车辆荷载下中小桥梁动态响应的前触式监测方法及系统与流程
本技术实施例涉及桥梁安全监测,尤其涉及一种车辆荷载下中小桥梁动态响应的前触式监测方法及系统。
背景技术:
1、桥梁是道路交通网络的关键节点,桥梁安全关系路网畅通与人民生命财产安全息息相关。但是,在长期服役过程中,受车辆荷载、外在环境以及材料劣化等因素影响,桥梁使用性能和承载能力将逐渐衰减。随着我国在役桥梁的“老龄化”和服役条件恶化,桥梁运营安全问题愈加凸显,倒塌事故日益增加。尤其对于量大面广的中小桥梁,其存在养护资金有限、受重视程度低、养护检查力度弱及病害处置不及时等较为严重的结构安全和技术状况问题。当前,中小桥梁的结构安全和技术状况评估主要依靠人工定期来检测,存在检测频次低,评价主观性强、与结构受力状态关联弱的问题。在此背景下,中小桥梁结构监测以及安全评估成为了重要发展方向。
2、在实现本技术的过程中,发明人发现车辆荷载是运营期内影响中小桥梁结构安全的主要原因,其随机性和偶然性无形中增加了桥梁结构的安全风险。与长大桥梁相比,中小桥梁的自重比较轻,且不像长大桥梁存在索缆体系,由此导致中小桥梁活载效应占比高,对车辆荷载更敏感。而且,常见装配式的中小桥梁在重载路段存在单板(梁)受力,结构安全本来就存在一定的隐患。
3、因此,监测中小桥梁结构动态响应,获取复杂运营条件下桥梁的时变性能,成为保障桥梁结构安全的重要手段。目前,在中小桥梁结构监测时,主要通过后触发式方法,采集车辆经过桥梁后,桥梁结构的挠度等动态响应参数,以此评估结构整体性和运营安全状态,无法提前感知运营风险。
技术实现思路
1、本技术的目的在于提出一种车辆荷载下中小桥梁动态响应的前触式监测方法及系统,用于解决或者克服现有技术中存在的上述技术问题。
2、根据本技术实施例的第一方面,提供了一种车辆荷载下中小桥梁动态响应的前触式监测方法,其包括:
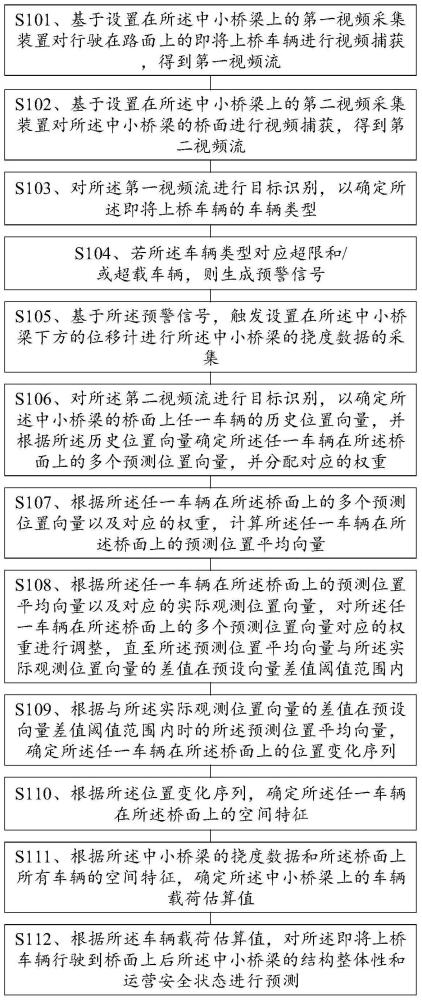
3、基于设置在所述中小桥梁上的第一视频采集装置对行驶在路面上的即将上桥车辆进行视频捕获,得到第一视频流;
4、基于设置在所述中小桥梁上的第二视频采集装置对所述中小桥梁的桥面进行视频捕获,得到第二视频流;
5、对所述第一视频流进行目标识别,以确定所述即将上桥车辆的车辆类型;
6、若所述车辆类型对应超限和/或超载车辆,则生成预警信号;
7、基于所述预警信号,触发设置在所述中小桥梁下方的位移计进行所述中小桥梁的挠度数据的采集;
8、对所述第二视频流进行目标识别,以确定所述中小桥梁的桥面上任一车辆的历史位置向量,并根据所述历史位置向量确定所述任一车辆在所述桥面上的多个预测位置向量,并分配对应的权重;
9、根据所述任一车辆在所述桥面上的多个预测位置向量以及对应的权重,计算所述任一车辆在所述桥面上的预测位置平均向量;
10、根据所述任一车辆在所述桥面上的预测位置平均向量以及对应的实际观测位置向量,对所述任一车辆在所述桥面上的多个预测位置向量对应的权重进行调整,直至所述预测位置平均向量与所述实际观测位置向量的差值在预设向量差值阈值范围内;
11、根据与所述实际观测位置向量的差值在预设向量差值阈值范围内时的所述预测位置平均向量,确定所述任一车辆在所述桥面上的位置变化序列;
12、根据所述位置变化序列,确定所述任一车辆在所述桥面上的空间特征;
13、根据所述中小桥梁的挠度数据和所述桥面上所有车辆的空间特征,确定所述中小桥梁上的车辆载荷估算值;
14、根据所述车辆载荷估算值,对所述即将上桥车辆行驶到桥面上后所述中小桥梁的结构整体性和运营安全状态进行预测。
15、可选地,所述第一视频采集装置和所述第二视频采集装置相邻,且设置在所述中小桥梁的桥头位置,以使得所述第一视频采集装置的视频采集角度朝向所述路面,所述第二视频采集装置的视频采集角度朝向所述桥面。
16、可选地,所述第一视频采集装置和所述第二视频采集装置进行视频捕获的帧率不低于25fps。
17、可选地,所述的方法,还包括:对行驶在路面上的即将上桥车辆和/或所述中小桥梁的桥面上任一车辆进行车牌识别,以对所述即将上桥车辆在所述路面形成的空间特征和所述即将上桥车辆行驶到所述桥面上后形成的空间特征进行融合,得到所述即将上桥车辆的空间融合特征。
18、可选地,所述的方法,还包括:使所述挠度数据以及所述第二视频流在时间序列上对齐,使对齐的时程差值小于等于20ms,以使得所述中小桥梁的挠度数据和在所述桥面上的所有车辆的空间特征对应。
19、可选地,所述的方法,还包括:
20、基于所述第一视频流,识别出所述即将上桥车辆在第k-1时刻在路面上的实时行驶状态向量,k为≥2的正整数;
21、根据所述即将上桥车辆在第k-1时刻在路面上的实时行驶状态向量,计算所述即将上桥车辆在第k时刻在路面上的多个预测行驶状态向量,并分配对应的权重;
22、根据所述即将上桥车辆在第k时刻在路面上的多个预测行驶状态向量,计算平均预测行驶状态向量,并与所述即将上桥车辆在第k时刻在路面上的观测行驶状态向量进行比对,以调整所述多个预测行驶状态向量对应的权重,直至所述平均预测行驶状态向量与所述观测行驶状态向量的距离在设定向量距离范围内;
23、根据与所述观测行驶状态向量的距离在设定向量距离范围内的所述平均预测行驶状态向量,确定所述即将上桥车辆在所述路面上的位置变化序列;
24、根据所述位置变化序列,确定所述即将上桥车辆在所述路面上的空间特征;
25、对应地,所述根据所述车辆载荷估算值,对所述即将上桥车辆行驶到桥面上后,所述中小桥梁的结构整体性和运营安全状态进行预测,包括:
26、根据所述车辆载荷估算值以及所述即将上桥车辆在所述路面上的空间特征,对所述即将上桥车辆行驶到桥面上后,所述中小桥梁的结构整体性和运营安全状态进行预测。
27、可选地,所述根据所述历史位置向量确定所述任一车辆在所述桥面上的多个预测位置向量包括:
28、根据设定的位置预测变换矩阵将所述历史位置向量变换到一状态空间中,并基于系统噪声,在所述状态空间中对所述历史位置向量进行修正,以确定所述任一车辆在所述桥面上的多个预测位置向量。
29、可选地,所述根据设定的位置预测变换矩阵将所述历史位置向量变换到一状态空间中,并基于系统噪声,在所述状态空间中对所述历史位置向量进行修正,以确定所述任一车辆在所述桥面上的多个预测位置向量,包括:
30、基于如下公式:sk=φsk-1+γuk-1,k=2,...,n,n为大于2的正整数,将所述历史位置向量变换到一状态空间中,并基于系统噪声,在所述状态空间中对所述历史位置向量进行修正,以确定所述任一车辆在所述桥面上的多个预测位置向量,其中,φ表示第k-1时刻对应的位置预测变换矩阵,uk-1表示第k-1时刻对应的系统噪声,γ表示噪声修正矩阵,sk表示第k时刻对应的一预测位置向量,其至少包括所述任一车辆在第k时刻在桥面坐标系中的横向和纵向位置坐标,sk-1表示第k-1时刻对应的一预测位置向量。
31、可选地,所述基于所述预警信号,触发设置在所述中小桥梁下方的位移计进行所述中小桥梁的挠度数据的采集,包括:
32、基于所述位移计对所述中小桥梁发生变形前进行以靶标点为中心的图像采集,以形成参考图像;
33、以所述靶标点在所述参考图像上的成像为中心,确定一子参考图像区域;
34、基于所述位移计对所述中小桥梁发生变形后进行图像采集,以形成目标图像;
35、计算所述目标图像和所述子参考图像区域的相关系数,并取所述相关系数最大时所述目标图像的像素构成的图像区域为子目标图像区域;
36、将所述子目标图像区域的中心点作为变形后所述靶标点对应的位置;
37、根据所述靶标点在所述参考图像上的位置以及所述靶标点在子目标图像区域的位置,计算所述中小桥梁的挠度数据。
38、根据本技术实施例的第二方面,提供了一种车辆荷载下中小桥梁动态响应的前触式监测系统,其包括:
39、第一视频采集装置,设置在所述中小桥梁上,用于对行驶在路面上的即将上桥车辆进行视频捕获得到第一视频流,并对所述第一视频流进行目标识别,以确定所述即将上桥车辆的车辆类型,若所述车辆类型对应超限和/或超载车辆,则生成预警信号;
40、第二视频采集装置,设置在所述中小桥梁上,用于对所述中小桥梁的桥面进行视频捕获得到第二视频流,并对所述第二视频流进行目标识别;
41、位移计,用于基于所述预警信号的触发进行所述中小桥梁的挠度数据的采集;
42、边缘计算装置,用于执行如下步骤:
43、根据对所述第二视频流的目标识别,确定所述中小桥梁的桥面上任一车辆的历史位置向量,并根据所述历史位置向量确定所述任一车辆在所述桥面上的多个预测位置向量,并分配对应的权重;
44、根据所述任一车辆在所述桥面上的多个预测位置向量以及对应的权重,计算所述任一车辆在所述桥面上的预测位置平均向量;
45、根据所述任一车辆在所述桥面上的预测位置平均向量以及对应的实际观测位置向量,对所述任一车辆在所述桥面上的多个预测位置向量对应的权重进行调整,直至所述预测位置平均向量与所述实际观测位置向量的差值在预设向量差值阈值范围内;
46、根据与所述实际观测位置向量的差值在预设向量差值阈值范围内时的所述预测位置平均向量,确定所述任一车辆在所述桥面上的位置变化序列;
47、根据所述位置变化序列,确定所述任一车辆在所述桥面上的空间特征;
48、根据所述中小桥梁的挠度数据和所述桥面上所有车辆的空间特征,确定所述中小桥梁上的车辆载荷估算值;
49、根据所述车辆载荷估算值,对所述即将上桥车辆行驶到桥面上后所述中小桥梁的结构整体性和运营安全状态进行预测。
50、本技术实施例提供的车辆荷载下中小桥梁动态响应的前触式监测方法及系统,基于设置在所述中小桥梁上的第一视频采集装置对行驶在路面上的即将上桥车辆进行视频捕获,得到第一视频流;基于设置在所述中小桥梁上的第二视频采集装置对所述中小桥梁的桥面进行视频捕获,得到第二视频流;对所述第一视频流进行目标识别,以确定所述即将上桥车辆的车辆类型;若所述车辆类型对应超限和/或超载车辆,则生成预警信号;基于所述预警信号,触发设置在所述中小桥梁下方的位移计进行所述中小桥梁的挠度数据的采集;对所述第二视频流进行目标识别,以确定所述中小桥梁的桥面上任一车辆的历史位置向量,并根据所述历史位置向量确定所述任一车辆在所述桥面上的多个预测位置向量,并分配对应的权重;根据所述任一车辆在所述桥面上的多个预测位置向量以及对应的权重,计算所述任一车辆在所述桥面上的预测位置平均向量;根据所述任一车辆在所述桥面上的预测位置平均向量以及对应的实际观测位置向量,对所述任一车辆在所述桥面上的多个预测位置向量对应的权重进行调整,直至所述预测位置平均向量与所述实际观测位置向量的差值在预设向量差值阈值范围内;根据与所述实际观测位置向量的差值在预设向量差值阈值范围内时的所述预测位置平均向量,确定所述任一车辆在所述桥面上的位置变化序列;根据所述位置变化序列,确定所述任一车辆在所述桥面上的空间特征;根据所述中小桥梁的挠度数据和所述桥面上所有车辆的空间特征,确定所述中小桥梁上的车辆载荷估算值;根据所述车辆载荷估算值,对所述即将上桥车辆行驶到桥面上后所述中小桥梁的结构整体性和运营安全状态进行预测,实现了运营风险的提前感知,保障了桥梁结构安全运行。
- 还没有人留言评论。精彩留言会获得点赞!