一种非精密进近航线的生成方法、系统、设备及介质与流程
本发明涉及航空,具体而言,涉及一种非精密进近航线的生成方法、系统、设备及介质。
背景技术:
1、进近是指飞机着陆前下降并对准跑道飞行的过程,在进近阶段,要使飞机调整高度、对准跑道,从而避开地面障碍物,飞行员必须注意力高度集中才能准确操作,因此在进近阶段对飞行进行引导或控制极为重要。
2、在现有技术中有多种引导控制飞行器完成进场的方案,例如可以基于faf圆对飞行器完成进场引导,并分区域、分条件给出了控制飞机方向舵和副翼偏转角指令公式,以完成引导飞行器自动对准跑道的方案。但是其涉及的计算原理较为复杂,且是通过控制飞机方向舵和副翼进行相应动作,以完成进近飞行,只适合于无人机。对于有人机来说,若是能够提供一种简单高效的进近航线生成方案,能够辅助飞行员对飞行器进行操纵,则能安全而高效地完成进近着陆,大大降低着陆安全风险。
技术实现思路
1、本发明的目的在于提供一种非精密进近航线的生成方法、系统、设备及介质,其能够快速准确的生成非精密进近着陆航线,以便飞行员在进近着陆时导航参考用。
2、本发明是这样实现的:
3、第一方面,本技术提供一种非精密进近航线的生成方法,包括以下步骤:
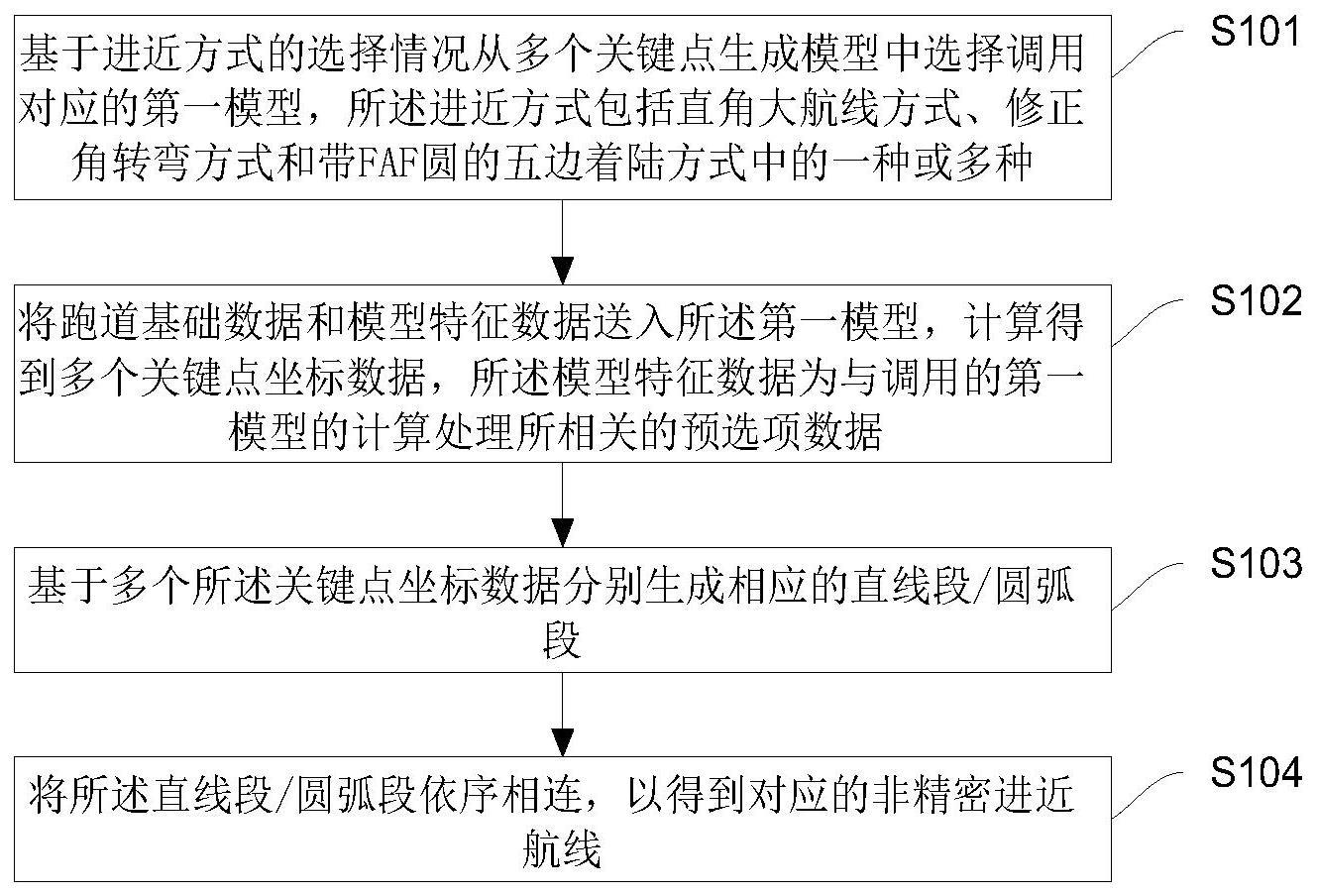
4、基于进近方式的选择情况从多个关键点生成模型中选择调用对应的第一模型,上述进近方式包括直角大航线方式、修正角转弯方式和带faf圆的五边着陆方式中的一种或多种;将跑道基础数据和模型特征数据送入上述第一模型,计算得到多个关键点坐标数据,上述模型特征数据为与调用的第一模型的计算处理所相关的预选项数据;基于多个上述关键点坐标数据分别生成相应的直线段/圆弧段;以及将上述直线段/圆弧段依序相连,以得到对应的非精密进近航线。
5、第二方面,基于第一方面的方案,本技术提供一种非精密进近航线的生成方法,包括以下步骤:
6、响应于进近方式的选择情况为选择直角大航线方式,从多个关键点生成模型中选择调用对应的第二模型。上述第二模型根据跑道基础数据和第一模型特征数据,计算得到用于构建平面进近航线的多个第一关键点坐标数据;上述第二模型根据跑道基础数据和第二模型特征数据,计算得到用于构建进近航段垂直航线的多个第二关键点坐标数据。基于多个上述第一关键点坐标数据分别生成相应的直线段/圆弧段,并将上述直线段/圆弧段依序相连,以得到平面进近航线;以及基于多个上述第二关键点坐标数据分别生成相应的直线段,并将上述直线段依序相连,以得到进近航段垂直航线。基于上述平面进近航线和上述进近航段垂直航线,得到对应的非精密进近航线。
7、进一步地,基于前述方案,上述第一模型特征数据包括:着陆方向选择信息、左右航线选择信息、一转弯前平飞距离、一转弯半径、二转弯半径、切台后平飞距离、三转弯半径、四转弯半径和导航台距离;上述第一关键点坐标数据包括:进近远台坐标、一转弯起始点坐标、二转弯改平点坐标、三转弯起始点坐标、三转弯改平点坐标、四转弯起始点坐标和四转弯改平点坐标。上述第二模型特征数据包括:五边起始高度、faf距离、faf高度、mapt距离、mapt高度、最低下降高度、台前平飞距离和台前平飞速度;上述第二关键点坐标数据包括:跑道头坐标、mapt坐标、faf点坐标和台前开始平飞点坐标。
8、进一步地,基于前述方案,上述计算得到用于构建平面进近航线的多个第一关键点坐标数据的步骤中所涉及的坐标计算公式包括:
9、
10、
11、其中,为起点经度值,λ1是起点纬度值,为终点经度值,λ2是终点纬度值,s是距离;hx是当前航段的方位角。
12、第三方面,基于第一方面的方案,本技术提供一种非精密进近航线的生成方法,包括以下步骤:
13、响应于进近方式的选择情况为选择修正角转弯方式,从多个关键点生成模型中选择调用对应的第三模型。上述第三模型根据跑道基础数据和第三模型特征数据,计算得到多个第三关键点坐标数据;其中,上述第三模型特征数据包括:着陆方向选择、左右航线选择、iaf距离、转弯真速、转弯坡度和五边距离;上述第三关键点坐标数据包括:转弯导航台坐标、转弯起始点坐标、转弯改平点坐标和跑道头坐标。基于多个上述第三关键点坐标数据,生成相应的直线段/圆弧段,并将上述直线段/圆弧段依序相连,以得到修正角转弯方式下的非精密进近航线的平面进近航线。
14、第四方面,基于第一方面的方案,本技术提供一种非精密进近航线的生成方法,包括以下步骤:
15、响应于进近方式的选择情况为选择带faf圆的五边着陆方式,从多个关键点生成模型中选择调用对应的第四模型。上述第四模型根据跑道基础数据和第四模型特征数据,计算得到多个第四关键点坐标数据;其中,上述第四模型特征数据包括:着陆方向选择、五边长度、faf圆半径和左右faf圆选择;上述第四关键点坐标数据为五边起始点的坐标数据。基于多个上述第四关键点坐标数据,生成相应的直线段/faf圆,并将上述直线段/faf圆依序相连,以得到带faf圆的五边着陆方式下的非精密进近航线的平面进近航线。
16、第五方面,本技术提供一种非精密进近航线的生成系统,其包括:
17、模型选择调用模块,被配置为:基于进近方式的选择情况从多个关键点生成模型中选择调用对应的第一模型,上述进近方式包括直角大航线方式、修正角转弯方式和带faf圆的五边着陆方式中的一种或多种。关键点坐标获取模块,被配置为:将跑道基础数据和模型特征数据送入上述第一模型,计算得到多个关键点坐标数据,上述模型特征数据为与调用的第一模型的计算处理所相关的预选项数据。关键点处理模块,被配置为:基于多个上述关键点坐标数据分别生成相应的直线段/圆弧段。进近航线生成模块,被配置为:将上述直线段/圆弧段依序相连,以得到对应的非精密进近航线。
18、第六方面,本技术提供一种非精密进近航线的生成系统,其包括:
19、输入模块,用于接收用户的输入,以得到进近方式的选择情况。存储模块,用于存储目标机场的跑道基础数据和模型特征数据。包括第一处理单元和第二处理单元的处理模块,其中,第一处理单元,用于响应航线生成指令,基于进近方式的选择情况从多个关键点生成模型中选择调用对应的模型,以及从存储模块中调用对应的跑道基础数据和模型特征数据,并送入对应的模型中,计算得到多个关键点坐标数据;第二处理器单元,用于根据多个上述关键点坐标数据分别生成相应的直线段/圆弧段,并将上述直线段/圆弧段依序相连,以得到对应的非精密进近航线。显示模块,用于在背景地图上显示上述非精密进近航线。
20、第七方面,本技术提供一种电子设备,包括至少一个处理器、至少一个存储器和数据总线;其中:上述处理器与上述存储器通过上述数据总线完成相互间的通信;上述存储器存储有被上述处理器执行的程序指令,上述处理器调用上述程序指令以执行如上述第一方面至第四方面中任一项所述的方法。
21、第八方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述第一方面至第四方面中任一项所述的方法。
22、相对于现有技术,本发明至少具有如下优点或有益效果:
23、基于以关键点将非精密进近航线进行分段的思路,通过在选择的进近方式下,利用跑道基础数据和对应的模型特征数据进行求解关键点坐标数据,以根据这些关键点坐标数据生成相应的直线段/圆弧段,从而在将这些直线段/圆弧段依序相连后,即可得到对应的非精密进近航线。即,该方案中通过提出以模型确定关键点,然后再以关键点绘制线段后,将线段进行组合,得到完整的进近航线的思路,能够快速准确的生成非精密进近着陆航线,以便飞行员在进近着陆时导航参考用。
- 还没有人留言评论。精彩留言会获得点赞!