一种网联混行环境下隧道事故路段的协同换道方法及系统
本发明属于网联混行环境下的交通安全领域,具体涉及一种网联混行环境下隧道事故路段的协同换道方法及系统。
背景技术:
1、公路隧道具有封闭、视线受限、空间狭小、救援困难等特性,一旦发生交通事故,整条隧道的通行能力和安全性将受到严重影响,对生命和财产安全的威胁程度远高于开放路段。因此,当隧道内发生事故后,及时进行换道以消解交通冲突至关重要。
2、隧道内发生事故时,上游车辆需要在故障车上游一定距离内完成换道,以确保顺利驶离隧道。否则,将加剧交通拥堵情况,并增加事故风险,这种有明确目标的换道行为被称为强制性换道。与自由换道相比,强制性换道存在一个最迟换道点,因此更具侵略性和危险性。网联通信技术赋予了网联汽车高精度感知、高速通信和超快速反应的能力,可以为驾驶员提供即时准确的交通环境信息,从而支持其换道决策。
3、随着自动控制技术的不断发展,未来网联人工驾驶车辆和网联自动驾驶车辆将会长期并存,在这种网联人工驾驶车辆和网联自动驾驶车辆混行的环境下,车辆之间的交互行为在换道过程中变得尤为重要,但是现有方法是单车换道,因此,现有方法的换道效率较低,那么,提出一种新的换道方法来提高交通通行效率和安全性是十分必要的。
技术实现思路
1、本发明的目的是为解决现有方法换道效率低的问题,而提出的一种网联混行环境下隧道事故路段的协同换道方法及系统。
2、本发明为解决上述技术问题所采取的技术方案是:
3、基于本发明的一个方面,一种网联混行环境下隧道事故路段的协同换道方法,所述方法具体包括以下步骤:
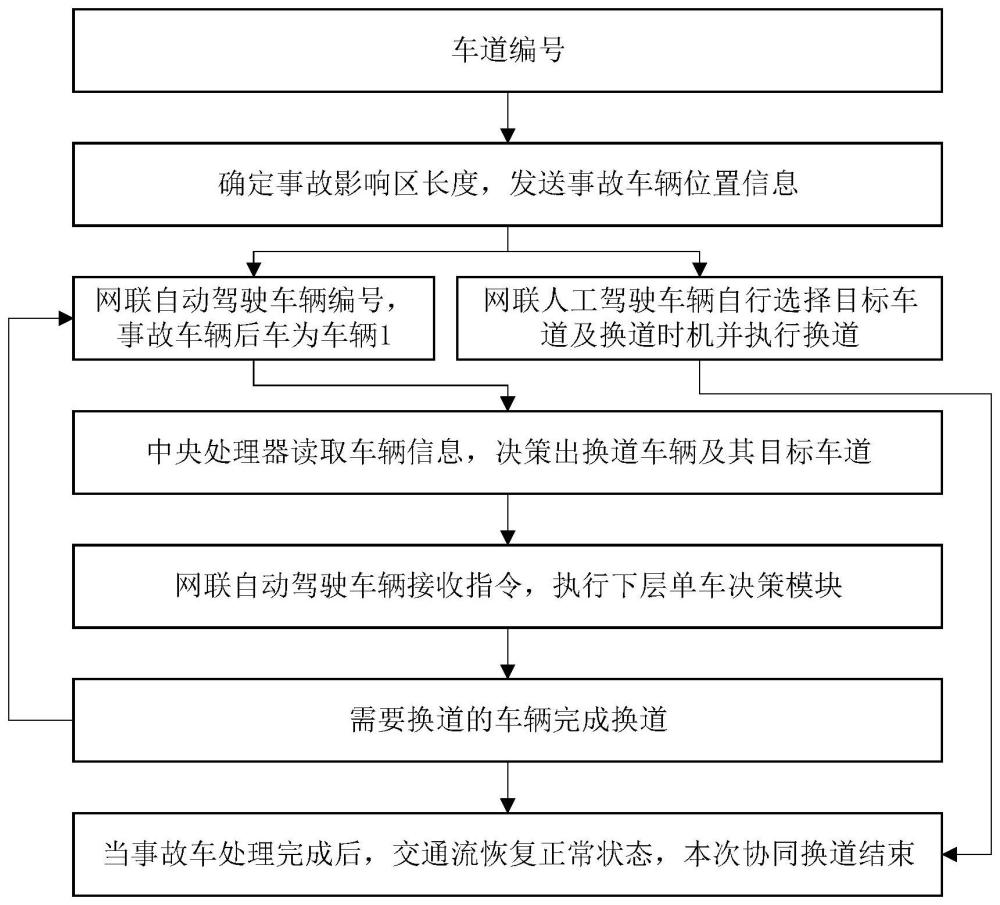
4、步骤一、沿车辆行驶方向,由右向左对单向通行隧道的各条车道依次进行编号,将各条车道分别编号为第1车道、第2车道、…、第n车道;
5、步骤二、当第i车道上发生交通事故时,其中i≠1且i≠n,将发生交通事故的车辆的位置作为起点位置,将交通事故所能影响的极限位置作为终点位置,起点位置与终点位置之间的区域即为在第i车道上的交通事故影响区,将交通事故影响区的长度表示为s;
6、对第i车道上的位于交通事故影响区内的网联自动驾驶车辆执行步骤三,第i车道上的位于交通事故影响区内的网联人工驾驶车辆则自行选择目标车道及换道时机;
7、步骤三、对位于发生交通事故的车辆后面的网联自动驾驶车辆进行编号,即根据网联自动驾驶车辆与发生交通事故车辆的距离,按照距离由近及远的顺序对各网联自动驾驶车辆进行由小到大的编号;
8、初始化车辆编号n=1,对车辆n和车辆n+1执行步骤四;
9、步骤四、计算出第i-1车道的当前车流速度以及第i+1车道的当前车流速度;
10、若第i-1车道的当前车流速度大于等于第i+1车道的当前车流速度,则将第i-1车道作为车辆n的目标车道,将第i+1车道作为车辆n+1的目标车道;
11、否则,若第i-1车道的当前车流速度小于第i+1车道的当前车流速度,将第i-1车道作为车辆n+1的目标车道,将第i+1车道作为车辆n的目标车道;
12、步骤五、车辆n和车辆n+1均被称为换道车辆,对车辆n和车辆n+1同时执行步骤五一至步骤五五的过程,直至车辆n或车辆n+1换道完成时,执行步骤六;
13、步骤五一、记换道车辆与目标车道前车k的距离为l1,判断距离l1是否满足式(1)的条件:
14、l1≥si-sk+w sinθ (1)
15、式中:si为换道车辆在时间t内行驶的水平距离,sk为目标车道前车k在时间t内行驶的水平距离,w为车辆宽度,θ为换道车辆在换道过程中与水平线之间的夹角;
16、步骤五二、若换道车辆满足式(1)的条件,则执行步骤五三;若换道车辆不满足式(1)的条件,则换道车辆先减速等待目标车道的下一换道间隙,在下一换道间隙返回执行步骤五一;
17、步骤五三、记换道车辆与目标车道后车j的距离为l2,判断距离l2是否满足式(3)的条件:
18、l2≥sj-si+w sinθ (3)
19、式中:sj为目标车道后车j在时间t内行驶的水平距离;
20、步骤五四、若换道车辆满足式(3)的条件,则换道车辆执行换道;
21、若换道车辆不满足式(3)的条件,则执行步骤五五;
22、步骤五五、若目标车道后车j为自动驾驶车辆,则目标车道后车j减速让行且换道车辆加速换道;
23、若目标车道后车j为人工驾驶车辆,则进行换道博弈;
24、换道博弈的具体过程为:
25、构建换道车辆的收益函数p及目标车道后车的收益函数q,并根据换道车辆和目标车道后车的收益函数进行决策:
26、
27、
28、subject to
29、r∈{0,1},r(r-1)=0
30、ai∈[amin,amax]
31、vi∈[vmin,vmax]
32、aj∈[amin,amax]
33、vj∈[vmin,vmax]
34、其中,r={0,1},r=0表示保持当前车道,r=1表示向目标车道换道;(ai*,r*)表示目标车辆与目标车道后车博弈时的博弈解,γ2表示目标车道后车的候选策略集,γ2(ai,r)表示在给定换道车辆的策略时目标车道后车的最优策略集,表示将公式左端的计算方法定义为公式右端,amin是换道车辆允许的最小加速度,amax是换道车辆允许的最大加速度,ai是换道车辆的加速度,vmin是换道车辆允许的最小速度,vmax是换道车辆允许的最大速度,vi是换道车辆的速度,vj为目标车道后车的速度,aj是目标车道后车的加速度,αi和αj是权重系数;
35、当博弈解(ai*,r*)中的r*等于1时,则代表换道车辆博弈成功,换道车辆向目标车道换道,当博弈解(ai*,r*)中的r*等于0时,则代表换道车辆博弈失败,换道车辆先减速等待目标车道的下一换道间隙,在下一换道间隙返回执行步骤五一;
36、步骤六、若换道完成的车辆以第i-1车道为目标车道,则车辆n+2以第i-1车道为目标车道并开始执行步骤五一至步骤五五的换道过程,未换道完成的车辆则继续进行换道;
37、若换道完成的车辆以第i+1车道为目标车道,则车辆n+2以第i+1车道为目标车道并开始执行步骤五一至步骤五五的换道过程,未换道完成的车辆则继续进行换道;
38、步骤七、直至步骤六中同时换道的两个车辆中的任一车辆换道完成时,判断除了步骤六中正在换道的车辆之外,在第i车道且在发生交通事故车辆的后面是否还有网联自动驾驶车辆;
39、若有网联自动驾驶车辆,则令n=n+1后,返回执行步骤六;
40、若没有网联自动驾驶车辆,则等待步骤六中同时换道的两个车辆均换道完成后,整个换道过程结束。
41、进一步地,所述交通事故影响区的长度s的计算方法为:
42、s=ω(t1-t0) (7)
43、式中,ω为发生交通事故后的路段交通波波速,t1表示交通事故对通行产生影响的结束时刻,t0表示交通事故对通行产生影响的开始时刻。
44、进一步地,所述发生交通事故后的路段交通波波速ω的计算方法为:
45、ω=uf[1-(k1+k2)/kj] (8)
46、式中,uf为隧道事故路段的自由流速度,k1为隧道事故路段的交通密度,k2为事故点上游的交通密度,kj为隧道的交通堵塞密度。
47、进一步地,所述换道车辆及目标车道后车的收益函数:
48、p=αis′i+(1-αi)ei+r (10)
49、q=αjs′j+(1-αj)ej+u (11)
50、其中,p表示换道车辆的收益,q表示目标车道后车的收益,s′i表示换道车辆的安全收益,ei表示换道车辆的效率收益,r表示换道车辆换道成功的奖励,s′j表示目标车道后车的安全收益,ej表示目标车道后车的效率收益,u表示目标车道后车的协作激励,αi和αj为权重系数。
51、进一步地,所述权重系数αi和αj为:
52、
53、
54、其中,jmax为跟驰行驶时当前交通环境中车辆最大的加加速度,jmin为跟驰行驶时当前交通环境中车辆最小的加加速度,ji为换道车辆当前的加加速度,jj为目标车道后车当前的加加速度。
55、进一步地,所述换道车辆的安全收益s′i的计算方法为:
56、s′i=(1-r)s′i-lk+rs′i-lc (14)
57、其中,r={0,1},r=0表示保持当前车道,r=1表示向目标车道换道;s′i-lk为保持当前车道行驶的行车安全收益,s′i-lc为换道的行车安全收益;
58、
59、其中,ail为换道车辆前车的加速度,vil为换道车辆前车的速度,li为换道车辆与事故点的距离,lil为换道车辆前车与事故点的距离,d为安全停止距离,l0为车辆长度,ttc*表示标准碰撞时间;
60、
61、其中,aj为目标车道后车的加速度,lj为目标车道后车与事故点的距离。
62、进一步地,所述目标车道后车的安全收益s′j的计算方法为:
63、当换道车辆不换道时:
64、
65、其中,ttc*表示标准碰撞时间,vk为目标车道前车的速度,ak为目标车道前车的加速度,lk为目标车道前车与事故点的距离;
66、当换道车辆换道时:
67、
68、进一步地,所述换道车辆的效率收益ei的计算方法为:
69、
70、其中,vlimit表示道路限速值,表示换道车辆选择换道后不与目标车道前车发生碰撞的最高车速,表示换道车辆保持当前车道行驶后不与前车发生碰撞的最高车速;
71、目标车道后车的效率收益ej的计算方法为:
72、
73、其中,表示目标车道后车让行后不与换道车辆发生碰撞的最高车速,表示目标车道后车不让行后不与前车发生碰撞的最高车速。
74、更进一步地,所述目标车道后车的协作激励u为:
75、
76、基于本发明的另一个方面,一种网联混行环境下隧道事故路段的协同换道系统,所述系统包括中央处理器、信息采集模块、网联通信模块、决策模块和控制模块;
77、所述信息采集模块和网联通信模块设置在网联人工驾驶车辆和网联自动驾驶车辆的内部;所述决策模块、控制模块仅设置在网联自动驾驶车辆的内部;
78、所述信息采集模块用于采集车辆的行驶状态、位置信息及道路信息;
79、所述网联通信模块用于车辆与车辆之间、中央处理器与车辆之间的通信;
80、所述中央处理器用于计算发生交通事故车辆的影响范围,并决策出需要换道的车辆;
81、网联自动驾驶车辆利用网联通信模块接收中央处理器的换道指令,网联人工驾驶车辆自行选择换道时机;
82、网联自动驾驶车辆内部的决策模块根据各车道的车流速度、位置信息作出换道决策;
83、所述控制模块用于根据换道决策输出控制指令,控制网联自动驾驶车辆换道。
84、本发明的有益效果是:
85、本发明针对网联自动驾驶车辆与网联人工驾驶车辆并存的驾驶环境,提出了网联混行环境下隧道事故路段的协同换道方法,更适用于车联网发展的进程。在单车换道决策中,通过计算临界安全距离,并与实际距离进行比较,可有效保证车辆换道过程的安全性。而且,针对隧道事故路段上游车必须换道的强制换道问题,在车辆能够安全完成换道的前提下,最大限度的利用道路资源,提高换道效率并减小对其他车辆的影响,从而提高隧道内的通行效率。
- 还没有人留言评论。精彩留言会获得点赞!