一种高速公路后方超视距潜在危险车辆检测方法
本发明涉及高速公路,尤其涉及一种高速公路后方超视距潜在危险车辆检测方法。
背景技术:
1、在高速公路上行驶,驾驶员对于后方车辆行驶状况只能通过后视镜或者车身传感器来观察有限的路段,对于超出视距范围的危险无法感知,导致危险车辆逼近之时,无法及时反应而引发事故。而新基建建设成本较高,在技术、资金、体制、模式等方面都有不少困难和挑战。因此,高速公路迫切需要一种智能化方法,实现对高速公路信息的全面、快速、准确的收集与处理,并将信息传达给相对应的驾驶员,减少交通事故的发生,提升高速公路运行效率。因此,在智能驾驶环境下的高速公路后方超视距潜在危险车辆检测方法可解决以上困难,对于智能驾驶技术研究有重要意义。
技术实现思路
1、本发明的目的在于提供一种高速公路后方超视距潜在危险车辆检测方法。
2、本发明采用的技术方案是:
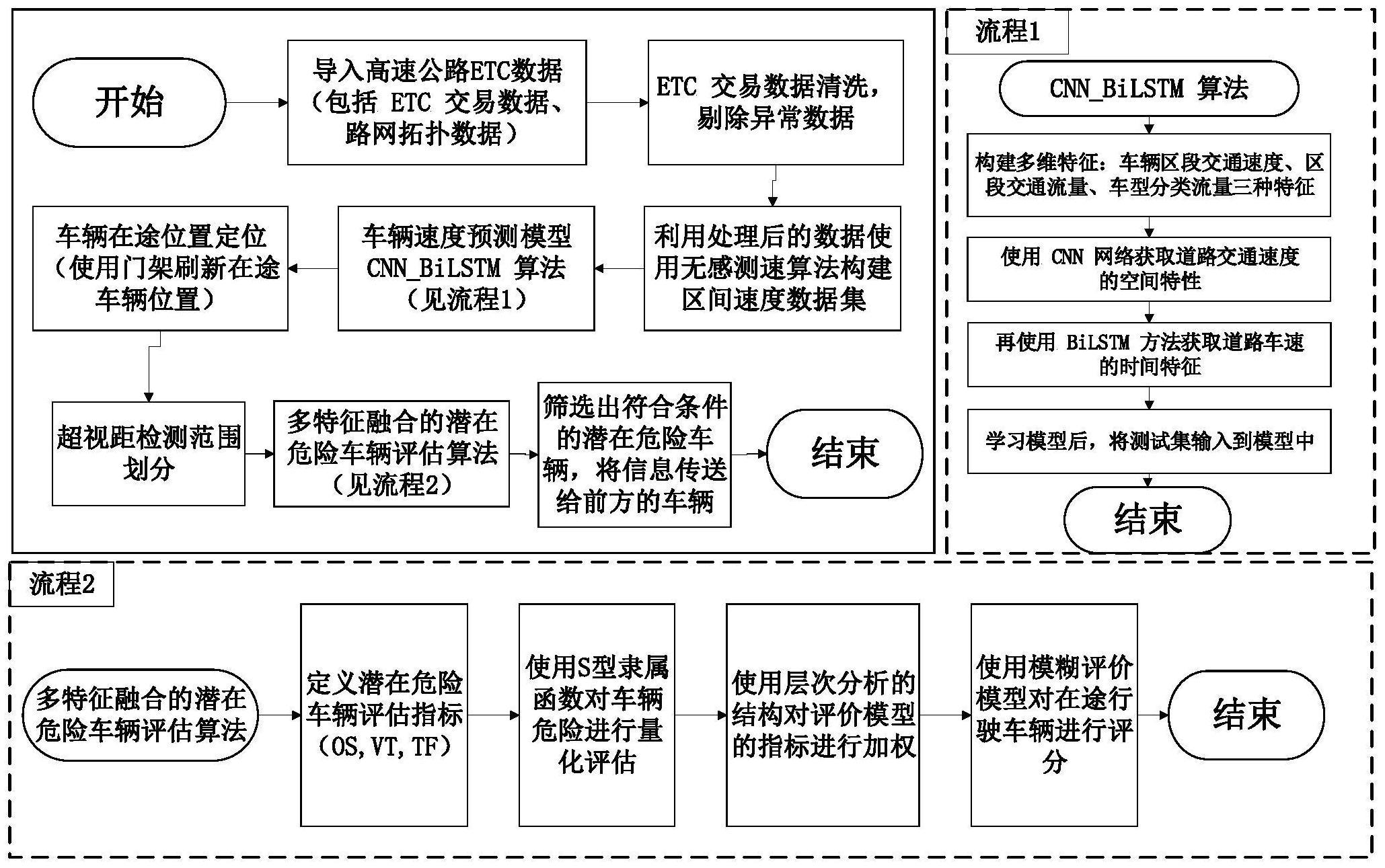
3、一种高速公路后方超视距潜在危险车辆检测方法,其包括以下步骤:
4、步骤1,获取高速公路etc数据,并进行数据清洗剔除异常数据得到车辆交易数据;
5、步骤2,基于清洗后的车辆交易数据获取每个区段的相邻2个门架车辆交易时间,并计算2个门架的时间差,以构建每个区段的车辆通行时间;
6、步骤3,获取每个区段的相邻2个门架之间的距离,并结合每个区段的车辆通行时间计算车辆的区段通行速度,以构建车辆速度数据集,使用阈值滤波法的上下限去除车辆速度数据集中的异常点,从而提高速度预测模型的准确性;
7、步骤4,构建基于cnn网络与bi-lstm网络的车辆速度预测模型,并利用车辆速度数据集进行训练测试得到最优的车辆速度预测模型;
8、步骤5,将处理好的在途车辆历史区段的通行速度输入训练好的cnn_bilstm模型中,计算出当前区段的车辆通行速度;
9、步骤6,通过对历史车辆通行速度数据进行统计分析,确定车辆超视距的检测范围,基于车辆超视距范围通过etc仿真系统设置虚拟门架以平均设置门架的距离,进而结合车辆通行速度得到车辆所在区段实现车辆定位;
10、步骤7,基于车辆定位结果采用多特征融合算法检测车辆的超视距范围内存在的潜在危险车辆;
11、步骤8,将超视距范围内的潜在危险车辆信息反馈给前方对应区段的订阅超视距服务的车辆驾驶员,并实时更新。
12、进一步地,步骤3的构建车辆速度数据集的具体步骤如下:
13、步骤3-1,提取经过目标区段qd内的车辆数据,根据车牌号和etc门架交易时间进行排序得到车辆的ntraj;
14、步骤3-2,从高速公路路网区段集合中提取目标区段qd前后门架node1和node2收集到的交易时间tstart和tend,计算车辆目标区段qd的通行时间δt,基于相邻门架之间距离数据得到对应车辆ntraj相邻门架之间的距离l;
15、δt=|tstart-tend| (1)
16、其中,tend表示通过目标区段qd后一个门架的时间,tstart表示通过目标区段qd前一个门架的时间;
17、步骤3-3,计算车辆通过目标区段qd的行驶速度vcar,具体计算公式如下:
18、
19、其中,l表示目标区段qd的实际长度,δt表示车辆途径目标区段qd的时间差。
20、步骤3-4,使用阈值滤波法的上下限去除车辆速度数据集中的异常点;q1是1/4分位点,1/4分位点之前的数据占总样本概率的25%,q3是3/4分位点,3/4分位点之前的数据占总样本的75%,q2是中位数,中位数之前的数据占总样本的50%,得到箱线图的上下限位:
21、upper limit:q3+1.5*iqr
22、lower limit:q1-1.5*iqr
23、其中,iqr是分位点q1、q3之间的距离,即iqr=q3-q1。
24、进而获得速度滤波阈值:
25、vt∈(lower limit,upper limit)
26、其中,区段行车区间速度数据在vt范围内则保留,超出则进行离群数据清洗。
27、进一步地,步骤4的具体步骤如下:
28、步骤4-1,基于车辆速度预测的需求构建多维特征,多维特征包括车辆区段交通速度、区段交通流量、车型分类;
29、步骤4-2,利用cnn网络对交通样本数据进行卷积运算并池化降维处理,得到道路交通速度的空间特征信息
30、步骤4-3,利用bi-lstm捕捉交通速度的变化进行模型训练,捕获交通速度在时间维度上的特征,以拟合交通速度的动态变化规律得到道路车速的时间特征信息;
31、步骤4-4,分别利用车辆速度数据集对cnn网络与bi-lstm网络进行训练测试,以得到车辆速度预测模型。
32、进一步地,车辆速度数据按设定比例分为训练集和测试集以进行训练测试;设定比例为7:3。
33、进一步地,步骤6取2km作为车辆超视距范围,并使用4km、6km作为辅助车辆超视距范围,让驾驶员提前感知超视距的路况。
34、进一步地,步骤7的具体步骤如下:
35、步骤7-1,获取当前在途行驶车辆的潜在危险指标,使用s型隶属函数计算得到车辆危险的各个潜在危险指标的隶属度;潜在危险指标包括车辆类型μvt(x1)、通行速度μos(x2)以及车辆所在区段的交通流μtf(x3);
36、步骤7-2,使用层次分析对潜在危险车辆评价指标进行维度加权,以得到不同指标对潜在危险车辆危险性评价的权重ωi,即不同的指标对结果的影响程度;
37、步骤7-3,通过潜在危险车辆评价指标与潜在危险等级之间的关系,构建模糊矩阵r。
38、
39、其中,其中ri1表示第i个评价指标对评语1的隶属度,rin表示第i个评价指标对评语n的隶属度;其中危险评语集为{无危险、低危险、中度危险和高危险};
40、步骤7-4,将层次分析法计算的权重a=[ω1,ω2,ω3]与模糊矩阵相结合进行综合评判:
41、b=a*r (21)
42、步骤7-5,根据隶属度最大原则,选取b矩阵中的最大值分数作为车辆此时段的潜在危险性评分。
43、进一步地,步骤7-1的具体步骤如下:
44、步骤7-1-1,建立车辆所在区段的交通状态的模糊集μa(x)→[0,1],
45、步骤7-1-2,基于s型隶属函数计算潜在危险指标各个指标对应的隶属度;s型隶属函数的表达式如下:
46、
47、其中,μa(x)指的是潜在危险指标的测量参数x的隶属度,x表示潜在危险指标的测量参数,元素a指的是潜在危险指标os、vt、tf;a、b、m指的是函数中的分阶段参数且b>m>a;a、b、m参数的取值通过使用路段的通行数据进行统计分析并结合交通法法律法规的限制而确定。
48、进一步地,步骤7-2中使用ahp的结构来描述危险性评价等级的建模,具体步骤如下:
49、步骤7-2-1,建立判断矩阵,比较任意两个潜在危险指标之间的重要性,将两两潜在危险指标重要程度比较值作为判断矩阵的元素,构建判断矩阵d=rij(n×n);
50、步骤7-2-2,通过判别矩阵计算一致性指标ci,计算公式如下所示:
51、
52、其中,λmax为矩阵的最大特征根;
53、步骤7-2-3,构建随机一致性指标ri,并结合一致性指标ci计算得到一致性比率cr,
54、
55、步骤7-2-4,判断一致性比率cr是否小于设定值;如果是,则一致性验证通过并执行步骤7-2-5;否则,没有通过一致性验证并执行步骤7-2-1;
56、步骤7-2-5,对矩阵d的列向量进行归一化处理,得到归一化之后的矩阵
57、步骤7-2-6,计算矩阵的中行向量的均值,得到权重向量ωi,即得到各个指标的权重ωi;
58、
59、进一步地,步骤7-2-4中的设定值为0.1。
60、进一步地,步骤8的具体步骤如下:
61、步骤8-1,计算订阅超视距服务的车辆和潜在危险车辆之间的距离δs以估算车辆的具体位置进行潜在危险车辆位置信息的实时更新,距离δs的计算如公式如下所示:
62、δs=|t2-t1|×|v2-v1|(22)
63、其中t1、v1分别为潜在危险车辆的交易时间和区段平均通行速度,t2、v2分别为订阅超视距服务车辆的交易时间和区段平均通行速度;
64、步骤8-2,基于距离δs确认超视距范围内的潜在危险车辆,并将潜在危险车辆信息提供给前方行驶的订阅超视距服务的车辆,则使驾驶员提前做好决策。
65、本发明采用以上技术方案,使用的是etc门架收集的车辆通行数据基于卷积神经网络结合双向长短期记忆网络以及潜在危险车辆检测算法进行在途车辆安全检测。相较于现有技术具有如下技术特点:(1)通过相邻2个门架获取的车辆交易时间,通过计算时间差,构建每个区段的车辆通行时间,再使用无感测速算法计算车辆的区段通行速度,最后构建车辆速度数据集。(2)基于cnn网络与bi-lstm网络相结合的高速公路车辆速度预测方法。首先通过cnn网络获取道路交通速度的空间特性,然后再利用bilstm方法获取道路车速的时间特征,从而构建基于多种特征信息的道路动态时空变化模型。(3)通过etc仿真系统设置门架间隔,通过对道路以及车辆多特征结合分析,论证门架分布合理性以及划分超视距检测的范围,以通过etc门架刷新在途车辆位置。(4)构建基于车辆类型、通行速度、区段交通流和路段特征动态衡量单车在途行驶安全性评估潜在危险车辆,提高模型判断准确性。
66、在智能驾驶环境下,驾驶员对周围环境的感知对行车安全起关键作用,而对超视距范围内可能存在的潜在危险车辆进行有效的辨识,是避免事故发生、实现行车安全的重要手段。本发明通过车端、路端、云端之间的信息交互,使驾驶员对周围的环境有更加全面的判断,对于视距之外存在的潜在危险因素提前感知,从而最大程度地减少交通事故发生。
- 还没有人留言评论。精彩留言会获得点赞!