一种网联环境下城市道路应急车辆优先控制方法
本发明属于智能交通和交通信息及控制系统领域,涉及应急车辆优先控制,更具体地说,涉及一种网联环境下城市道路应急车辆优先控制方法。
背景技术:
1、应急车辆的快速响应和及时到达对于拯救生命财产具有至关重要性的意义。有研究表明:在英国伦敦对重症患者快速及时的救护,每年可多挽救250人的生命。由于缩短救援时间的重要性,各国政府通常会设定救援响应时间目标。例如,根据美国环境管理体系法所确定的标准,在城市地区95%的紧急请求应10分钟内提供。许多国家允许应急车辆优先通行的权利,如我国交通安全法规定警车、消防车、救护车等执行紧急任务时,在确保安全的前提下,不受行驶路线、行驶方向、行驶速度和信号灯的限制。虽然政府在缩短应急车辆响应时间方面做出来许多努力,但应急车辆的快速响应仍面临一些问题,例如:应急车辆优先通行时,安全问题较为突出,在救援过程中会发生包括撞车、翻车等事故。此外,随着汽车拥有量急剧增加,城市交通拥堵问题严重,虽然规定普通车辆必须为应急车辆让路,但缺乏足够的空间为应急车辆让行,导致优先效果不佳。据统计,美国纽约市的应急车辆平均行驶时间从2015年的7.2分钟增加到2021年的10.1分钟。因此,提高应急车辆的效率、可靠性和安全性并减少对日常交通的不利影响迫在眉睫。
2、应急车辆优先控制的研究,主要分为交叉口信号优先控制和路段优先通行两类。应急车辆交叉口信号优先的研究较多,其关键问题包括优先控制方法以及应急车辆优先对整个交通流的影响,研究学者提出多种控制方法。如:qin等(2012)提出了两种应急车辆信号优先控制策略,当检测到应急车辆时,信号从正常状态转换为应急车辆信号优先模式,当应急车辆通过交叉口时,通过最优控制模型将信号切换回正常状态(论文题目:controlstrategies of traffic signal timing transition for emergency vehiclepreemption);cao等(2019)提出了以应急车辆为中心的交通信号控制策略,控制策略侧重于发挥应急车辆性能,确保应急车辆快速通过交叉口,同时将对其他车辆的负面影响降到最低(论文题目:emergency vehicle-centered traffic signal control inintelligent transportation systems)。
3、路段优先控制的研究,主要考虑清空应急车辆前方路段的普通车辆,从而减少应急车辆在路段上的响应时间。但当路段上交通拥堵时,应急车辆所在车道上普通车辆很难快速清空。随着车联网、v2x等技术的发展,为主动清空应急车辆前方的普通车辆提供技术支持。zhao等(2020)通过建立城市道路交通流应急车辆元胞自动机模型,分析网联环境下应急车辆的交通特性,结果表明,车联网能够提高道路的通行能力和平均速度,有利于应急车辆的快速通行(论文题目:cellular automata model for urban road traffic flowconsidering internet of vehicles and emergency vehicles);osman等(2021)基于车车通信技术,提出了一种紧急车辆路线清空策略,应急车辆快速找到最近且能通信的普通车辆,发出应急信息,所有车辆收到信息后为应急车辆让行(论文题目:novel roadtraffic management strategy for rapid clarification of the emergency vehicleroute based on v2v communications);nguyen等(2021)提出了一种路径规划和路段清空相结合的调度方案,首先,搜索到达救援点的所有候选路径,根据路段清空时间确定最快的驾驶路径。最后,优化所选路线中交叉口的信号配时,协调交通流并使紧急车辆顺利通行(论文题目:controllable path planning and traffic scheduling for emergencyservices in the internet of vehicles);
4、应急车辆优先控制的研究已经取得了较多的成果,尤其是在信号优先方面。但仍存在一些问题未被解决:信号优先控制大多针对单辆应急车辆到达交叉口的情况,较难处理多辆应急车辆从冲突相位到达交叉口的情况,多辆应急车辆同时到达极有可能发生碰撞事故。针对多辆应急车辆同时到达交叉口的问题,cao等(2022)提出了解决办法,基于深度强化学习技术控制应急车辆的交通信号,提出控制算法解决多个应急车辆同时从冲突方向通过交叉口时的快速应急响应问题,并减轻对交通效率的负面影响(论文题目:a gainwith no pain:exploring intelligent traffic signal control for emergencyvehicles)。但是,交通拥堵导致到达交叉口的时间很难提前准确预测和估计,应急车辆行程时间不确定可能导致信号优先策略失效。wu等(2020)通过双层规划模型将紧急车辆前方划分多个区块,提出了车联网环境下应急车道的预清空策略和应急车辆排序算法(论文题目:emergency vehicle lane pre-clearing:from microscopic cooperation torouting decision making),但研究仅针对路段,没有与交叉口优先结合。
5、综上所述,应急车辆优先的研究中,已有文献大多仅考虑一辆应急车辆的优先通行,控制方案很难适用于多辆应急车辆同时到达交叉口的情况。多辆应急车在交叉口存在碰撞风险。针对多辆应急车的研究仅考虑交叉口的信号配时优化,没有与路段应急车道清空相结合。由于路段拥挤,应急车辆所在路段难以有效清空,到达的存在不确定性,可能导致应急车辆交叉口信号优先失效。网联自动驾驶技术的发展为解决这些问题提供了新的研究思路和技术支持。在网联自动驾驶环境下,根据应急车辆发送的位置、速度和行驶方向等信息,实时规划社会车辆和应急车辆的行驶轨迹,为应急车辆创造更多通行空间,使其尽快通过拥挤的路段。同时,结合路段的行驶状态优化多辆应急车辆进入交叉口的时间,能消除在交叉口的碰撞风险。
技术实现思路
1、技术问题:针对现有应急车辆优先控制的不足,本发明的目的是提供一种网联环境下城市道路应急车辆优先控制方法,在智能网联环境下,同时考虑交叉口和路段的应急车辆优先,交叉口采用无信号控制,计算应急车辆进入交叉口的时间,规划普通车辆和应急车辆在路段上的行驶轨迹,降低普通车辆对应急车辆的干扰,提高应急车辆的救援效率。
2、技术方案:为解决上述技术问题,本发明的网联环境下城市道路应急车辆优先控制方法,包括如下步骤:
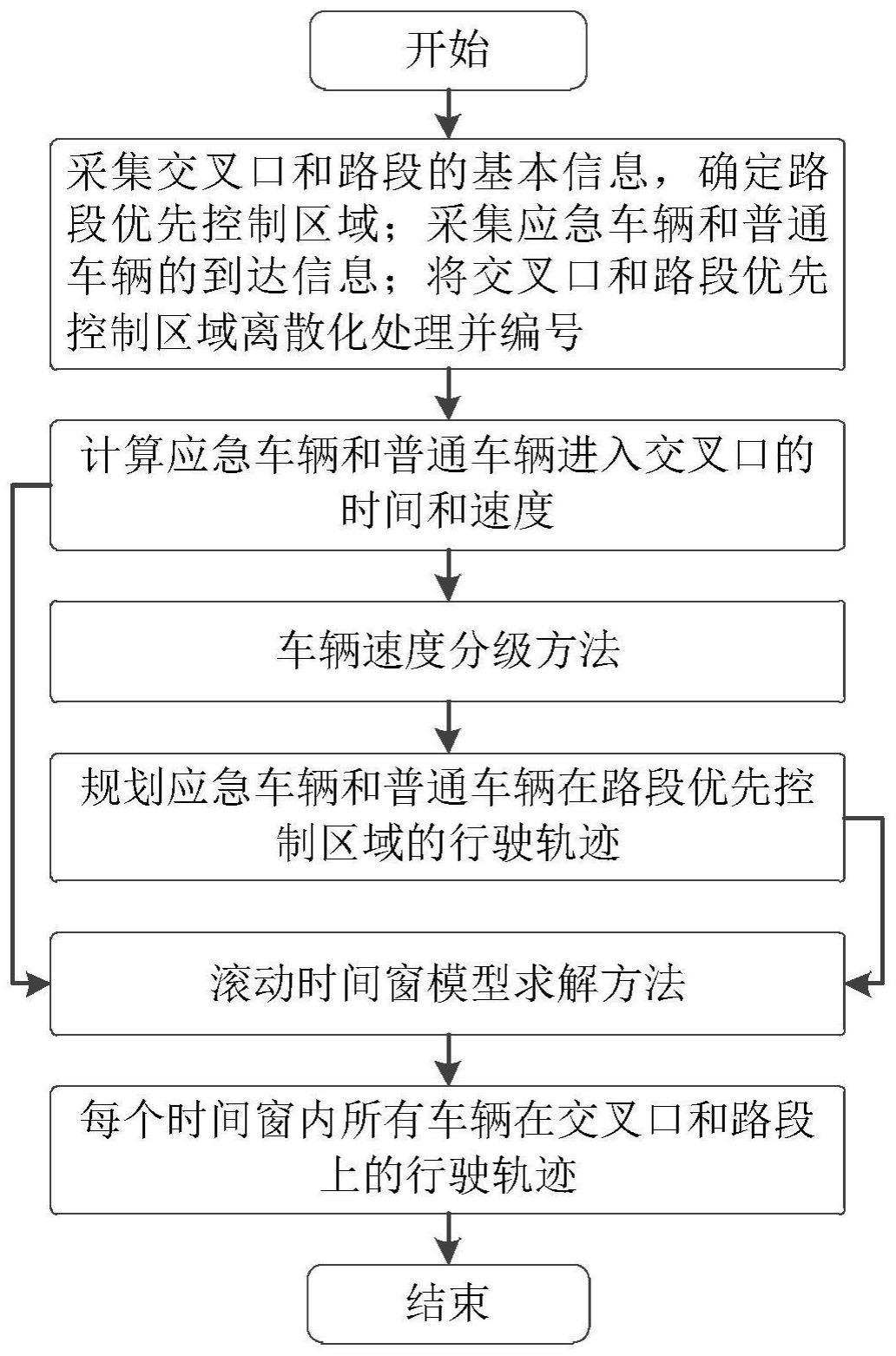
3、步骤1:采集交叉口和路段的基本信息,包括各进口方向的车道数、车道宽度,确定路段优先控制区域;采集应急车辆和普通车辆到达路段优先控制区域的时间、进入的车道、在交叉口的转向,按匀速行驶确定到达交叉口的理论时间;将交叉口和路段优先控制区域离散化处理并编号;
4、步骤2:计算应急车辆和普通车辆进入交叉口的时间和速度;
5、步骤3:通过车速分级方法衔接交叉口和路段轨迹;
6、步骤4:规划应急车辆和普通车辆在路段优先控制区域的行驶轨迹,包括横向轨迹和纵向轨迹;
7、步骤5:设计滚动时间窗方法模型求解方法;
8、本发明中,步骤2中的计算应急车辆进入交叉口时间的方法,包括如下步骤:
9、步骤21:根据车辆到达交叉口的理论时间,规划车辆进入交叉口的时间和速度,避免冲突发生;考虑到应急车辆和普通车辆优先级不同,对应急车辆和普通车辆赋予不同的权重,以应急车辆和所有普通车辆总延误的加权和最小为目标,如公式(1)所示:
10、min(p1·∑e∈evdelaye+p2·∑i∈idelayi)(1)
11、式中:p1和p2分别表示应急车辆和普通车辆的权重,p1>>p2;delayi表示普通车辆i的延误;delaye表示应急车辆e的延误;ev表示到达交叉口的应急车辆集合;i表示普通车辆的集合;
12、车辆i的延误为车辆进入交叉口的时间和车辆理论到达交叉口时间的差值,由公式(2)计算:
13、
14、式中:ti表示车辆i进入交叉口的时间,t′i表示车辆i理论到达交叉口的时间;
15、步骤22:根据交叉口渠化,左转车辆选择最内侧车道、直行车辆选择中间车道、右转车辆选择最外侧车道进入交叉口;车辆在到达交叉口前根据转向确定进入交叉口的车道,当车辆确定通行路径后,由公式(3)确定车辆在交叉口内部的路径上经过哪些网格;
16、
17、式中:σi,g为二元变量,σi,g=1表示车辆i经过网格g,否则σi,g=0;τi,r为二元变量,τi,r=1表示车辆i从路径r通过交叉口,否则τi,r=0;为二元参数,表示网格g在路径r上,否则r表示路径集合;g表示交叉口内部所有网格的集合;
18、步骤23:当车辆i和j需要经过同一个网格时,后车进入网格的时间小于前车离开网格的时间,通过计算车辆进入交叉口的时间和速度,避免车辆在相同的时间占用同一个网格,以此避免车辆间的冲突,约束如公式(4)-(5)所示:
19、
20、
21、式中:θ表示交叉口内车辆最小车头时距;ti,g和t′i,g分别表示车辆i进入网格g的时间和离开网格g的时间;yi,j为二元变量,yi,j=1表示车辆j先于车辆i进入同一个网格,否则yi,j=0;m为大的正整数;
22、车辆进入交叉口前可能需要停车,当车辆进入交叉口前停车时,进入交叉口时间ti与理论到达时间ti′约束如公式(6)所示:
23、
24、式中:ti表示车辆进入交叉口的时间;t′i表示车辆理论到达交叉口的时间;ρv,i为二元变量,ρv,i=1表示车辆i以初始速度v进入交叉口,否则ρv,i=0,ρ0,i为ρv,i中初始速度v=0m/s的情况;
25、每辆车进入网格的时间ti,g和驶出网格的时间t′i,g等于车辆进入交叉口的时间ti和在0时刻以初始速度v进入交叉口后,以amax的最大加速度加速,进出各网格的时间之和,如公式(7)-(8)所示:
26、
27、
28、式中:和分别表示车辆以速度v进入交叉口,进入网格的时间和离开网格的时间;v表示车辆进入交叉口速度的可调节范围集合;进入交叉口后以固定加速度加速或匀速行驶,车辆在交叉口内部不允许停车;
29、本发明中,步骤3中,车辆速度分级方法有效衔接交叉口和路段轨迹规划,包括如下步骤:步骤31:在信号控制交叉口,通过信号配时分离不同相位的车辆冲突。车辆在绿灯时以任意速度进入交叉口,均能安全通过,因此无需考虑车辆从路段进入交叉口的速度。在无信号控制交叉口,相互冲突的车辆交叉口内部分离冲突,需计算车辆进出每个网格的时间,通过约束同一网格在同一时间只能被一辆车占据确保车辆安全。路段上的行驶速度不确定则无法确定进入交叉口冲突区域的时间,因此无法确定车辆在交叉口内部内个网格的时间,则无法实现车辆在交叉口内部的冲突分离。该问题由于速度为连续变量导致,连续变量有无数多个取值,导致规划问题的解空间无穷大。因此,针对该问题,本发明提出车辆速度分级方法,将车辆进入交叉口的速度离散化为有限个取值,以v表示速度离散的集合,v={0,…,vm}。首先计算以每个速度进入交叉口后进入网格的时间和驶出网格的时间,然后以交叉口延误最小为目标同时优化每辆车进入交叉口的初始速度和时间,每辆车以某一确定速度进入交叉口,满足公式(9)约束:
30、∑v∈vρv,i=1 (9)
31、式中:ρv,i为二元变量,ρv,i=1表示车辆i以初始速度v进入交叉口,否则ρv,i=0;vm表示最大车速。
32、本发明中,步骤4中规划应急车辆和社会车辆在路段上行驶轨迹的方法,包括如下步骤:
33、步骤41:将路段优先控制区域离散化分为若干网格,分别以应急车辆的长度de和普通车辆的长度di为依据,确定网格长度分别为de和di,de=2·di;应急车辆和普通车辆所在网格x位置编号分别为{1..l/de}和{1..l/di},l表示路段优先控制区域长度;路段轨迹规划中以普通车辆和应急车辆在路段上行驶时间加权和最小为目标,如公式(10)所示:
34、
35、式中,p1和p2分别表示应急车辆和普通车辆的权重,p1>>p2;为二元变量,表示车辆i在第k步向前行驶,否则ki和ke分别表示普通车辆和应急车辆在路段上的行驶步数;δt表示每步的时间步长;o表示交叉口各方向,o∈{e,w,s,n};e,w,s,n表示东西南北四个方向;
36、步骤42:应急车辆在te时刻进入路段优先控制区域,进入路段优先控制区域前不会占用路段上的网格,满足公式(11)约束;te时刻占据第一个网格,约束如公式(12)所示
37、
38、
39、式中:为二元变量,表示应急车辆e第k步在x位置,否则为二元变量,表示应急车辆e第k步在y车道,否则δt表示时间步长;le表示应急车辆e的初始车道;te表示应急车辆e进入路段优先控制区域的时刻;de表示针对应急车辆长度在路段优先控制区域划分网格的长度;yo表示o方向进口车道的集合;
40、规定应急车辆e在te进入交叉口时到达停车线,则te时刻在目标车道le上,且在路段上最后一个网格,满足公式(13)约束:
41、
42、式中:le表示应急车辆e的目标进口车道;te表示应急车辆进入交叉口的时刻;
43、在每一步内,应急车辆的轨迹应具有连续性,不能跳过某一网格,为确保应急车辆轨迹的连续性,车辆e第k步在x位置,k步内连续经过me,k个网格,约束如公式(14)-(16)所示:
44、
45、
46、
47、式中:表示第k步开始前,车辆累计经过的网格数;me,k表示应急车辆e在k步内连续经过的网格;te表示应急车辆进入路段优先控制区域的时间;te表示应急车辆e进入交叉口的时间;
48、第k步开始前,应急车辆e已经经过的网格数由公式(17)计算,所有步行驶经过的网格数之和等于网格总数,满足公式(18)约束;
49、
50、
51、步骤43:对于普通车辆,纵向轨迹规划约束与应急车辆的约束(11)-(18)一致;但普通车辆如果受前车影响,车辆i第k步无法向前移动,即mi,k=0,约束如公式(19)所示:
52、
53、式中:mi,k表示普通车辆i在k步内连续经过的网格;ti表示普通车辆进入路段优先控制区域的时间;ti表示普通车辆进入交叉口的时间;
54、每一步开始计算前,根据之前经过的网格判断普通车辆是否已经驶出路段优先控制区域,车辆i第k步最多向前移动的距离满足公式(20)约束;
55、
56、式中:di表示根据普通车辆长度划分的路段优先控制区域网格长度;
57、步骤44:应急车辆和普通车辆遵循同样的横向轨迹约束;每一步只能换道相邻车道,车辆i第k步在车道b,即且在第k步换道,即则第k+1步车辆所在车道,即或满足公式(21)约束,当时,第k+1步车辆所在车道,即满足公式(22)约束:
58、
59、
60、式中:为二元变量,表示车辆i第k步在y车道,否则为二元变量,表示车辆i第k步换道,否则mo表示o进口方向的进口车道数;
61、每一步车辆只能在一条车道上,满足公式(23)约束:
62、
63、步骤45:根据车辆在x方向行驶和y方向所在车道,能够确定车辆每一步经过哪些网格,由公式(24)-(26)确定:
64、
65、
66、
67、式中:为二元变量,表示车辆i第k步在经过网格(x,y),否则
68、考虑到应急车辆和普通车辆的长度不同,在离散化路段优先控制区域时分别为应急车辆和普通车辆划分网格,在安全约束中,以普通车辆网格为依据,需要将应急车辆占据网格映射到根据普通车辆长度划分的网格,如公式(27)所示:
69、
70、然后,通过要求每个网格在任何时候被不超过一辆车辆占用来保证关键冲突区域和局部关键区域的安全,满足公式(28)约束;
71、
72、本发明中,步骤5,滚动时间窗的求解方法,包括如下步骤:
73、步骤51:本发明采用滚动时间窗的方法,根据车辆进入路段优先控制区域的时间划分时间窗,分时间窗为车辆规划行驶轨迹;在交叉口中,以n+1时间窗内任一车辆进入网格的时间大于等于n时间窗内所有车辆中最晚离开网格的时间为安全约束,确保不同时间窗之间的车辆不会发生冲突,交叉口的安全约束如公式(29)所示;
74、
75、式中:in表示第n个时间窗内所有进口方向的车辆集合;ti′,g表示第n+1个时间窗内的车辆i′进入网格的时间,i′∈in+1;t′i,g表示第n个时间窗内的车辆i离开网格的时间,i∈in;in表示第n个时间窗内的车辆集合;σi,g为二元变量,σi,g=1表示车辆i经过网格g,否则σi,g=0;g表示交叉口内部所有网格的集合;
76、步骤52:在路段上,n和n+1两个时间窗内所有车辆在相同k步占据网格个数之和小于等于1,路段的安全约束如公式(30)所示:
77、
78、式中:io,n表示第n个时间窗内o进口方向的车辆集合;表示第n个时间窗计算结束,车辆i第k步经过路段上网格(x,y)的情况,作为第n+1个时间窗的输入参数;为二元变量,表示车辆i第k步在经过网格(x,y),否则第n个时间窗计算结束导出数据,作为第n+1个时间窗的输入数据;l表示路段优先控制区域长度;yo表示o方向进口车道的集合;ev表示到达交叉口的应急车辆集合;ti表示车辆进入路段优先控制区域的时间;ti表示车辆进入交叉口的时间;δt表示时间步长。
79、有益效果:本发明与现有技术相比,具有以下优点:
80、区别于现有应急车辆的研究大多针对单辆应急车辆优化信号配时方法不同,本发明在网联环境下,采用交叉口采用无信号控制,计算应急车辆进入交叉口的时间。针对多辆应急车辆同时到达,考虑应急车辆的优先级,以所有车辆延误的加权和最小为目标,在无信号控制交叉口,建立模型计算进入交叉口的时间。确保多辆应急车辆在交叉口内部的行车安全,同时降低应急车辆优先通行对普通车辆的负面影响;
81、区别于现有研究大多将交叉口信号优先和路段清空单独考虑的不同,本发明将交叉口控制和路段控制相结合,根据应急车辆进入交叉口的时间,建立路段上多车协同轨迹规划模型。在路段上,以所有车辆行驶时间加权和最小为目标,集中规划应急车辆和普通车辆的行驶轨迹,为应急车辆在路段行驶创造空间,确保应急车辆能够在进入交叉口的时间及时到达交叉口。
- 还没有人留言评论。精彩留言会获得点赞!