一种碰撞预警方法、系统及存储介质与流程
本发明涉及智能交通,特别是涉及一种碰撞预警方法、系统及存储介质。
背景技术:
1、在车辆行驶过程中,由于车辆的自身结构的影响,车辆不可避免地存在视野盲区。同时,受到地形、建筑物、以及其他交通工具的遮挡,车辆也容易形成视野盲区。
2、行人、非机动车等弱势交通参与者在交通出行过程中存在较大的安全隐患,特别是俗称的“鬼探头”事件,即在前方有车辆或其他障碍物阻挡视线的前提下,从视野盲区中突然蹿出一辆非机动车或行人。
3、为避免由于“鬼探头”事件引发的交通安全问题,相关技术中采用如下方案:实时检测前方是否存在有“鬼探头”类风险的障碍物,并识别判断为车辆类或非车辆障碍物,分别以直接和间接的方式获取视觉盲区图像,后根据视觉盲区图像判断出盲区是否存在行人,当存在行人时,结合本车当前位置、本车当前运动速度、盲区中的行人位置以及行人运动速度,划分出假设碰撞区域,最后基于假设碰撞区域作出限制车速的决策。
4、在上述方案中,由于市面上大部分车辆不具备完整的感知能力,且即便是高等级智能车辆,也因数据隐私安全、技术壁垒等原因无法打通企业与企业、车与车之间的数据链路;其次,周边环境不一定会有车辆或具有采集图像能力的车辆,或采集到的图像不一定能覆盖到盲区的所有范围。对上述方案来说,如何获取准确且有效的盲区数据对解决“鬼探头”事件存在较大难度。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种碰撞预警方法、系统及存储介质,通过道路两侧的路侧感知设备可实时获取辅助车辆盲区的路侧感知数据,目标车辆可获取辅助车辆盲区的全局视野信息,解决了盲区数据获取困难的问题。
2、第一方面,本技术提供了一种碰撞预警方法,包括以下步骤:
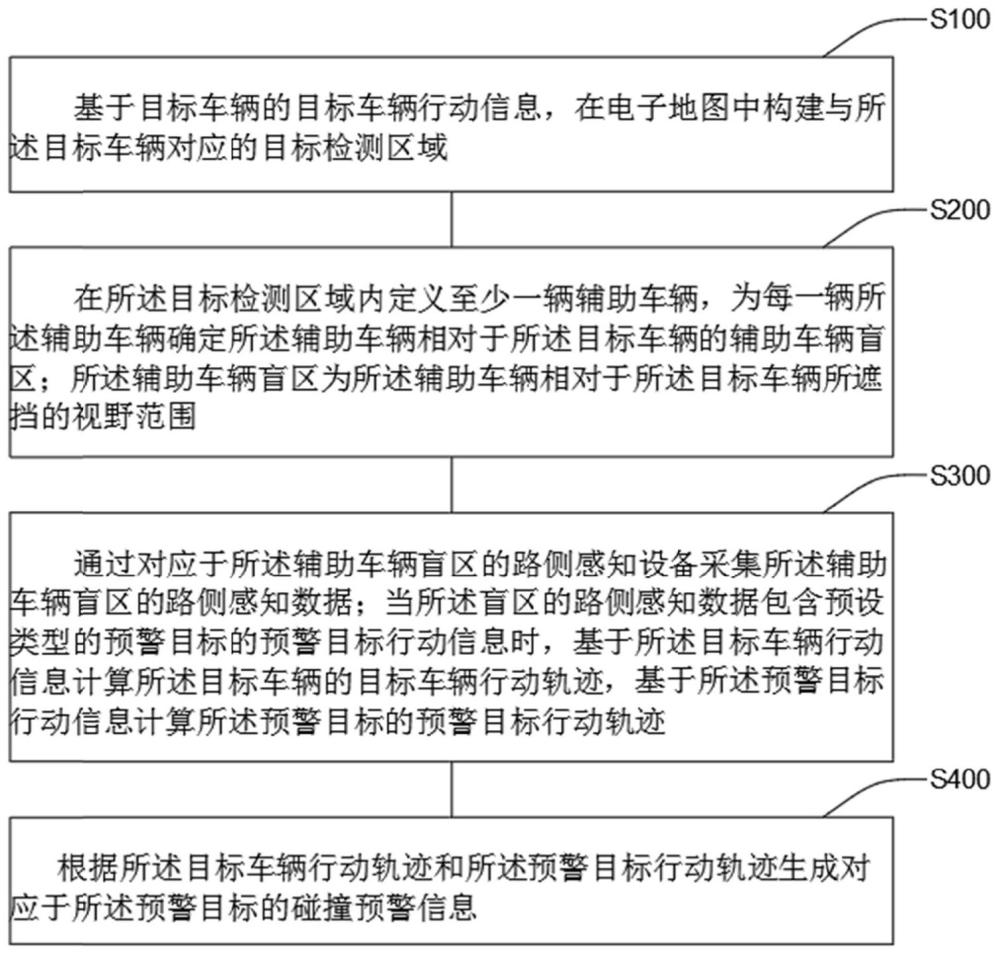
3、基于目标车辆的目标车辆行动信息,在电子地图中构建与所述目标车辆对应的目标检测区域;
4、在所述目标检测区域内定义至少一辆辅助车辆,为每一辆所述辅助车辆确定所述辅助车辆相对于所述目标车辆的辅助车辆盲区;所述辅助车辆盲区为所述辅助车辆相对于所述目标车辆所遮挡的视野范围;
5、通过对应于所述辅助车辆盲区的路侧感知设备采集所述辅助车辆盲区的路侧感知数据;当所述盲区的路侧感知数据包含预设类型的预警目标的预警目标行动信息时,基于所述目标车辆行动信息计算所述目标车辆的目标车辆行动轨迹,基于所述预警目标行动信息计算所述预警目标的预警目标行动轨迹;
6、根据所述目标车辆行动轨迹和所述预警目标行动轨迹生成对应于所述预警目标的碰撞预警信息。
7、在一实施例中,所述基于目标车辆的目标车辆行动信息,在电子地图中构建与所述目标车辆对应的的目标检测区域,具体包括:
8、基于所述目标车辆行动信息确定所述目标车辆的当前位置坐标,并将所述目标车辆的当前位置坐标定义为第一位置坐标,根据所述第一位置坐标确定所述目标车辆在所述电子地图中对应的当前车道;
9、确定位于所述当前车道且与所述第一位置坐标的距离为预设的第一长度的第二位置坐标,将位于所述第一位置坐标和所述第二位置坐标之间的所述当前车道所覆盖的区域确定为基准检测区域;
10、在所述电子地图中,将所述基准检测区域的相对两侧且与所述基准检测区域的边缘相距不超过预设的第一宽度的区域确定为辅助检测区域;
11、基于所述基准检测区域和所述辅助检测区域,生成所述目标车辆检测区域。
12、在一实施例中,所述为每一辆所述辅助车辆确定所述辅助车辆相对于所述目标车辆的辅助车辆盲区,具体包括:
13、根据所述目标车辆的目标车辆行动信息和所述辅助车辆的辅助车辆行动信息确定所述辅助车辆盲区的盲区方向;
14、基于所述辅助车辆行动信息确定所述辅助车辆的当前位置坐标,并将所述辅助车辆的当前位置坐标定义为第三位置坐标,确定在所述盲区方向上且与所述第三位置坐标的距离为预设的第二长度的第四位置坐标;
15、沿所述盲区方向,在所述第三位置坐标和所述第四位置坐标之间建立分别以所述第二长度和预设的第二宽度为边长的矩形区域,并将所述矩形区域定义为所述辅助车辆盲区。
16、在一实施例中,在当所述盲区的路侧感知数据包含预设类型的预警目标的预警目标行动信息时,基于所述目标车辆行动信息计算所述目标车辆的目标车辆行动轨迹,基于所述预警目标行动信息计算所述预警目标的预警目标行动轨迹之前,还包括:
17、根据所述预警目标行动信息确定所述预警目标的当前位置坐标,并将所述预警目标的当前位置坐标定义为第五位置坐标;
18、基于所述第五位置坐标判断所述预警目标是否位于所述目标检测区域;若是,则根据所述第五位置坐标确定所述预警目标当前位于的辅助车辆盲区,并将所述预警目标当前位于的辅助车辆盲区定义为目标盲区;
19、根据所述目标盲区的路侧感知数据获取所述目标盲区的几何范围;
20、将所述目标盲区的几何范围写入碰撞预警信息。
21、在一实施例中,在将所述目标盲区的几何范围写入碰撞预警信息之后,还包括:
22、基于所述目标车辆行动信息判断所述目标车辆是否静止;若是,则向所述目标车辆发送所述碰撞预警信息;若否,则基于所述预警目标行动信息判断所述预警目标是否静止;当所述预警目标静止时,向所述目标车辆发送所述碰撞预警信息;当所述预警目标不静止时,则计算所述目标车辆行动轨迹和所述预警目标行动轨迹。
23、在一实施例中,在根据所述目标车辆行动轨迹和所述预警目标行动轨迹生成对应于所述预警目标的碰撞预警信息之前,还包括:
24、判断所述目标车辆行动轨迹和所述预警目标行动轨迹之间是否存在交点;若是,则将所述交点定义为碰撞点,并计算所述碰撞点与所述目标车辆之间的碰撞距离以及所述目标车辆与所述预警目标的最小安全距离,并将所述碰撞距离和所述最小安全距离写入目标车辆控制信息;若否,则向所述目标车辆发送碰撞预警信息。
25、在一实施例中,在计算所述碰撞点与所述目标车辆之间的碰撞距离以及所述目标车辆与所述预警目标的最小安全距离,并根据所述碰撞距离和所述最小安全距离生成目标车辆控制信息之后,还包括:
26、基于所述最小安全距离生成安全距离坐标;
27、计算所述目标车辆达到安全距离坐标的预期减速速度和预期减速距离,将所述预期减速速度和所述预期减速距离写入所述目标车辆控制信息;
28、判断所述碰撞距离是否大于所述最小安全距离;若是,则计算所述预警目标达到碰撞点的行动时间,并将所述行动时间写入所述碰撞预警信息;若否,则向所述目标车辆发送所述目标车辆控制信息,并根据所述目标车辆控制信息生成目标车辆控制指令,并驱动所述目标车辆执行所述目标车辆控制指令。
29、在一实施例中,在向所述目标车辆发送所述目标车辆控制信息,并根据所述目标车辆控制信息生成目标车辆控制指令,并驱动所述目标车辆执行所述目标车辆控制指令之后,还包括:
30、确定位于所述目标车辆的预设的距离范围内的至少一辆周边车辆,并计算所述周边车辆与所述目标车辆的位置关系数据;
31、根据所述位置关系数据和所述目标车辆控制信息生成周边车辆控制信息,向所述周边车辆发送所述周边车辆控制信息,并根据所述周边车辆控制信息生成周边车辆控制指令,并驱动所述周边车辆执行所述周边车辆控制指令。
32、第二方面,本技术提供了一种碰撞预警系统,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序用于由所述处理器加载并执行如第一方面中任意一项所述的碰撞预警方法。
33、第三方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质存储有指令,所述指令用于由处理器加载并执行如第一方面中任意一项所述的碰撞预警方法。
34、在本实施例的碰撞预警方法中,通过道路两侧的路侧感知设备可实时获取辅助车辆盲区的路侧感知数据,目标车辆可获取目标检测区域内辅助车辆盲区的全局视野信息,解决了盲区数据获取困难的问题,并基于目标车辆与预警目标的行动信息,有效预测目标车辆与预警目标是否发生碰撞,并在预测发生碰撞之前发送碰撞预警信息提醒目标车辆,便于目标车辆的驾驶员及时做出停车或减速等操作,帮助目标车辆提前规避碰撞事件的发生。
- 还没有人留言评论。精彩留言会获得点赞!