一种基于路面破损因素的无人公交集群灵活调度系统的制作方法
本发明涉及无人公交调度,尤其是涉及一种基于路面破损因素的无人公交集群灵活调度系统。
背景技术:
1、当前智慧交通结合单车智能、车路协同以及平台大数据调度技术已经成为解决方案新趋势,智能网联公交调度方案在当前智能网联示范运营中成为关注的重点。现有的公交调度系统主要是通过获取当前交通环境状态,对未来趋势进行预测并进行智能排版调度,常见的预测方式有基于历史数据和基于模型的两种方式:基于历史数据的预测方式虽然简单易实现,但历史交通数据并不能真实的反应未来的变化趋势,满意满足精细化的微观调度需求;基于模型的预测方式通过收集交通状态、天气等信息来建立机理模型,用于推测交通状况的变化趋势,但是环境影响因素较多,数学模型建立较为困难且资源消耗以及参数调试难度大。
2、在预测完成的基础上,主流的无人公交集群调度方法可分为两大类:基于规则的方法和基于优化算法的方法。基于规则的方法主要基于预设的规则和逻辑来进行调度:例如将每个车辆分配到固定的路线上,并结合道路交通状况预测结果计算相邻公交车之间的发车间隔。这种方法的优点在于简单易实现,但是其缺点在于,各辆公交车一旦发车后将无法根据实际情况动态调整路线和行驶速度,即无法灵活地考虑到道路变化。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于路面破损因素的无人公交集群灵活调度系统,不仅能够使得公交车利用车载感知能力识别到道路上的异常情况,尽可能利用自主运动能力避免自身驶入该区域,而且能够防范乘客舒适度降低,防止车身损害,防止造成交通拥堵,防止造成路面进一步损毁。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
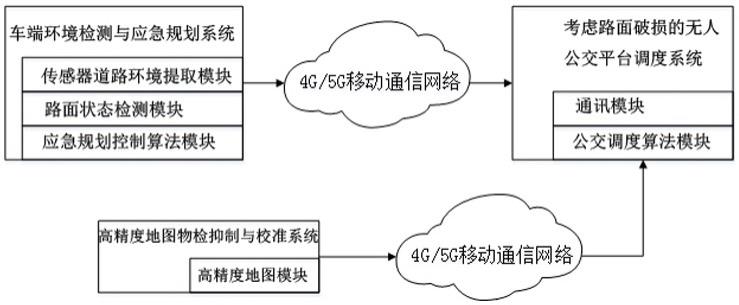
3、一种基于路面破损因素的无人公交集群灵活调度系统,包括车端环境检测与应急规划系统、高精度地图物检抑制与校准系统和考虑路面破损的无人公交平台调度系统;
4、所述车端环境检测与应急规划系统,包括传感器道路环境提取模块、路面状态检测模块和应急规划控制算法模块,实时获取路面高程信息、路面颜色信息和路面纹理信息,并利用深度学习检测网络实现路面的检测和分类,针对路面的检测和分类在局部行车轨迹规划中增加对驶入该区域的代价惩罚,采用在惯性cartesian坐标系中进行应激式的轨迹规划;
5、所述高精度地图物检抑制与校准系统,与所述车端环境检测与应急规划系统连接,获取路面的检测和分类,结合高精度地图中的语义信息对路面状况进行误检筛查,将识别到的破损区域投射在高精度地图中进行破损轮廓分析和判断;
6、所述考虑路面破损的无人公交平台调度系统,包括通讯模块和公交调度算法模块,通过所述通讯模块与所述车端环境检测与应急规划系统、所述高精度地图物检抑制与校准系统连接,实时获取破损路面数据信息,根据公交调度算法模块,输出无人公交调度数据信息。
7、进一步的,所述利用深度学习检测网络实现路面的检测和分类包括:
8、t1.对所述路面高程信息、路面颜色信息和路面纹理信息进行降噪和增强预处理,输出预处理后的路面数据信息;
9、t2.基于所述预处理后的路面数据信息,采用yolov7网络进行网络迭代训练,输出训练后的路面数据信息;
10、t3.将所述训练后的路面数据信息和预存的路面破损图片数据信息输入model网络进行检测和分割,输出路面破损的位置信息、类别信息和面积信息。
11、进一步的,所述应急规划控制算法模块中的应急规划控制算法包括:
12、u1.获取路面检测和分类的数据信息,所述路面检测和分类的数据信息包括路面破损的位置信息、类别信息和面积信息;
13、u2.根据所述路面破损的位置信息、类别信息和面积信息,获取路面破损区域边界点的坐标数据信息,采用改进的人工鱼算法进行特征坐标点提取,输出路面破损区域边界特征点数据信息;
14、u3.基于所述路面破损区域边界特征点数据信息,采用三次曲线多项式进行局部路径拟合,
15、,
16、其中,a0、a1、a2和a3为曲线系数,输出应急规划局部路径数据信息。
17、进一步的,在步骤u2中,所述改进的人工鱼算法包括:
18、u21.将所述路面破损区域边界点的坐标数据信息按照横坐标大小进行排序,输出起点和终点的坐标数据信息;
19、u22.以所述起点的坐标数据信息为人工鱼,步长为任意路面破损区域边界点中相邻两点之间的距离中的最大值,采用正余弦算法进行搜索,输出路面破损区域边界特征点数据信息。
20、进一步的,所述结合高精度地图中的语义信息对路面状况进行误检筛查为如果在高精度地图中存在固定设施与路面破损区域的轮廓吻合,则判定路面破损区域无效。
21、进一步的,所述公交调度算法模块中的公交调度算法包括:
22、h1.基于所述破损路面数据信息,对无人公交的运营路线进行查询,输出与破损路面相关的无人公交运营路线数据信息;
23、h2.基于所述与破损路面相关的无人公交运营路线数据信息,进行乘客及相关站点信息的查询和考虑,若乘客上车站点与下车站点在所述与破损路面相关的无人公交运营路线上,则不对该破损路面相关的无人公交运营路线进行调整,通过车端的应急规划控制算法模块进行破损路面规避;
24、h3.若乘客上车站点与下车站点不在所述与破损路面相关的无人公交运营路线上,则通过无人公交运营路线上任意两站点之间路径与时间差的匹配合理程度、乘客通行效率、路网交通态势未来预测趋势构建加权单目标代价函数,
25、,
26、其中gi为第i条运营路线的单目标代价函数,xi为第i条运营路线的路径与时间差的合理程度匹配值,yi为第i条运营路线的乘客通行效率,zi为路网交通态势未来预测趋势值,α、β和γ为代价常量参数;
27、h4.基于所述加权单目标代价函数gi,对所述乘客上车站点与下车站点不在所述与破损路面相关的无人公交运营路线进行公交线路调整,输出无人公交调度数据信息。
28、进一步的,在步骤h3中,所述代价常量参数α、β和γ的限制条件为:
29、。
30、进一步的,所述无人公交运营路线上任意两站点之间路径与时间差的匹配合理程度的表征为无人公交运营路线上的车辆停靠点有n+1个,构建一个1行n列的解向量来表征。
31、进一步的,所述车端环境检测与应急规划系统还包括车载激光雷达和车载摄像头,基于所述车载激光雷达获取路面高程信息,基于所述车载摄像头获取路面颜色信息和路面纹理信息。
32、进一步的,所述车端环境检测与应急规划系统、所述高精度地图物检抑制与校准系统和所述考虑路面破损的无人公交平台调度系统之间通过4g/5g移动通信网络进行通信连接。
33、本发明具有以下积极效果:
34、1.本发明通过无人公交的车端环境检测与应急规划系统能够使得公交车利用车载感知能力识别到道路上的异常情况,尽可能利用自主运动能力避免自身驶入该区域,从而防范乘客舒适度降低,防止车身损害,防止造成交通拥堵,防止造成路面进一步损毁。
35、2.本发明通过考虑路面破损的无人公交平台调度系统进行长远部署,防止未来其他车辆进一步驶入该异常路面区域,从而进一步防范乘客舒适度降低,防止车身损害,防止造成交通拥堵,防止造成路面进一步损毁。
- 还没有人留言评论。精彩留言会获得点赞!