一种机器人无线遥控装置的制作方法
本发明涉及无线遥控,尤其涉及一种机器人无线遥控装置。
背景技术:
1、无线遥控是指实现对被控目标的非接触遥远控制,在工业控制、航空航天、家电领域应用广泛。无线遥控和无线传输系统与有线和红外设备相比提高了移动自由度。由此使无线遥控装置和无线传输系统在工业领域的应用越来越多。随着移动通信网络和电子技术的快速发展,无线遥控系统拥有了便利的发展条件。将移动通信技术嵌入到机器人控制中,使后者突破时空的限制,发挥更大的作用。人们可以在奔波的旅途中或灾难现场通过手机下达指令遥控机器人干活或抢救生命,也可以在手机屏幕上看到现场情况,从而使机器人的使用更加便捷化、更加智能化。
2、现有的机器人无线遥控装置无法自行中断异常控制指令,机器人使用寿命短,不方便用户使用;此外,现有的机器人无线遥控装置的数据安全性以及真实性差,同时数据处理效率低下,为此,我们提出一种机器人无线遥控装置。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种机器人无线遥控装置。
2、为了实现上述目的,本发明采用了如下技术方案:
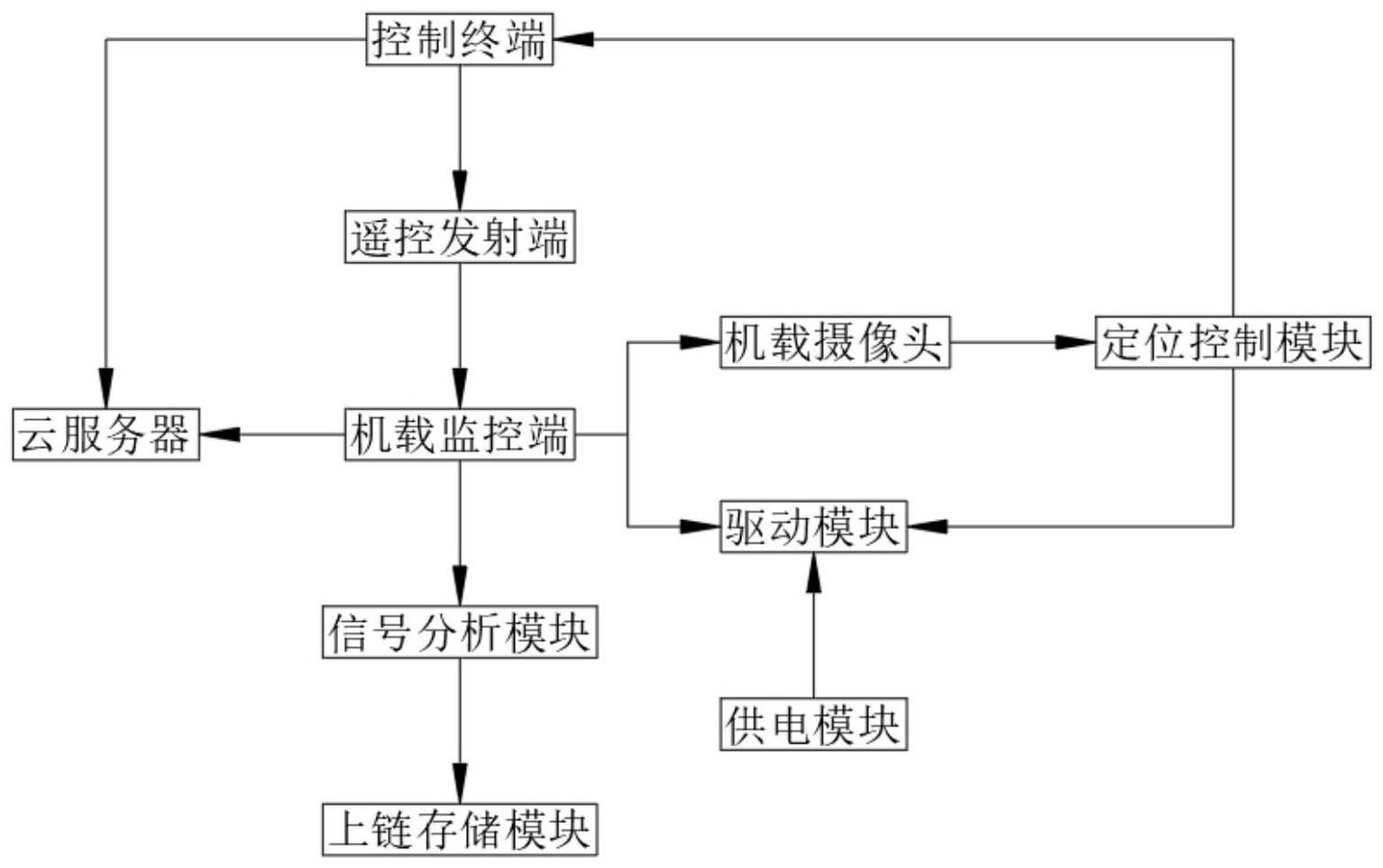
3、一种机器人无线遥控装置,包括控制终端、遥控发射端、机载监控端、信号分析模块、机载摄像头、驱动模块、供电模块、定位控制模块、云服务器以及上链存储模块;
4、所述控制终端用于用户下发控制指令;
5、所述遥控发射端用于将控制指令转换成光电信号进行发送;
6、所述机载监控端用于接收遥控发射端发送的光电信号;
7、所述信号分析模块用于对机载监控端接收的光电信号进行检测分析;
8、所述机载摄像头用于该机器人采集周围环境信息并将其反馈至控制终端以供用户查看;
9、所述驱动模块用于依据分析结果驱动机器人做出相对应的指令动作;
10、所述供电模块用于为各子模块进行供电;
11、所述定位控制模块用于实时对该机器人位置进行锁定反馈;
12、所述云服务器用于存储用户操作信息以及机器人运行信息;
13、所述上链存储模块用于将机器人各项运行数据进行区块链存储。
14、作为本发明的进一步方案,所述控制终端具体包括智能手机、平板电脑、笔记本电脑以及台式电脑。
15、作为本发明的进一步方案,所述信号分析模块检测分析具体步骤如下:
16、步骤一:信息分析模块从云服务器中提取过往信号数据,之后对各组信号数据进行归一化处理,再筛选出表征能力较好的信号数据,然后构建一组卷积神经网络;
17、步骤二:将剩余信号数据分为训练集以及测试集,并通过进行对训练集进行输入、卷积、池化、全连接和输出的学习训练,得到信号分析模型,之后利用测试集对信号分析模型进行测试,若测试准确率满足期望值,则停止训练,反之继续对其进行训练;
18、步骤三:对当前信号数据进行预处理,之后将各组信号数据导入训练完成的信号分析模型中,信号分析模型接收对各组信号数据进行分析,同时对机器人后续运行状态进行预测;
19、步骤四:依据预测状态以及预设的合理标准对当前用户指令合理性进行判断,若用户指令不合理,则中断该指令执行,同时反馈用户指令错误,若用户指令合理,则将控制驱动模块使机器人执行相对应指令信息。
20、作为本发明的进一步方案,所述信号分析模型具体训练步骤如下:
21、步骤(1):从过往信号数据中选取一组作为观测数据,并使用剩下数据拟合一个测试模型,再使用观测数据来验证测试模型的精度,并重复多次通过均方根误差对该测试模的评估能力进行计算以获取多组精度参数,依据预设的学习率以及步长列出所有可能的数据样本;
22、步骤(2):选取任意一个子集作为测试集,其余子集作为训练集,训练模型后对测试集进行预测,统计测试结果的均方根误差,之后将测试集更换为另一子集,再取剩余子集作为训练集,再次统计均方根误差,直至对所有数据样本都进行一次预测,通过选取均方根误差最小时对应的组合参数作为数据区间内最优参数,并替换信号分析模型原有参数。
23、作为本发明的进一步方案,步骤(1)所述均方根误差具体计算公式如下:
24、
25、其中,e(yi)表示第i个实际观测值,yi为模型反演出的第i个预测值,n是观测样本总数。
26、作为本发明的进一步方案,所述定位控制模块锁定反馈具体步骤如下:
27、步骤ⅰ:定位控制模块实时与gps卫星进行交互,并对机器人位置进行定位,同时实时接收控制终端位置信息,再通过机载摄像头对机器人周围环境信息进行采集;
28、步骤ⅱ:定位控制模块依据采集到的影像数据构建对应区域三维模型,同时依据实时采集的信息对该区域模型进行更新,并将控制终端位置以及机器人位置在该区域模型中进行标记,同时测算两者之间的距离,若超出预设的距离范围,则向控制终端发出警报信息,并中断机器人运行进程。
29、作为本发明的进一步方案,所述上链存储模块区块链存储具体步骤如下:
30、步骤①:上链存储模块与外部区块链进行通信连接,之后将采集到的运行数据预处理成统一格式,并将各组运行数据处理成符合条件的区块,之后在入网时,区块链网络中各节点生成本地的公私钥对作为自己在网络中的标识,当某一节点等待本地角色成为候选节点时,向网络中其他节点广播领导申请并发送;
31、步骤②:另一节点对收到的申请进行验证,验证通过则向候选节点返回相关验证数据,并不再同意新的申请;验证未通过则请求全网共识检查错误方,若申请节点出错则修改本地记录再次验证;
32、步骤③:当候选节点成为领导节点后,其他节点成为跟随节点,之后领导节点广播区块记录信息,跟随节点收到信息以后向其他跟随节点广播收到的信息并记录重复次数;广播结束后,跟随节点使用重复次数最多的信息生成区块头,并向领导节点发送确认申请;
33、步骤④:领导节点收到确认申请后检查验证数据是否正确,若存在跟随节点出错,则向其重新发送验证数据,并要求该跟随节点向其他跟随节点发送请求信息;
34、步骤⑤:所有跟随节点发送的请求信息都验证通过后,领导节点发送添加命令并进入沉睡期,在沉睡期内不能再次申请成为领导节点,直到结束沉睡期,跟随节点收到确认信息后,将新生成的各组区块添加至链上并返回候选身份。
35、相比于现有技术,本发明的有益效果在于:
36、1、该机器人无线遥控装置通过信息分析模块从云服务器中提取过往信号数据,之后对各组信号数据进行归一化处理,再筛选出表征能力较好的信号数据,然后构建一组卷积神经网络以构建信号分析模型,并自行寻找该信号分析模型的最优参数进行替换,之后对当前信号数据进行预处理,之后将各组信号数据导入训练完成的信号分析模型中,信号分析模型接收对各组信号数据进行分析,同时对机器人后续运行状态进行预测,然后依据预测状态以及预设的合理标准对当前用户指令合理性进行判断,若用户指令不合理,则中断该指令执行,同时反馈用户指令错误,若用户指令合理,则将控制驱动模块使机器人执行相对应指令信息,能够自行中断异常控制指令,有效的提高机器人使用寿命,同时能够自行建模寻参,使操作更加简单便捷,方便用户使用。
37、2、本发明通过上链存储模块与外部区块链进行通信连接,之后将采集到的运行数据预处理成统一格式,并将各组运行数据处理成符合条件的区块,之后在入网时,区块链网络中各节点生成本地的公私钥对作为自己在网络中的标识,当某一节点等待本地角色成为候选节点时,向网络中其他节点广播领导申请并发送,验证通过后,候选节点成为领导节点后,其他节点成为跟随节点,之后领导节点以及跟随节点广播区块信息并记录重复次数,并使用重复次数最多的信息生成区块头,并向领导节点发送确认申请,申请通过后,领导节点发送添加命令并进入沉睡期,在沉睡期内不能再次申请成为领导节点,直到结束沉睡期,跟随节点收到确认信息后,将新生成的各组区块添加至链上并返回候选身份,能够降低区块链数据处理时的能耗,并提高其数据处理效率,满足了去中心化需求,同时保证了数据安全性以及真实性。
- 还没有人留言评论。精彩留言会获得点赞!