网联车专用车道设置下交通瓶颈上游车道的可变限速控制方法
本发明属于智能交通管理控制领域,具体是一种有网联车专用车道设置条件下的交通瓶颈上游车道可变限速控制方法。
背景技术:
1、在5g技术和车路协同技术的飞速发展下,网联自动驾驶汽车的研究正蓬勃兴起。这项前沿技术利用车辆间通信来实现实时信息共享,从而旨在提升交通流的效率和道路的安全性。网联车专用车道作为一项创新型的交通解决方案,正逐渐引起人们的关注。其概念在于创设专用车道,以促进自动驾驶车辆与传统驾驶车辆的分流,从而减少它们之间的相互干扰。然而,目前的研究停留在基本路段上网联车专用车道的规划问题,而忽略了专用车道设置下快速路交通瓶颈处的拥堵控制问题,这可能导致拥堵问题持续存在,无法充分协调交通流,且可能对环境产生不利影响,影响整体交通流动性。
技术实现思路
1、本发明为克服现有技术存在的不足之处,提供一种网联车专用车道设置下交通瓶颈上游车道的可变限速控制方法,以期能提高交通运行效率,减少因车道减少而集中换道增加的交通延误和驾驶风险,从而能指导车辆保持合理车速,帮助快速路瓶颈上游的车辆平稳流畅地通过。
2、本发明为达到上述发明目的,采用如下技术方案:
3、本发明一种网联车专用车道设置下交通瓶颈上游车道的可变限速控制方法的特点在于,在快速路主线上设置有若干个网联车专用车道和普通车道,其中,网联车专用车道位于所述快速路主线的内侧车道,且网联车专用车道只允许网联车通行,普通车道允许网联车和人工驾驶车通行;
4、将快速路主线上最外侧的普通车道数减少处的道路定为交通瓶颈,以车辆行驶方向为正方向,将交通瓶颈的上游主线车道按照行驶方向等分为i-1个路段,交通瓶颈位于第i个路段;每个路段的长度为l,令任意一个路段编号为i,i=1,2,...,i,将每条路段上的任意一条车道编号为j,车道由内侧向外侧依次编号为1,2,...,j,j表示车道总数,且第i个路段的车道数量小于j;将第i路段的第j车道称为单元(i,j);令λ(i,j)表示单元(i,j)的车道类型,若λ(i,j)=0,表示单元(i,j)为普通车道,若λ(i,j)=1,表示单元(i,j)为网联车专用车道;其特征在于,所述可变限速控制方法包括以下步骤:
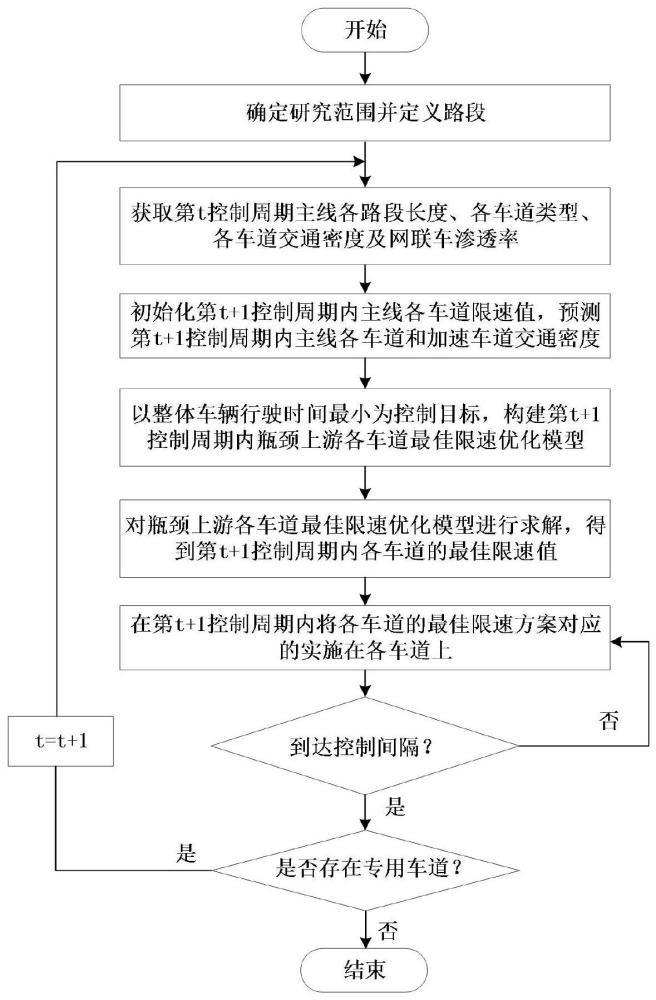
5、步骤1预测第t+1个控制周期下单元(i,j)的交通密度ki,j(t+1);
6、步骤1.1利用式(1)计算第t个控制周期下单元(i,j)的交通密度ki,j(t);
7、
8、式(1)中,ni,j(t)为第t个控制周期下单元(i,j)内的车辆数;
9、步骤1.2初始化第t+1个控制周期下所有单元的限速值,利用式(2)计算第t+1个控制周期下单元(i,j)向下游车道的发送能力si,j(t+1);
10、si,j(t+1)=min{ui,j(t+1)ki,j(t),ci,j(pi,j(t))} (2)
11、式(2)中,ui,j(t+1)为第t+1个控制周期下单元(i,j)的随机初始化的限速值,pi,j(t)为第t个控制周期下单元(i,j)的网联车渗透率,ci,j(pi,j(t))为第t个控制周期下单元(i,j)在网联车渗透率为pi,j(t)时的通行能力,并由式(3)获得;
12、
13、式(3)中,vm为路段的自由流速度,为第t个控制周期下单元(i,j)在网联车渗透率为pi,j(t)时的临界密度;
14、步骤1.3预测第t+1个控制周期下单元(i,j)内的人工驾驶车辆选择进入到下游单元(i+1,h)的概率
15、当j≠h时,通过式(4)得到第t+1个控制周期下单元(i,j)内人工驾驶车辆选择进入到下游单元(i+1,h)的概率
16、
17、式(4)中,ts为相邻控制周期的间隔;τd为人工驾驶车辆决定并执行变道所需的时间;ki,h(t)为第t个控制周期下单元(i,h)的交通密度;kjam为车道堵塞密度;λ(i+1,h)表示单元(i+1,h)的车道类型;
18、当j=h时,通过式(5)得到第t+1个控制周期下单元(i,j)内人工驾驶车辆选择进入到下游单元(i+1,h)的概率
19、
20、式(5)中,为第t+1个控制周期下单元(i,j)内的人工驾驶车辆选择进入到下游单元(i+1,g)的概率;
21、步骤1.4预测第t+1个控制周期下单元(i,j)内的网联车选择进入到下游单元(i+1,h)的概率
22、当j≠h时,通过式(6)得到第t+1个控制周期下单元(i,j)内网联车选择进入到下游单元(i+1,h)的概率
23、
24、式(6)中,τc为网联车决定并执行变道所需的时间;
25、当j=h时,通过式(7)得到第t+1个控制周期下单元(i,j)内网联车选择进入到下游单元(i+1,h)的概率
26、
27、式(7)中,为第t+1个控制周期下单元(i,j)内的网联车选择进入到下游单元(i+1,g)的概率;
28、步骤1.5利用式(8)得到第t+1个控制周期下期望从单元(i,j)选择进入到下游单元(i+1,h)的流量
29、
30、步骤1.6利用式(9)计算第t+1个控制周期下单元(i+1,h)的接收能力ri+1,h(t+1);
31、ri+1,h(t+1)=min{ωi+1,h(pi+1,h(t))(kjam-ki+1,h(t)),ci+1,h(pi+1,h(t))} (9)
32、式(9)中,pi+1,h(t)为第t个控制周期下单元(i+1,h)的网联车渗透率;ci+1,h(pi+1,h(t))为单元(i+1,h)在网联车渗透率为pi+1,h(t)时的通行能力;ωi+1,h(pi+1,h(t))为第t个控制周期下单元(i+1,h)的交通波速度,通过式(10)得到:
33、
34、式(10)中,为第t个控制周期下单元(i+1,h)的实际限速值;为单元(i+1,h)在网联车渗透率为pi+1,h(t)时的临界密度;
35、步骤1.7利用式(11)计算第t+1个控制周期下从单元(i,j)进入到下游单元(i+1,h)的流量
36、
37、式(11)中,表示第t+1个控制周期下期望从单元(i,g)选择进入到下游单元(i+1,h)的流量;
38、步骤1.8计算第t+1个控制周期下单元(i,j)的交通密度ki,j(t+1);
39、当i=1时,通过式(12)得到第t+1个控制周期下单元(i,j)的交通密度ki,j(t+1);
40、
41、式(12)中,di,j(t+1)为第t+1个控制周期下单元(i,j)上游车道的交通需求;表示第t+1个控制周期下从单元(i,j)进入到下游单元(i+1,h)的流量;
42、当i>1时,通过式(13)得到第t+1个控制周期下单元(i,j)的密度ki,j(t+1);
43、
44、式(13)中,表示第t+1个控制周期下从单元(i-1,h)进入到下游单元(i,j)的流量;
45、步骤2构建所述网联车专用车道设置下交通瓶颈上游车道的可变限速控制模型;
46、步骤2.1利用式(14)构建以第t+1个控制周期下总体车辆行程时间最小为控制目标的目标函数z(t+1);
47、
48、步骤2.2利用式(15)至式(17)构建可变限速模型的约束条件:
49、umin≤ui,j(t+1)≤umax (15)
50、
51、|ui,j(t+1)-ui+1,j(t+1)|≤δumax (17)
52、式(15)至式(17)中,umax和umin分别表示最大限速和最低限速,δumax表示最大速度差;为第t个控制周期下单元(i,j)的实际限速值;ui+1,j(t+1)为第t+1个控制周期下单元(i+1,j)的随机初始化的限速值;
53、步骤3利用遗传算法对所述车道可变限速模型进行求解,得到交通瓶颈上游车道在第t+1个控制周期下所有路段的所有车道的最佳限速值表示交通瓶颈上游车道在第t+1个控制周期下单元(i,j)的最佳限速值;
54、步骤4将最佳限速值在第t+1个控制周期下的间隔ts内,分别显示在各个路段对应的车道上,并作为第t+1个控制周期下各车道的实际限速值将t+1赋值给t后,转到步骤1。
55、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述可变限速控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
56、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述可变限速控制方法的步骤。
57、与已有技术相比,本发明的有益技术效果体现在:
58、1、本发明在混合驾驶环境下,以快速路系统车辆总运行时间最小为控制目标,构建瓶颈上游路段车道级最佳可变限速控制模型,从而求解出各车道最佳可变限速组合方案,帮助瓶颈上游车辆保持合理车速,顺畅通行,提高了交通运行效率和安全性。
59、2、本发明利用元胞传输思想将网联车专用车道和普通车道进行划分,分别计算和预测专用车道和普通车道的交通密度,从而提高了预测速度的准确性,优化了控制方法的计算效率。
60、3、本发明为快速路主线每条路段的所有车道提供个性化的可变限速方案,相较于传统的可变限速策略,本发明更加灵活且更容易调整可变限速方案。
- 还没有人留言评论。精彩留言会获得点赞!