一种复杂地下空间智能寻车系统及方法
本发明涉及地下空间智能寻车,尤其涉及一种复杂地下空间智能寻车系统及方法。
背景技术:
1、随着中国经济的快速发展,全国机动车保有量不断增长,停车难问题日益凸显,随之产生了许多大型停车场和立体停车场。这些大容量停车场有效地缓解了停车难问题,但是又引发了找车位和反向寻车的困难,不仅影响车主的时间和精力,带来不好的体验,而且也增加了车位管理的困难。
技术实现思路
1、针对上述缺陷,本发明提供一种复杂地下空间智能寻车系统及方法,具有较强的通用性,可以使车主方便地在各种不同的大型停车场或立体停车场中寻车,且能减少系统中需要使用的一体化车位识别模块数量。
2、为了实现本发明的目的,拟采用以下技术:
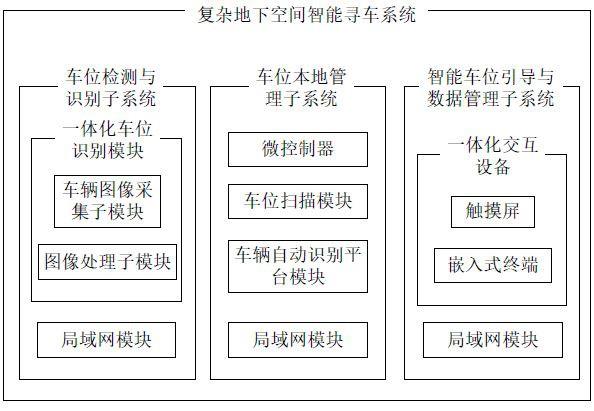
3、一种复杂地下空间智能寻车系统,包括:
4、车位检测与识别子系统,用于车辆目标检测和车辆字符识别,包括一体化车位识别模块以及设于其上的局域网模块,一体化车位识别模块包括用于拍摄车辆图像的车辆图像采集子模块、用于处理车辆图像的图像处理子模块;
5、车位本地管理子系统,用于车位扫描和车位内车辆检测,包括微控制器、车位扫描模块、车辆自动识别平台模块、局域网模块,一体化车位识别模块设于车辆自动识别平台模块上,且可沿并排设置的多个车位一端直线移动,车位扫描模块的数量与停车场的车位数相同,分别设于各车位地面或天花板,车位扫描模块采用测距传感器;
6、智能车位引导与数据管理子系统,用于寻车路径规划和停车数据管理,包括一体化交互设备、局域网模块,一体化交互设备包括触摸屏、嵌入式终端,嵌入式终端安装有寻车路径规划软件,一体化交互设备数量为多个,分别设于停车场及停车场服务区域的各个人员出入口。
7、进一步,一体化车位识别模块的数量与停车场的车位组数相同,车辆自动识别平台模块的数量与一体化车位识别模块的数量相同,车位检测与识别子系统的局域网模块数量与一体化车位识别模块数量相同,车位本地管理子系统的局域网模块数量与微控制器数量相同,智能车位引导与数据管理子系统的局域网模块数量与一体化交互设备数量相同。
8、进一步,车辆图像采集子模块采用红外夜视摄像头,图像处理子模块采用微处理器;
9、一体化车位识别模块还包括盒体、电池盒;
10、盒体包括底盒,底盒外侧面开设有多个通口,分别与微处理器的各接口匹配,底盒上装配有盖板,盖板上设有竖板,底盒内底面固定有四个第一螺柱;
11、电池盒装配于盒体内,电池盒内装配有若干电池,电池盒上装配有四个与各第一螺柱分别同轴的第二螺柱;
12、微处理器和电池盒上分别设有四个第一安装孔和四个第二安装孔,通过螺杆依次穿入第一安装孔、第二螺柱、第二安装孔、第一螺柱之间,固定微处理器和电池盒;
13、红外夜视摄像头固定装配于竖板。
14、进一步,车辆自动识别平台模块包括与微控制器电连接的驱动器和由驱动器驱动的直线模组,一体化车位识别模块通过螺栓装配于直线模组的滑块上。
15、进一步,寻车路径规划软件包括网络应用程序和数据库。
16、采用复杂地下空间智能寻车系统的一种复杂地下空间智能寻车方法,包括步骤:
17、s100:车位扫描模块检测到车辆进入车位的信号后,将信号上传到微控制器,微控制器将占用车位信息发送到各嵌入式终端;
18、s200:微控制器控制车辆自动识别平台模块,通过车辆自动识别平台模块将一体化车位识别模块移动到被检测到的车辆所在车位一端;
19、s300:通过车辆图像采集子模块采集车辆图像;
20、s400:通过图像处理子模块将车辆图像进行处理,获得车牌信息、车辆颜色信息、车辆品牌信息,其中获得车牌信息的步骤包括:
21、s410:图像灰度化;
22、s420:图像灰度修正;
23、s430:图像去噪;
24、s440:目标检测;
25、s450:采用通过crnn+ctc方法训练的字符识别模型进行车牌文字识别,获得车牌信息;
26、s500:图像处理子模块将车牌信息上传到微控制器,微控制器将车牌信息发送到各嵌入式终端,寻车路径规划软件将车牌信息与占用车位信息进行关联并储存;
27、s600:在收到车主通过触摸屏发出的寻车请求后,寻车路径规划软件获取指定的占用车位信息,计算寻车路线,发送到触摸屏进行显示;
28、s700:车位扫描模块检测到车辆离开车位的信号后,将信号上传到微控制器;
29、s800:寻车路径规划软件将s600所述占用车位信息和与其关联的车牌信息删除。
30、进一步,预先设置轮询时间t和距离阈值s;
31、s100中,车位扫描模块检测车辆进入车位包括以下步骤:
32、测距传感器测得距离a,判断是否a<s,若是,则车辆扫描模块判定车辆进入车位并结束循环,若否,则等待轮询时间t,再次通过测距传感器测得距离a;
33、s700中,车位扫描模块检测车辆离开车位包括以下步骤:
34、测距传感器测得距离a,判断是否a≥s,若是,则车辆扫描模块判定车辆离开车位并结束循环,若否,则等待轮询时间t,再次通过测距传感器测得距离a。
35、进一步,s450所述字符识别模型的训练步骤包括:
36、创建车牌生成器,随机生成多个不同的车牌号码并分别保存为图片,将图片输出到训练数据集;
37、读取训练数据集,并使用dataloader类创建一个数据加载器对象;
38、定义模型对象,并将其移动到运算设备上;
39、定义损失函数和优化器,并设置学习率衰减策略;
40、循环迭代训练,每轮迭代遍历数据加载器中的所有数据,将车牌图片作为输入,标签作为输出,计算模型输出和标签之间的损失,并根据损失进行反向传播和梯度更新;
41、在每个epoch结束时,记录当前模型在验证集上的准确率,并保存当前模型的参数,如果当前模型的验证准确率比之前的最佳准确率要高,则将该模型保存为当前最佳模型;
42、训练结束后,打印最佳模型在测试集上的准确率,并将最佳模型的参数保存到本地文件中;
43、测试模型。
44、进一步,s600包括以下步骤:
45、s601:车主在触摸屏上输入车牌进行查询后,嵌入式终端启动寻车路径规划软件;
46、s602:寻车路径规划软件查询该车牌信息是否有匹配的车位信息,若是,则执行s603,若否,则嵌入式终端发送查询失败信息到触摸屏,触摸屏显示查询失败并返回s601;
47、s603:嵌入式终端通过寻车路径规划软件计算从车主所操作的触摸屏到车位之间的最短路径;
48、s604:触摸屏显示s603所述最短路径。
49、本技术方案的有益效果在于:
50、1、一体化车位识别模块将车辆图像采集子模块和图像处理子模块整合,可快速地在采集图像后进行图像处理,图像处理子模块通过图像灰度化、图像灰度修正、图像去噪、目标检测、文字识别快速地进行图像处理,获得车牌信息,尤其是采用通过crnn+ctc方法训练字符识别模型进行车牌文字识别,ctc 可以将 crnn 模型的输出序列映射到正确的文本序列上,从而实现文字识别任务,模型的识别精度和效率较高。
51、2、由于常见的停车位大部分均呈直线排列,大型停车场通常由很多组车位组成,通过将一体化车位识别模块设于车辆自动识别平台模块上,可以减少使用的一体化车位识别模块的数量,降低现场搭建的复杂度,降低搭建成本,微控制器可以方便地控制车位本地管理子系统中其他各部件。
52、3、各嵌入式终端均会收到占用车位信息和车牌信息并进行关联,车主在任意一体化交互设备均可查找车辆位置,车主获取寻车路线时可通过触摸屏所连接的嵌入式终端计算寻车路线并查看,解决了大型停车场反向寻车困难的问题。
53、4、各子系统均配有局域网模块,便于互相之间的通信。
- 还没有人留言评论。精彩留言会获得点赞!