本发明涉及一种用于警告给定路段中易受伤害的道路使用者的警报系统,该警报系统包括用于接收关于该路段的检测到的道路使用者的多个运动数据的具有通信接口的接收单元。
背景技术:
1、避免碰撞是所有车辆(比如汽车、卡车、摩托车)驾驶员行驶到期望的目的地的基本要求。现有技术已披露借助于传感器(例如车载雷达系统)检测到其他车辆来引起车辆使用者注意到附近存在车辆的做法。然而,这种系统限于识别在传感器范围内(典型地在几个车辆长度内)的其他车辆。
2、然而,也已经有一些方法涉及用于路段的通用系统,以增加道路网络的安全性。
3、因此,us 9,659,496 b2披露了一种用于增加道路网络的安全性的方法和系统,该系统包括:交互检测器,该交互检测器具有通信接口,该通信接口用于接收在道路网络中移动的第一辆车和第二辆车的多个监测矢量;
4、交互风险模块,该交互风险模块被设计为基于多个监测矢量来确定第一车辆与第二车辆之间是否存在交互,其中该交互是在不使用关于在道路网络中第一车辆和第二车辆中的每个车辆的预先规划路线的先验知识的情况下确定的;以及消息生成器,该消息生成器被设计为响应于交互风险模块确定交互而为至少第二车辆生成消息,并且经由通信接口将该消息传输到第二车辆。
技术实现思路
1、因此,本发明的目的是规定一种改进的、通用的、独立于车辆的警报系统,该警报系统用于警告给定路段中易受伤害的道路使用者。
2、这个目的是通过一种用于警告给定路段中易受伤害的道路使用者的警报系统来实现的,
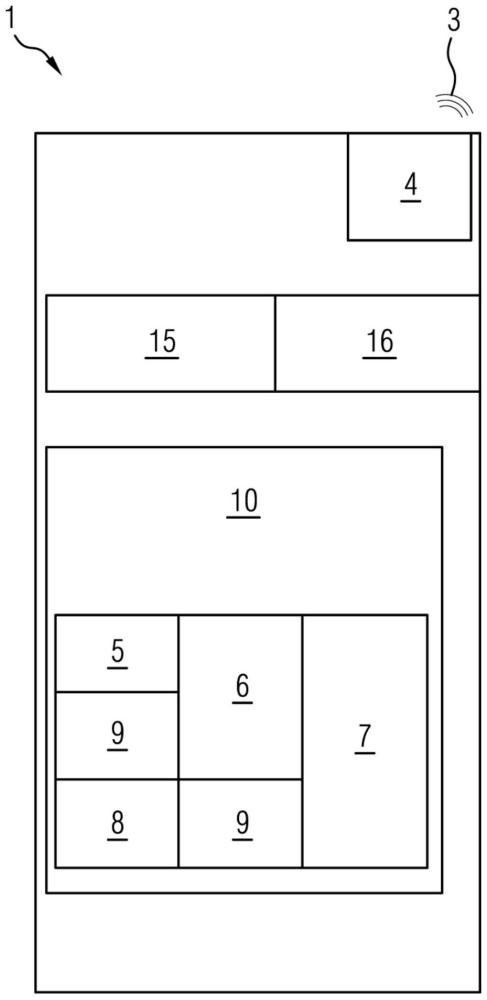
3、该警报系统包括具有通信接口的接收单元,用于接收关于该路段的检测到的道路使用者的多个运动数据,其中,
4、提供存储单元,该存储单元具有预测质量递减的至少三个或更多个预测模块,第一预测模块被设计为如果满足特定第一条件则对检测到的道路使用者的位置进行至少一次预测,第二预测模块被设计为如果不满足第一条件而仅满足特定第二条件则对检测到的道路使用者的位置进行至少一次预测,并且第三预测模块被设计为如果不满足第一条件和第二条件则对检测到的道路使用者的位置进行至少一次预测,并且其中,
5、提供检查模块,该检查模块被设计为检查关于路段和道路使用者是否满足第一条件或第二条件或第三条件,并且按质量递减的顺序并取决于满足的条件来选择具有最高预测质量的预测模块,并且其中,
6、提供处理器,该处理器被设计为基于所选的预测模块来至少预测检测到的道路使用者的未来位置。
7、路段可以是当前路段(位置),或者可以将一个路段用作其他路段的代表,例如足够类似的环岛/交叉口等。
8、在这种情况下,路段可以包括道路网络的各个段、或多个道路。
9、特别地,第一条件包括第二条件。
10、在这种背景下,警报系统可以布置在路段中的基础设施元件(例如交通灯)上,或者例如实施在云或边缘云等中。
11、举例来说,运动数据可以包括由车辆本身记录的传感器数据,例如来自前方周围,或者由记录整个路段的相机系统记录的传感器数据。举例来说,这些相机系统可以布置在交通灯中。借助于传统的提取方法,可以从这些传感器数据中提取道路使用者以及与其相关联的运动数据(轨迹)。在这种背景下,这些传感器数据优选地被实时地传输和评估。例如,可以从提取的传感器数据创建道路使用者的先前短的运动轨迹作为运动数据。
12、根据本发明,人们认识到,仅使用非常简单的方法对一种状况是否具有潜在危险进行当前评估构成一个重大问题。因此,仅使用道路使用者的当前位置、或者对当前运动矢量/运动轨迹执行简单推断/外推。然而,这导致问题,即在危险状况的情况下,当道路使用者已经(太)接近时才输出警告。然而,这个很晚的警告意味着,道路使用者无法再做出反应、或者仅可以在非常困难的情况下做出反应,从而状况可能变得更加严重(紧急制动、不正确的规避动作)。
13、作为另一问题,简单且仅仅推断运动矢量进一步只能实现非常不准确的预测。这导致大量不必要触发的警告,可能促使使用者/车辆使用者停用这种警告系统,或者太频繁地不必要地分散车辆使用者对道路交通的注意力,这本身可能造成危险状况。
14、这些问题现在通过根据本发明的警报系统来纠正。藉由根据本发明的警报系统,可以非常可靠地识别道路使用者的未来位置。结果,随后可以更可靠地识别潜在的危险状况。
15、因此,提供了具有不同的、递减的预测质量的至少三个预测模块,并且这些预测模块基于当前适用于路段和道路使用者的条件提供了可靠的预测。
16、在这种背景下,人们认识到,具有不同预测质量的不同预测模块各自要求不同的假设/条件。在这种背景下,递减意味着,第一预测模块具有比第二预测模块更高的预测质量,第二预测模块具有比第三预测模块更高的预测质量。
17、通过根据本发明的警报系统,始终采用具有最高预测质量的预测模块-在这种情况下为具有第一条件的第一预测模块-并且,如果由于不满足第一条件而无法做到这一点,则采用具有较少条件的预测模块-在这种情况下为具有第二条件的第二预测模块-并且如果第一条件和第二条件都不满足,才采用第三预测模块。取决于这个路段的现存的条件,这始终针对这个路段产生具有最高预测质量的预测。结果,与现有技术相比,可以更准确地且以更大概率预测道路使用者的位置,从而也可以更好地且以更高概率确定未来的危险状况。
18、在另一实施例中,预测质量至少包括道路使用者的未来位置的发生的概率和/或准确度。如果无法确定发生的概率,则可以大致估算。进一步地,还可以涵盖其他预测质量,比如分辨率和预测时长。特别地,预测模块被设计为在最多5秒的时长内尽可能可靠地预测道路使用者的位置。如果现在以相关联的概率和准确度以例如分辨率为200ms且预测范围为5s已知道路使用者的未来位置,则由此可以更准确且更可靠地确定潜在的未来危险状况。
19、在另一实施例中,运动数据至少包括在短时间段内(尤其是在截至当前时间的刚刚经过的时间段内)道路使用者的当前和先前位置、速度和方向。在这种情况下,可以借助于布置在车辆上的传感器、无人机、或对应的交通管理系统(例如交通灯)中的相机/传感器来容易和可靠地实时检测传感器数据,并且可以从这些传感器数据中识别运动数据作为提取的道路使用者轨迹。
20、在另一设计方案中,运动数据包括来自其他数据源的数据,这些数据源用于在相关路段中引导交通。因此,警报系统可以使用其他数据源,只要这些数据源是可用的。因此,例如可以通过使用比如当前和未来交通灯切换等数据来进一步改进运动数据的预测或准确度。
21、在另一设计方案中,第一预测模块包括针对该路段或足够类似路段的训练的人工神经网络以及针对相关路段的hd(高清晰度)地图作为第一条件,其中第一预测模块被设计为基于训练的人工神经网络使用该道路使用者的运动数据和hd地图来进行针对该路段的第一道路使用者的预测。结果,可以进行非常精确的预测。在这种情况下,hd地图是一种高分辨率、高清晰度的地图,该地图包括当前的现实图像,其包括护栏、树木、沟渠和其他与交通相关的物体,比如人行道和人行横道。
22、使用hd地图中道路使用者的当前位置,将运动数据输入到训练的人工神经网络中,这提供了关于道路使用者的非常准确的预测。在这种情况下,在这种预测方面的训练的人工神经网络特别是已经借助于历史数据进行训练,使得可以进行准确的预测。
23、在另一实施例中,仅针对关于特定道路使用者及其未来位置的特殊情况来训练人工神经网络。举例来说,这些特殊情况可以是关于车辆将转弯还是直行的预测。应用于特殊情况的有利之处是训练所需的历史数据较少,因为尤其是针对机器学习方法的应用而言可用的数据量构成限制。
24、在另一实施例中,第二预测模块包括针对该路段的hd地图作为其第二条件,其中第二预测模块被设计为使用道路使用者的运动数据、基于针对该路段的hd地图来进行关于该路段的道路使用者的预测。
25、如果针对该路段或类似路段没有可用的人工神经网络,则可以借助于第二预测模块来执行可用的hd地图帮助下的预测。在这种情况下,基于运动数据、也就是说当前和先前的位置以及运动方向,确定可能的未来位置(未来轨迹),例如在车道上/人行道上,并提供概率。为此,假设道路使用者继续运动,以便获得未来位置和未来运动方向。
26、在这种情况下,在另一实施例中,高精度hd地图至少包括道路、人行道和交通引导元素(比如人行横道)。在这种情况下,高精度hd地图非常准确地(例如以厘米级准确度)对道路网络进行成像。
27、在另一设计方案中,第三预测模块被设计为基于使用道路使用者的运动数据的推断/外推来进行关于该路段的道路使用者的预测。这相应于对运动矢量/轨迹的简单推断。这尤其也可以用于例如当道路使用者不位于通常使用的路径上的情况,例如当行人在禁止位置横穿道路时。
28、进一步地,处理器可以被实施为以成对的方式比较关于每个道路使用者的预测,以便确定在对应的时间步长中潜在的危险状况。例如,如果以预测范围为5s且以相关联的概率和准确度已知道路使用者的未来位置,则可以由此计算出潜在的未来危险状况。为此,可以针对未来的每个时间步长以成对的方式比较关于道路使用者的预测。
29、在另一实施例中,处理器被设计为借助于以下因素中的至少一个来确定状况的危险性:两个道路使用者之间重叠区域的大小和/或基于道路使用者的未来加速和/或基于两个道路使用者之间的未来角度和/或两个道路使用者之间潜在碰撞之前的时间和/或基于道路使用者所使用的车道。
30、因此,两个道路使用者之间重叠区域越大则表明危险越大。道路使用者之一的未来速度增加也对应于危险更大,尤其是在加速显著的情况下。也可以考虑道路使用者之间的未来角度;因此,直接从后方接近通常意味着危险较低,这是因为可以假设从后方接近的道路使用者注意到前方的车辆。相比之下,在从侧面接近(角度不等于零)或运动方向预期改变的情况下,可以假设危险更大。同样,可以考虑预期碰撞之前的时间;因此,在相对可靠/准确的预测的情况下,碰撞之前更短的时间还意味着更短的反应时间以及因此更大的危险。
31、同样,可以考虑两个道路使用者所使用的车道;因此,当使用相同的车道时,则倾向于假设危险低,因为自己的车道通常始终在视线内,而在交叉车道的情况下、尤其是如果自行车道和道路交叉,则假设危险更大。
32、特别地,可以综合考虑这些因素,以便可靠地识别危险状况。
33、在另一设计方案中,处理器被设计为当确定状况的危险性时考虑将道路使用者的类型作为另一因素。因此,针对两个行人,即使在非常大的重叠情况下,例如在交通灯处,也几乎可以排除危险;然而,如果涉及车辆/卡车,则应假设危险高。
34、此外,在另一设计方案中,处理器被设计为借助于评估值来评估识别的危险状况。该评估值可以容易地基于识别的上述因素(比如重叠区域的大小等)来确定,即,现在从这些因素来确定关于未来状况有多么危险的评估。
35、在另一实施例中,处理器被设计为一旦超过关于评估值的给定阈值,就至少向涉及危险状况的道路使用者传输警报。如果超过了某一阈值,则应向所涉及的道路使用者传输警报。特别地,这个警报至少包括消息和评估值。因此,例如,可以在道路使用者的终端上额外地过滤掉所传输的具有低评估值的警报。这使得车辆使用者能够自行影响所显示的警报的数量。因此,愿意承担风险的车辆使用者可以阻止显示就主观而言过多的警报。