判行驶过程中可能出现的状态,根据提前感知预判行驶过程中可能出现的状态对车辆的行驶路径进行调整,获得调整后的行驶路径,车辆安装调整后的行驶路径进行行驶。
7、进一步的,通过地图获取道路环境的静态信息,并对其进行建模得到道路环境的地面模型数据,并将地面模型数据存入云端,所述地图包括自然地图、人文地图、卫星地图以及交通地图,所述静态信息包括地形、地貌、道路的宽度、坡度、走向和交通标志灯信息,包括:
8、s11:对想要实现车路协同这个目标的条件进行分析,确定实现这个目标需要使用到的静态信息;
9、s12:对所述地图进行分析,确定静态信息的类型以及参数数据;
10、s13:通过静态信息的类型以及参数数据对所述地图进行建模操作,得到道路环境的地面模型数据;
11、s14:将道路环境的地面模型数据存入云端,云端通过接入市政建设部门的官方网站以及中国地理空间数据云网站,并设置训练模型,让训练模型实时获取更新数据对地面模型数据进行实时更新。
12、进一步的,根据道路特点设置路侧采集设备的安装位置规则,并把信息传给施工人员终端,路侧采集设备采集检测并计算道路环境的动态信息,并将动态信息实时存入云端,所述动态信息包括车辆信息以及行人信息,包括:
13、s21:通过地图获取的道路环境的静态信息数据,根据道路特点设置路侧采集设备的安装位置规则,并记录安装路侧信息采集设备位置的经纬度坐标;所述安装位置规则包括:针对城市道路,在有交通信号的路口根据原有设备进行感知;在路侧信息采集设备不能完全覆盖的路口,通过对角线安装交叉感知进行补盲;在主要干道将路侧信息采集设备安装在路旁路灯上,路侧采集设备两两之间间隔一个路灯;在环形路口,将车辆环绕区域做圆,以进口为起点,每隔90度安装一个路侧信息采集设备;针对高速、国道和省道,每隔197米设置一个路侧信息采集装置;针对隧道进出口有明暗交接的情况,通过在进出口设置路侧采集装置;在急弯、匝道的进出口设置路侧信息采集设备;
14、s22:车载信息监控设备以及路侧信息采集设备同时采集、检测并计算道路环境的动态信息,并通过v2x车路协同系统实现车与车、车与路侧信息采集设备以及路侧信息采集设备以及路侧信息采集设备与路侧信息采集设备之间的数据共享与通信;
15、s23:将车载信息监控设备以及路侧信息采集设备采集、检测并计算得到的动态信息以及路侧信息采集设备的经纬度坐标通过v2x车路协同系统实时存入云端;
16、s24:通过v2x车路协同系统结合云端获取具体信息。
17、进一步的,云端将动态信息以及静态信息进行整合,并通过不断存入的动态信息及静态信息对云端数据进行实时更新,车辆通过云端进行数据共享;包括:
18、s31:v2x车路协同系统通过路侧信息采集设备的经纬度坐标以及车辆自身携带的gps定位器确定当前动态信息采集的具体位置;
19、s32:通过所述动态信息采集的具体位置确定其在道路环境的地面模型中对应的静态位置区间;
20、s33:将动态信息采集的位置与地面模型中对应的静态位置进行整合匹配,得到动静结合的道路环境信息;
21、s34:云端通过v2x车路协同系统不断存入的道路环境信息对云端数据进行实时更新。
22、进一步的,车辆通过v2x车路协同系统结合云端数据以及自身行驶状态提前感知预判行驶过程中可能出现的状态,根据提前感知预判行驶过程中可能出现的状态对车辆的行驶路径进行调整,获得调整后的行驶路径,车辆安装调整后的行驶路径进行行驶,包括:
23、s41:车辆通过v2x车路协同系统实时获取当前区域的交通信息,所述信息包括实时路况以及动态信息;
24、s42:云端通过对v2x车路协同系统不断存入的道路环境信息进行分析计算,预判车量行驶过程中可能出现的状况,并将可能出现的状况系信息反馈给车辆;
25、s43:车辆通过云端反馈的状况信息对行驶状态进行调整并提取规划好行驶路径。
26、一种基于边缘计算的车路协同感知设备,所述设备包括:
27、信息获取模块:通过地图获取道路环境的静态信息,并对其进行建模得到道路环境的地面模型数据,并将地面模型数据存入云端,所述地图包括自然地图、人文地图、卫星地图以及交通地图,所述静态信息包括地形、地貌、道路的宽度、坡度、走向和交通标志灯信息;
28、设备安装模块:根据道路特点设置路侧采集设备的安装位置规则,并把信息传给施工人员终端,路侧采集设备采集检测并计算道路环境的动态信息,并将动态信息实时存入云端,所述动态信息包括车辆信息以及行人信息;
29、信息整合模块:云端将动态信息以及静态信息进行整合,并通过不断存入的动态信息及静态信息对云端数据进行实时更新,车辆通过云端进行数据共享;
30、状态预判模块:车辆通过v2x车路协同系统结合云端数据以及自身行驶状态提前感知预判行驶过程中可能出现的状态,根据提前感知预判行驶过程中可能出现的状态对车辆的行驶路径进行调整,获得调整后的行驶路径,车辆安装调整后的行驶路径进行行驶。
31、进一步的,所述信息获取设备包括:
32、条件分析模块:对想要实现车路协同这个目标的条件进行分析,确定实现这个目标需要使用到的静态信息;
33、数据确定模块:对所述地图进行分析,确定静态信息的类型以及参数数据;
34、建模操作模块:通过静态信息的类型以及参数数据对所述地图进行建模操作,得到道路环境的地面模型数据;
35、存入云端模块:将道路环境的地面模型数据存入云端,云端通过接入市政建设部门的官方网站以及中国地理空间数据云网站,并设置训练模型,让训练模型实时获取更新数据对地面模型数据进行实时更新。
36、进一步的,所述设备安装模块包括:
37、安装规则制定模块:通过地图获取的道路环境的静态信息数据,根据道路特点设置路侧采集设备的安装位置规则,并记录安装路侧信息采集设备位置的经纬度坐标;所述安装位置规则包括:针对城市道路,在有交通信号的路口根据原有设备进行感知;在路侧信息采集设备不能完全覆盖的路口,通过对角线安装交叉感知进行补盲;在主要干道将路侧信息采集设备安装在路旁路灯上,路侧采集设备两两之间间隔一个路灯;在环形路口,将车辆环绕区域做圆,以进口为起点,每隔90度安装一个路侧信息采集设备;针对高速、国道和省道,每隔197米设置一个路侧信息采集装置;针对隧道进出口有明暗交接的情况,通过在进出口设置路侧采集装置;在急弯、匝道的进出口设置路侧信息采集设备;
38、检测计算模块:车载信息监控设备以及路侧信息采集设备同时采集、检测并计算道路环境的动态信息,并通过v2x车路协同系统实现车与车、车与路侧信息采集设备以及路侧信息采集设备以及路侧信息采集设备与路侧信息采集设备之间的数据共享与通信;
39、信息存入云端模块:将车载信息监控设备以及路侧信息采集设备采集、检测并计算得到的动态信息以及路侧信息采集设备的经纬度坐标通过v2x车路协同系统实时存入云端;
40、具体信息获取模块:通过v2x车路协同系统结合云端获取具体信息。
41、进一步的,所述信息整合模块包括:
42、位置确定模块:v2x车路协同系统通过路侧信息采集设备的经纬度坐标以及车辆自身携带的gps定位器确定当前动态信息采集的具体位置;
43、区间确定模块:通过所述动态信息采集的具体位置确定其在道路环境的地面模型中对应的静态位置区间;
44、整合匹配模块:将动态信息采集的位置与地面模型中对应的静态位置进行整合匹配,得到动静结合的道路环境信息;
45、实时更新模块:云端通过v2x车路协同系统不断存入的道路环境信息对云端数据进行实时更新。
46、进一步的,所述状态预判模块包括:
47、交通信息获取模块:车辆通过v2x车路协同系统实时获取当前区域的交通信息,所述信息包括实时路况以及动态信息;
48、计算反馈模块:云端通过对v2x车路协同系统不断存入的道路环境信息进行分析计算,预判车量行驶过程中可能出现的状况,并将可能出现的状况系信息反馈给车辆;
49、路径规划模块:车辆通过云端反馈的状况信息对行驶状态进行调整并提取规划好行驶路径。
50、本发明有益效果:车路协同是采用先进的无线通信和新一代互联网等技术,全方位实施车与车、车与行人、车与路等动态实时信息交互,并在全时空动态交通信息采集与融合的基础上,开展车辆主动安全控制和道路协同管理,充分实现人、车、路的有效协同,保证行车安全,提高通行效率,改善交通环境,从而形成的安全、高效和环保的道路交通系统。即车路协同实现的前提是依托于无线通信和互联网技术的普及,并需在人、车、路等交通参与角色上,建立信息通信系统,以供实现车与车、车与行人、车与路等动态实时信息交互。
- 还没有人留言评论。精彩留言会获得点赞!