一种时空一体化智慧停车诱导方法
本发明属于停车诱导领域,涉及大数据处理技术,具体是一种时空一体化智慧停车诱导方法。
背景技术:
1、随着小汽车拥有量的激增,“停车难”问题日益凸显。如何最大限度利用现有停车资源,为出行车辆提供实时且精准的停车泊位信息,并引导出行车辆找到合适的停车泊位,减少出行车辆因寻找停车泊位的巡游时间,提高区域的停车效率,成为当下需要解决的关键问题;
2、目前路面常见的停车诱导屏存在的弊端包括:仅显示附近停车场的位置信息及空余泊位数,缺乏停车行程时间信息;或停车诱导系统较少同时考虑路段的通行能力和停车场的剩余泊位数;
3、为此,提出一种时空一体化智慧停车诱导方法。
技术实现思路
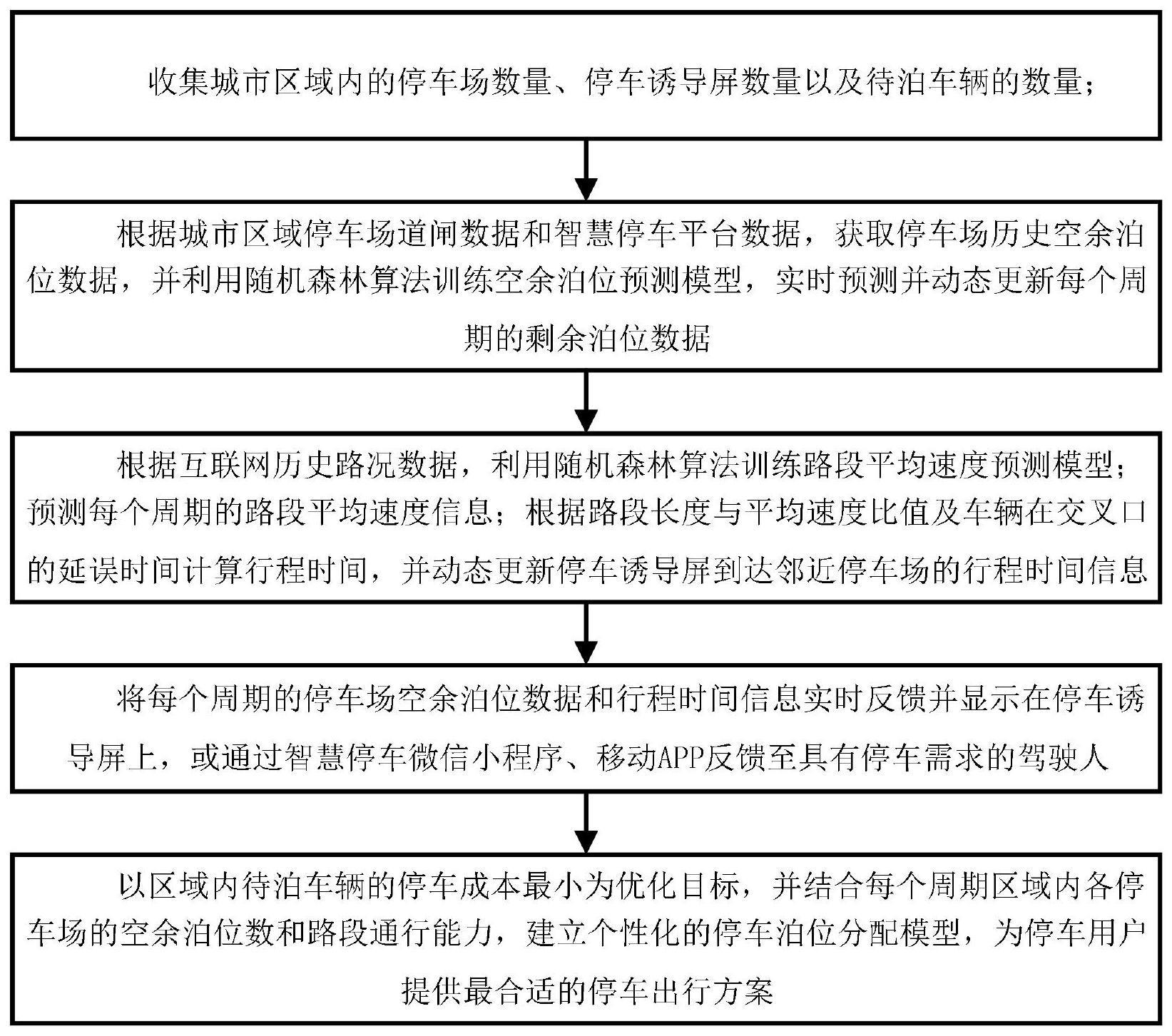
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种时空一体化智慧停车诱导方法,该一种时空一体化智慧停车诱导方法通过收集城市区域内的停车场数量、停车诱导屏数量以及待泊车辆的数量;获取停车场历史空余泊位数据,利用随机森林算法训练空余泊位预测模型,实时预测并动态更新每个周期的剩余泊位数据;利用随机森林算法训练路段平均速度预测模型;并基于实时的路况数据,预测每个周期的路段平均速度信息;根据路段长度与平均速度的比值及车辆在交叉口的延误时间计算行程时间;以区域内待泊车辆的停车成本最小为优化目标,建立个性化的停车泊位分配模型,为停车用户提供最合适的停车出行方案;解决了城市内停车实时诱导的问题。
2、为实现上述目的,根据本发明的第一方面的实施例提出一种时空一体化智慧停车诱导方法,包括以下步骤:
3、步骤一:收集城市区域内的停车场数量、停车诱导屏数量以及待泊车辆的数量;将停车场数量标记为m,将停车诱导屏数量标记为n,以及将待泊车辆标记为p,待泊车辆数量标记为np;
4、步骤二:根据城市区域停车场道闸数据和智慧停车平台数据,获取停车场实时空余泊位数据,根据历史空余泊位数据、实时路况数据、历史路况数据构建停车场最佳泊位供给预测模型,并利用随机森林算法训练最佳空余泊位供给预测模型,根据停车场周边路网交通承载能力,实时预测并动态更新每个周期的停车场可提供的最佳空余泊位数据;每个周期的间隔时间根据实际经验设置;
5、步骤三:通过接入互联网路况数据,根据互联网实时路况数据和历史路况数据,并考虑路段的时空关联特性,利用随机森林算法训练路段平均速度预测模型;并基于实时的路况数据,预测每个周期的路段平均速度信息;根据路段长度与平均速度的比值及车辆在交叉口的延误时间计算行程时间,并动态更新停车诱导屏到达邻近停车场的行程时间信息;
6、步骤四:将每个周期的停车场最佳空余泊位数据和行程时间信息实时反馈并显示在停车诱导屏上,或通过智慧停车微信小程序、移动app反馈至具有停车需求的驾驶人;
7、步骤五:对于安装智慧停车微信小程序、移动app的停车用户,以区域内待泊车辆的停车成本最小为优化目标,并结合每个周期区域内各停车场的空余泊位数和路段通行能力,建立个性化的停车泊位分配模型,为停车用户提供最合适的停车出行方案;
8、其中,每个周期的间隔时间根据实际经验设置;
9、其中,所述利用随机森林算法训练空余泊位预测模型,实时预测并动态更新每个周期的剩余泊位数据包括以下步骤:
10、步骤s1:数据准备;将停车场的每日空余泊位数历史数据按照时间顺序和统计间隔规整为一个时间序列;以一个时间周期间隔为统计周期,统计每个统计周期内停车场的每日空余泊位数;将空余泊位数标记为ne;空余泊位数ne的计算方式为:ne=ne.0+nin-nout;其中,ne.0为初始时刻停车场内部的剩余泊位数;nin为统计时间段内停车场的驶入车辆数;nout为统计时间段内停车场的驶出车辆数;
11、步骤s2:划分训练集和测试集;将空余泊位数时间序列se={ne(1),ne(2),...,ne(k)}按照时间顺序划分为输入和输出;并根据输入和输出获得训练集d;其中,ne(t)为第t个统计间隔内的空余泊位数;t=1,2,3…k;
12、其中输入和输出的划分方式为:输入为时间周期k前nlag个统计周期内的空余泊位数序列,即:{ne(t-nlag),ne(t-nlag-1),...,ne(k-2),ne(k-1)};则模型的输出为第k个统计间隔的空余泊位数ne(k);其中,nlag根据实际经验设置;
13、其中训练集d={(x1,y1),(x2,y2),...,(xk,yk),...,(xn,yn)};其中,xk={ne(t-nlag),ne(t-nlag-1),...,ne(k-2):ne(k-1)},yk=ne(k);
14、步骤s3:数据归一化;
15、步骤s4:使用随机森林算法训练空余最佳泊位数预测模型;
16、步骤s5;将待预测时间段前nlag个统计间隔的空余泊位数时间序列输入到训练完成的随机森林的空余泊位数预测模型,得到未来时间段内的空余泊位数;
17、其中,所述数据归一化的方式为按最小-最大归一化方法将训练集和测试集中的空余泊位数进行归一化处理;
18、其中,所述使用随机森林算法训练空余泊位数预测模型包括以下步骤:
19、步骤p1:从空余泊位数训练数据集d中随机抽取样本集合di;其中,i为抽取次数;
20、步骤p2:利用di和cart算法训练决策树fd(x);
21、步骤p3:重复步骤p2,直至生成kd棵树;其中,kd为样本集合的数量;
22、步骤p4:最终的空余泊位数预测输出值为生成的所有决策树的预测输出值的平均值,即:
23、步骤p5:将待预测时间段前nlag个统计间隔的空余泊位数时间序列输入到训练完成的基于随机森林的空余泊位数预测模型,得到未来时间段内的空余泊位数;
24、其中,计算停车诱导屏到达邻近停车场的行程时间包括以下步骤:
25、步骤x1:计算停车诱导屏及待泊车辆到达停车场的路径集合;
26、具体的,计算路径集合的方式为:将城市路网区域抽象为具有p个节点和l条路径的图结构g={p,l};节点位置通常选取在重要的交叉口。那么第i个停车诱导屏到达第j个停车场的最短路径集合为:lij={l1,l2,...,lg},第p个待泊车辆到达第j个停车场的最短路径集合为:lrj={l1,l2,...,lh};最短路径通过dijkstra算法得到;
27、步骤x2:预测下一周期的区域内各路段的平均速度;
28、具体的,根据互联网路况数据或道路检测器获取路段的平均速度,得到城市区域路网中所有路段的平均速度集合v={v1,v2,v3,...,vl},其中,vl={vl(1),vl(2),...,vl(k-1)};
29、由于路段的平均速度具有时空关联性;即在时间维度上,某一路段下一时刻的平均速度与该路段之前时刻的平均速度密切相关;在空间维度上,某一路段的平均速度与其相邻路段的平均速度有关;
30、具体的,预测下一周期的区域内各路段的平均速度包括以下步骤:
31、步骤y1:计算时间相关性度量;采用acf自相关系数确定时间滞后阶数;
32、步骤y2:计算空间相关性度量;在空间维度上,假设目标路段的平均速度与上游相邻两个路段及下游相邻两个路段的平均速度有关,目标路段的平均速度序列为vl={vl(1),vl(2),...,vl(k-1)};相关路段的平均速度序列为:
33、vc={vc(1):vc(2),...,vc(k-1)},c=l-2,l-1,l+1,l+2;使用spearman秩相关系数来衡量路段平均速度之间的相关性;spearman秩相关系数的计算方法如下:
34、步骤z1:将序列vl和vc按照由大到小的顺序排列;
35、步骤z2:分别标记vl中的样本点vl(i)和vc中的样本点vc(i)所在位置,记为和则和分别为两个变量的秩数向量;
36、步骤z3:计算两个序列之间的秩次之差,d={d1,d2,...,di,...,dn};其中:
37、步骤z4:若d中无相同的秩次,则秩相关系数γ为:
38、
39、反之,秩相关系数γ为秩次之间的pearson相关系数,即:
40、
41、则与目标路段具有强空间相关性的路段为:目标路段与相邻路段平均速度序列的秩相关系数大于0.7的路段。我们将与目标路段具有空间相关性的路段集合标记为vlsc(k-1);
42、步骤y3:根据时空相关性度量结果确定路段平均速度预测模型的输入,即
43、步骤y4:采用随机森林算法训练路段平均速度预测模型,并根据实时接入的互联网路况数据预测每个周期目标路段的平均速度
44、步骤x3:计算下一周期停车诱导屏及待泊车辆到达停车场的平均行程时间;
45、下一周期停车诱导屏及待泊车辆到达停车场的平均行程时间为:最短路径集合中每条路径的平均行程时间与最短路径中包含的交叉口的停车延误之和,即:第i个停车诱导屏到达第j个停车场的行程时间tttij:
46、
47、第p个待泊车辆到达第j个停车场的行程时间tttkj:
48、
49、其中,hc为最短路径中包含的交叉口个数,td为每个交叉口的车辆平均延误时间;交叉口的车辆平均延误时间根据实际经验设置;
50、其中,建立个性化的停车泊位分配模型,为停车用户提供最合适的停车出行方案包括以下步骤:
51、步骤l1:构造目标函数;
52、具体的,目标函数为:第k个周期区域内所有待泊车辆的停车总成本c(k)最小,即:
53、
54、c(k)的计算方法如下:
55、c(k)=c1(k)+c2(k)+c3(k)
56、其中,c1(k)为从当前位置驾车至停车场的行驶时间成本,cpj,1(k)=tttpj(k)r1;其中,tttpj(k)为第k周期从当前位置驾车至停车场的行驶时间,r1为单位行驶时间成本;
57、c2(k)为从停车场到目的地的步行时间成本,cpj,2(k)=ttwpj(k)×r2;其中,ttwpj(k)为停车场到目的地的步行时间,r2为单位步行时间成本;
58、c3(k)为停车费用;停车费用根据每个停车场的实际收费标准有关;
59、综上,优化目标为:
60、
61、其中,upj(k)为停车场决策变量;upj(k)=0代表第p辆待泊车辆未选择第j个停车场,upj(k)=1代表第p辆待泊车辆选择第j个停车场;
62、步骤l2:构造约束条件;
63、包括空余停车泊位数约束以及路段通行能力约束;
64、空余停车泊位数约束包括:
65、当空余泊位数充足,即ne(k)>np;此时,所有待泊车辆均可以找到停车位,即:upj=1;
66、当空余泊位数有限时,即ne(k)≤np;此时,可能存在待泊车辆无法找到停车位的现象,即:upj<1;
67、此外,第k周期可分配泊位的待泊车辆总数应小于第k周期的空余泊位数,即:
68、路段通行能力约束包括:
69、待泊车辆的出行路径选择将影响路网的交通流量;为保证区域内的路网交通状态平衡,避免产生交通拥堵,每个路段的现状交通流量与待分配出行路径上的车辆数之和应小于路段的动态通行能力,即:
70、
71、其中,ql为路段l的现状交通流量,通过互联网路况数据得到;gpl(k)路径决策变量,gpl(k)=0代表待泊车辆p的停车路径中不包含路段l,gpl(k)=1代表待泊车辆p的停车路径中包含路段l;qc,l(k)为第k周期l路段的动态通行能力qg(k);
72、步骤l3:构造约束问模型如下:
73、
74、
75、步骤l4:使用优化问题求解算法求解约束模型。
76、与现有技术相比,本发明的有益效果是:
77、1、本发明通过接入互联网实时路况数据,实时预测下一时间段的路段行程时间,并将预测得到的行程时间结果实时反馈在停车诱导屏上,从而为出行者提供更加全面的出行信息;
78、2、本发明设置的停车诱导屏具备邻近停车场的位置信息、空余泊位和行程时间信息,且空余泊位和行程时间信息是实时动态更新的优点。
- 还没有人留言评论。精彩留言会获得点赞!