一种基于车联网的高速公路瓶颈点疏散加速方法
本发明属于高速公路瓶颈点管理、智能交通技术和自动驾驶等,具体涉及一种基于车联网的高速公路瓶颈点疏散加速方法。
背景技术:
1、近年来,随着高速公路里程不断增长,高速公路交通量持续增加,路况复杂度、拥挤程度也随之加大。在此背景下,一旦发生交通事故或突发事件,或是出现车道减少、进入隧道、收费站等情况,就极易形成瓶颈,造成交通堵塞。堵塞事件解决后,瓶颈开始疏散,而后车驾驶员视线往往会受到前车阻挡,存在较高的启动延迟,因此,如何解除驾驶员受阻视线、减少启动延迟、加速高速公路瓶颈点疏散是高速公路运营管理领域目前亟待解决的问题之一。
2、随着智能交通与自动驾驶领域的深入研究,车联网技术实现持续进步与成熟发展,它以行驶中的车辆为信息感知对象,借助相关信息通信技术,实现车辆与车辆、行人、道路、网络、系统平台等多终端之间的连接与沟通。目前,车联网技术在碰撞风险报警、绿波速度建议、道路限速提醒等多方面得到了广泛应用,但其在实时道路交通引导、瓶颈点车队管理等方面应用较少,亟需发挥其互联互通的优势,通过车辆与车辆之间的通讯网络共享视角,聚焦微观层面,解除后车驾驶员的视线受阻问题,减少启动延迟,加速瓶颈点疏散、创造更高效、可持续的智能高速公路网络。
3、专利号为cn106408956b的发明中公开了一种隧道交通拥堵快速疏散方法及控制系统,当隧道内道路突发交通事故导致车辆无法正常通行时,所有到达事故点上游的车辆开始排队,开通其中被事故影响较小的几条道路作为紧急行车道,在排队车辆的排队长度中设置n个控制点处,将整条道路上的车辆分隔为n个部分,排队车辆根据控制点标志间断的通过事故点。该发明能解决隧道交通的拥堵情况,为车辆的通行节约了大量时间;但是仍然需要借助外部控制进行疏散,无法通过对车辆自身的行驶状态进行优化实现瓶颈点的疏散。
技术实现思路
1、解决的技术问题:本发明提出了一种基于车联网的高速公路瓶颈点疏散加速方法,聚焦微观层面及精细化问题,从方法论的角度,通过车际通讯、车联网等智能交通与自动驾驶领域相关技术,为高速公路瓶颈点疏散提供有效、可行的解决方案。
2、技术方案:
3、本发明公开了一种基于车联网的高速公路瓶颈点疏散加速方法,所述高速公路瓶颈点疏散加速方法包括以下步骤:
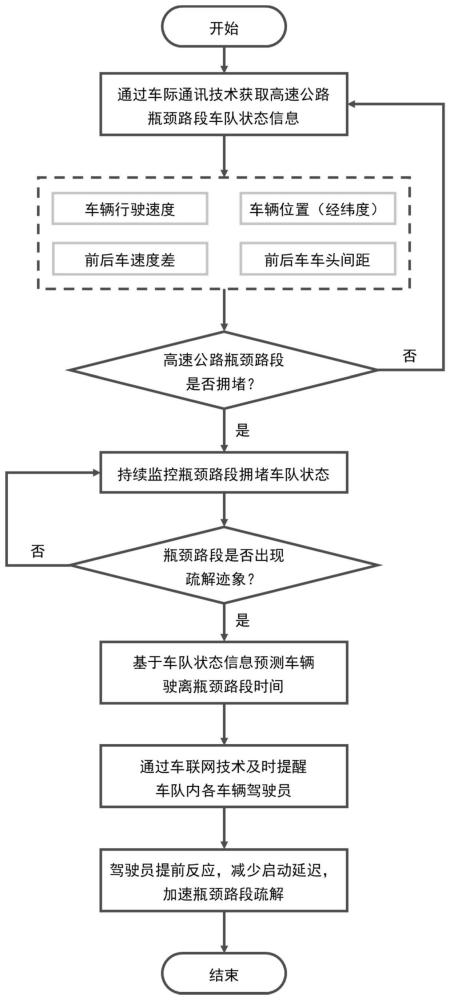
4、步骤a,以高速公路上的车辆j为中心,将其区间覆盖范围内所有车辆组成车队z,通过车联网持续获取车队z的状态信息;
5、步骤b,根据车队z的状态信息判断车队z对应的堵塞状态,将堵塞状态反馈至车队z内的各车辆;
6、步骤c,将堵塞车队头部作为车队的瓶颈点,基于车队z的的前部车辆的状态信息,监测瓶颈点是否出现疏散迹象,基于车队z的状态信息预测车队z内的各车辆驶离瓶颈点的时间,并通过车联网提醒车队z内各车辆驾驶员,令高速公路瓶颈点上游车队内各车辆驾驶员在各自的驶离瓶颈点的时间之前启动车辆。
7、进一步地,步骤a中,车辆j的区间覆盖范围为:以车道宽度a为宽,以车辆j前、后各距离b为长的矩形,a和b均为正数。
8、进一步地,步骤a中,车队z的状态信息包括:车队内的总车辆数n,车辆j在t时刻的行驶速度sj(t),车辆j在t时刻的位置pj(t);车辆j+1与前车j的速度差δsj+1(t),车辆j+1与车辆j的车头间距以及车头时距车辆j为车辆j+1的前车,其中:
9、δsj+1(t)=sj+1(t)-sj(t);
10、
11、
12、式中,sj+1(t)是车辆j+1在t时刻的行驶速度;pj+1(t)为车辆j+1在t时刻的位置。
13、进一步地,步骤a中,采用欧式距离,车辆j+1与车辆j的车头间距以及车头时距分别表示为:
14、
15、
16、式中,是车辆j在t时刻的经纬度坐标,是车辆j+1在t时刻的经纬度坐标。
17、进一步地,步骤b中,根据车队z的状态信息判断车队z对应的堵塞状态的过程包括以下步骤:
18、步骤b1,基于车队z的状态信息计算得到t时刻车队z的平均行驶速度和平均车头间距
19、
20、
21、式中,n为车队z内的车辆总数,sj(t)为t时刻车辆j的行驶速度;为t时刻车辆j与车辆j-1的车头间距,车辆j-1为车辆j的前车;
22、步骤b2,设车队的平均行驶速度堵塞阈值为smin,平均车头间距堵塞阈值为瓶颈点堵塞状态的判断条件γcongestion为:
23、
24、其中,事件c表示事件d表示当γcongestion=0时,车队z畅通行驶,处于非堵塞状态,当γcongestion=1时,车队z行驶缓慢或阻塞,处于堵塞状态。
25、进一步地,步骤c中,基于车队z的的前部车辆的状态信息,基于车队z的的前部车辆的状态信息,计算疏散迹象的判断标准γmitigation:
26、
27、其中,事件e表示事件f表示为车队前部车辆j1在t时刻的行驶速度,为车队前部车辆j2在t时刻与前车j1的车头间距;smitigation为车辆行驶速度疏散阈值,hgmitigation为车头间距疏散阈值;当γmitigation=0时,瓶颈点内车队z未出现疏散迹象,仍处于堵塞状态,当γmitigation=1时,瓶颈点内车队z头部出现疏散迹象,堵塞状态开始疏散。
28、进一步地,步骤c中,采用下述公式预测车队z内的各车辆驶离瓶颈点的时间:
29、
30、其中,tj(t)为t时刻高速公路瓶颈点车队z内的车辆j在前方出现疏散迹象后驶离瓶颈点的总时间;为t时刻车队z的头部首辆车到车辆j各车驾驶员因反应、启动车辆造成的时间延迟;为车辆j自t时刻起行驶至离开瓶颈点所花费的行驶时间。
31、进一步地,步骤c中,采用下述公式计算得到知
32、
33、
34、其中,τi(t)为t时刻高速公路瓶颈点车队z内第i辆车的启动延迟时间;为车辆i在t时刻与前车的车头间距;|ω|为瓶颈点堵塞消散速度,单位为km/h,根据交通流与车流波理论,其计算公式为:
35、
36、其中,ω为瓶颈点堵塞消散波波速,单位为km/h;qupstream和kupstream分别为瓶颈点上游车流量及密度,单位分别为veh/h和veh/km;qdownstream和kdownstream分别为瓶颈点下游车流量及密度。
37、有益效果:
38、本发明的基于车联网的高速公路瓶颈点疏散加速方法,聚焦微观层面及精细化问题,从方法论的角度,利用车联网技术,持续获取车队状态信息,监控高速公路瓶颈点堵塞状态,并监测瓶颈点疏散迹象,及时告知疏散状况、预测提醒驶离瓶颈点时间,解决堵塞排队时的驾驶员视线受阻问题,使车队内各车辆驾驶员收到疏散提示信息后把握更准确的启动时机,减少车辆起步延迟,加速瓶颈点疏散,为疏散高速公路交通堵塞、增强车辆驾驶安全性、提高系统应对突发事件的弹性、创造更高效的高速公路网络提供有效助力。
- 还没有人留言评论。精彩留言会获得点赞!