基于车联网的不良视距辅助会车系统
本发明涉及交通安全,具体涉及一种基于车联网的不良视距辅助会车系统。
背景技术:
1、目前为了防止车辆在不良视距路段会车时发生事故,常常采用车联网的方式进行车辆位置、速度等数据的双向传输,以便通过无线数据传输方式弥补视觉上的信息缺失,对传输的数据进行分析后如果发现会车会有危险会对驾驶发出预警。
2、车联网是一种特殊的移动自组织网络,其在进行数据传输的时候,需要车辆之间进行互联才能进行,但是陌生车辆进行互联时,通信安全会存在具有很大的安全性隐患,同时丁字路口的车辆数量众多,进行任意互联需要建立较多的连接关系,但是有些车辆并不需要互联传输数据,因此如果随意的建立连接关系会造成连接混乱,这样并不不能有效的辅助车辆进行会车,同时随意的建立连接关系时,其连接的安全性隐患也变的更大了。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种基于车联网的不良视距辅助会车系统,所采用的技术方案具体如下:
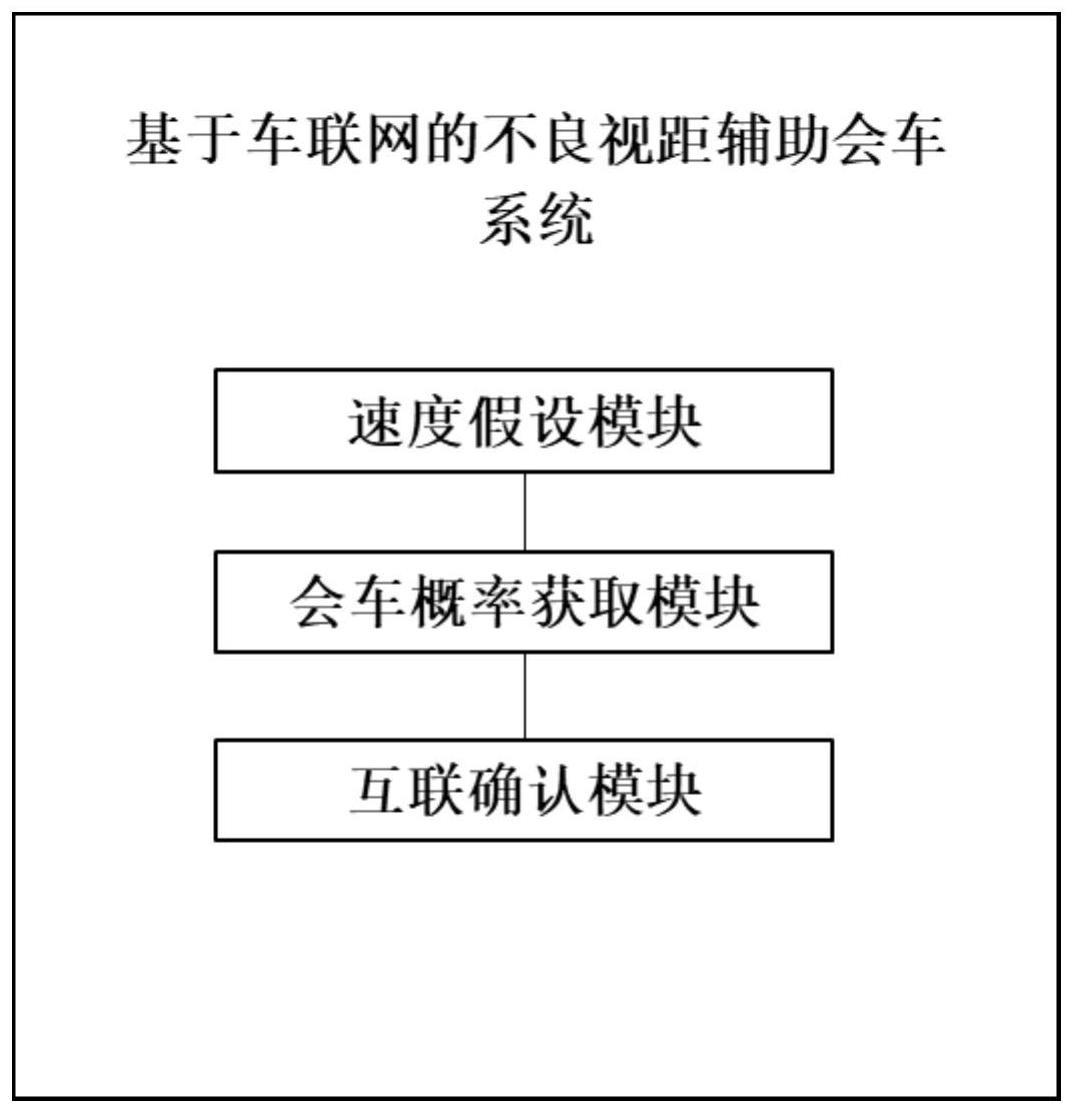
2、本发明一个实施例提供了一种基于车联网的不良视距辅助会车系统:包括速度假设模块,用于以丁字路口历史行车数据获得行车的最大速度和最小速度;以丁字路口交叉口的中心为圆心获得会车判断区域,所述会车判断区域的半径为预设半径;获得车辆将要进入会车判断区域时的速度为初始速度;将初始速度作为起始以预设速度变化步长获得车辆不同的假设速度,假设速度的上限为最大速度下限为最小速度;
3、会车概率获取模块,用于获得车辆以不同假设速度在会车判断区域行驶时每个预设时段对应的距离;基于车辆的行驶轨迹结合所述每个预设时段对应的距离获得车辆以不同假设速度行驶时各预设时段对应的位置坐标,作为预测位置坐标;基于两车辆以不同假设速度行驶时同一预设时段对应的预测位置坐标分别获得两车辆会车的假设速度;根据两车辆以各自初始速度为起始速度分别得到两车辆会车的假设速度的概率以及车辆以不同行驶轨迹行驶时的概率获得车辆的会车概率;
4、互联确认模块,用于基于两辆车会车的不同假设速度、最大速度和最小速度获得不同假设速度下两车辆会车的严重性指标;利用两车辆的会车概率和不同假设速度下两车辆会车的严重性指标获得互联必要性指标;基于所述互联必要性指标指导车辆进行互联,辅助车辆进行会车。
5、优选地,将初始速度作为起始以预设速度变化步长获得车辆不同的假设速度包括:以车辆的初始速度为起始基于预设速度变化步长将车辆的初始速度进行增大或者降低获得车辆不同的假设速度,其中车辆不同的假设速度为平均速度,表示在会车判断区域内车辆一直以假设速度行驶。
6、优选地,获得车辆以不同假设速度在会车判断区域行驶时每个预设时段对应的距离包括:对于车辆的一个假设速度,利用会车判断区域的直径、该假设速度和预设时段的时间长度获得该假设速度下预设时段的数量,进而获得该假设速度下各预设时段对应的距离。
7、优选地,行驶轨迹包括:所述行驶轨迹分为两种,一种为车辆一直直行,一种为车辆先直行再转向。
8、优选地,基于车辆的行驶轨迹结合所述每个预设时段对应的距离获得车辆以不同假设速度行驶时各预设时段对应的位置坐标,作为预测位置坐标包括:以会车判断区域的圆心为坐标原点建立直角坐标系;对于车辆以其不同的假设速度中的一个假设速度行驶时,基于在该假设速度下车辆各预设时段对应的距离和该车辆的行驶轨迹获得车辆各预设时段在直角坐标系中的位置坐标,为预测位置坐标;其中车辆基于第一行驶轨迹以各假设速度行驶时获得的各预设时段对应的预测位置坐标组成第一矩阵,车辆基于第二行驶轨迹以各假设速度行驶时获得的各预设时段对应的预测位置坐标组成第二矩阵;第一矩阵中一行元素表示车辆基于第一行驶轨迹以一个假设速度行驶时各预设时段对应的预测位置坐标;第二矩阵中一行元素表示车辆基于第二行驶轨迹以一个假设速度行驶时各预设时段对应的预测位置坐标。
9、优选地,基于两车辆以不同假设速度行驶时同一预设时段对应的预测位置坐标分别获得两车辆会车的假设速度包括:选择行驶到丁字路口的任意两辆车分别为车辆a和车辆b;选择车辆a和车辆b的不同假设速度中任意一个假设速度,分别为第一假设速度和第二假设速度;利用车辆a在第一假设速度下行驶时任意一个预设时段对应的预测位置坐标和车辆b在第二假设速度下行驶时同一预设时段对应的预测位置坐标计算获得车辆a和车辆b分别在第一假设速度和第二假设速度下行驶时车辆a和车辆b该预设时段的相对距离;设定会车阈值,若在第一假设速度和第二假设速度下行驶时车辆a和车辆b该预设时段的相对距离小于会车阈值,则车辆a以第一假设速度行驶时会与以第二假设速度行驶时的车辆b会车;第一假设速度和第二假设速度分别为车辆a和车辆b会车的假设速度。
10、优选地,车辆的会车概率为:
11、hc(sva,j,svb,i)=[p(sva,j|va,0)*p(svb,i|vb,0)]*[p(a)*p(b)]
12、其中,hc(sva,j,svb,i)表示车辆a以第j个假设速度sva,j与车辆b以第i个假设速度会车时的会车概率;p(sva,j|va,0)表示车辆a初始速度为va,0的基础上假设速度为sva,j的概率,p(svb,i|vb,0)表示车辆b初始速度为vb,0的基础上假设速度为svb,i的概率;p(a)表示车辆a在会车时选择对应行驶轨迹的概率为p(a);p(b)表示车辆b在会车时选择对应行驶轨迹的概率为p(b)。
13、优选地,不同假设速度下两车辆会车的严重性指标为:
14、
15、其中,yx(sva,j,svb,i)表示车辆a以第j个假设速度sva,j与车辆b以第i个假设速度会车时的两车辆会车的严重性指标;vmax表示最大速度,vmin表示最小速度。
16、优选地,互联必要性指标为:
17、
18、其中,yc(a,b)表示车辆a与车辆b的互联必要性指标;yx(sva,j,svb,i)表示车辆a以第j个假设速度sva,j与车辆b以第i个假设速度会车时的两车辆会车的严重性指标;hc(sva,j,svb,i)表示车辆a以第j个假设速度sva,j与车辆b以第i个假设速度会车时的会车概率,i和j分别表示车辆a和车辆b会车时车辆a的假设速度的数量和车辆b假设速度的数量。
19、优选地,基于所述互联必要性指标指导车辆进行互联,辅助车辆进行会车包括:将车辆之间的互联必要性指标进行归一化;根据归一化后的车辆之间的互联必要性指标对车联划分等级分别为第一等级、第二等级和第三等级;按照顺序依次对第一等级、第二等级和第三等级的车辆进行互联,辅助车辆进行会车。
20、本发明实施例至少具有如下有益效果:本发明通过在丁字路口获得会车判断区域,获得将要进入丁字路口会车判断区域的车辆的初始速度,在车辆初始速度的基础上获得车辆的假设速度,根据两车辆以假设速度行驶时同一预设时段的相对距离判断两辆车是否会车,对会车的车辆根据其在初始速度的基础上得到假设速度的概率以及所选择的行驶轨迹概率获得两辆车的会车概率;然后基于会车时车辆的假设速度获得会车的严重性指标,基于两车辆的多个假设速度下会车概率和会车的严重性指标得到两车辆之间的互联必要性指标,基于互联必要性指标分等级的指导车辆进行互联辅助车辆会车,能够避免车辆在经过丁字路口通过车联网进行互联辅助会车的混乱状况,能够优先的指导互联必要性指标高的车辆进行互联,然后共享行车数据从而辅助会车,可以有效的防止车辆之间不必要的互联,防止事故的发生,同时基于互联必要性指标分等级的指导车辆进行互联时不同的等级有不同的验证信息,可以保证互联的通信安全。
- 还没有人留言评论。精彩留言会获得点赞!