一种基于车路协同的高速公路隧道口车速控制方法
本发明属于智能交通控制领域,具体涉及一种基于车路协同的高速公路隧道口车速控制方法。
背景技术:
1、道路交通安全问题严峻。根据世界卫生组织的数据,每年约有130万人因道路交通事故丧生。高速公路隧道是事故多发地点,死亡人数和个人重伤比例较高。统计数据显示,公路隧道入口区域的事故率大约是其他区域的五倍。白天隧道入口处的照度急剧下降,这种现象被称为视觉上的“黑洞效应”。亮度的突变迫使车辆在进入隧道前减速,增加了追尾的可能性。waldram于1962年首次研究了隧道入口处的“黑洞效应”概念。此外,事故发生后,由于报警延迟、后车减速时间不足等诸多因素,可能导致二次事故的发生。与普通交通事故相比,二次事故造成更严重的人员伤亡和更大的财产损失。因此,在隧道入口区域为车辆提供速度引导以确保安全驾驶至关重要。
2、近年来,vehicle-to-everything(v2x)通信技术快速发展,通过利用车辆和车辆/基础设施之间的双向信息通信,可以为速度引导或速度优化提供技术支持。现有智能网联车辆车速优化的研究多集中在间断流,如城市道路平面交叉口。以提高交通效率或实现节能减排为目标。已有研究中,车速优化通常可分为基于固定信号配时和与信号配时协同优化两方面研究,大多研究旨在最大限度减少能源消耗和污染物排放,如生态驾驶。例如,xiaozheng he等人提出了一种信号交叉口车速轨迹优化的多阶段最优控制模型,目标是最小化车辆总油耗。此外,他们还为该模型设计了一种近似求解方法(transportationresearch part c:emerging technologies,2015,61:106-120)。同时优化信号配时方案和车速的研究中,同济大学俞春晖等人提出了一个混合整数线性规划模型,为了最大限度地减少延误,他们在统一的框架内优化自动驾驶车辆的速度轨迹和城市交叉口交通信号(包括相位序列、绿灯启动和每个阶段的持续时间)(transportation research part b:methodological,2018,112:89-112)。
3、速度引导的研究多集中在城市道路交叉口,很少有研究针对高速公路车速引导。交叉口车速引导的模型和策略很难直接用于高速公路。主要有以下原因:首先,相比于高速公路,城市道路上车速较慢。城市道路上的车辆减速停止需要的时间较短,且车辆能够以较大的减速度减速。但在高速公路上由于车速较大,减速需要更长的时间和空间。车辆以较大减速度减速可能会导致严重的事故。其次,在交叉口,车辆根据信号灯的配时调整速度,车辆的速度引导有明确的依据时间。根据车辆到达交叉口的时间可以将速度引导分为红灯车速引导模型和绿灯车速引导模型。但在高速公路上,车辆进入隧道的时间不确定,因此在建模和求解中存在明显差异。此外,现有车速优化的模型大多针对全自动驾驶环境,假设所有车辆为自动驾驶车辆,但有研究预测,智能网联车辆渗透率在2060年后才能到到100%。基于全自动驾驶环境下开发的技术在很长一段时间内都不实用。因此,有必要在自动驾驶和人工驾驶混合交通流环境下,针对高速公路隧道区域开发车速引导模型。文献检索未发现有混合交通流下面向高速公路隧道入口区域车速优化的研究。
技术实现思路
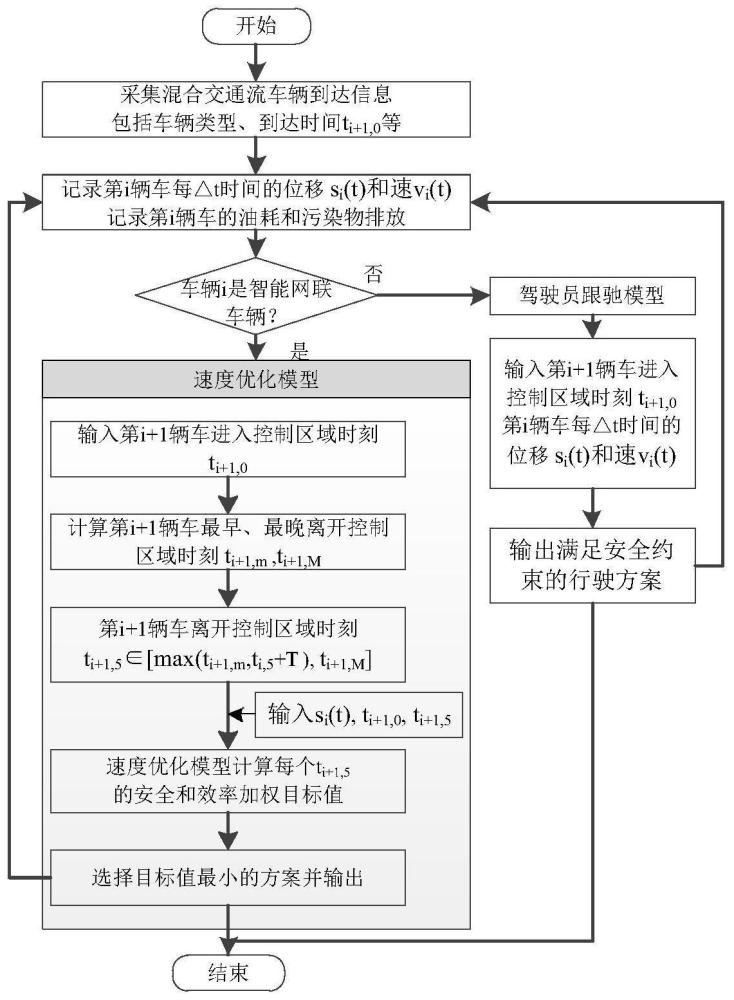
1、为了克服上述不足,本发明建立一种混合交通流下高速公路隧道入口区域车速控制方法。该方法考虑人工驾驶车辆和智能网联车辆混行的交通环境,通过智能驾驶模型计算人工驾驶车辆的速度轨迹,以前车每秒的速度和位移为输入条件,为智能网联车辆建立速度优化模型。建立安全约束,确保车辆在跟驰过程中的行车安全。
2、技术方案:为解决上述技术问题,本发明的一种基于车路协同的高速公路隧道口车速控制方法,具体步骤如下:
3、步骤1:采集到达隧道入口速度控制区域的人工驾驶车辆和智能网联车辆的位置、速度和所在车道信息;确定隧道入口速度控制区域的长度,用l表示,用l表示车道编号;采集车辆进入控制区域的时间,用ti,0表示,其中i∈il,il表示车道l上的车辆集合;il,cav表示车道l上的智能网联车辆集合,il,hv表示车道l上的人工驾驶车辆集合;
4、步骤2:针对智能网联车辆建立速度优化模型;
5、步骤3:采用驾驶员跟驰模型计算人工驾驶车辆的速度轨迹;
6、步骤4:构建前后车安全约束。
7、所述的步骤2,包括以下步骤:
8、步骤21:在为智能网联车辆建立的速度优化模型中,以安全、效率为目标,较大的车头时距更能保证安全,但会降低交通效率,因此通过加权法设置目标函数,如公式(1)所示:
9、
10、式中:ω表示安全和效率之间的权重,0≤ω≤1;il,cav表示车道l上智能网联车辆的集合;ti,i-1,t表示车辆i和前车i-1在t时刻的冲突时间;ti,0表示车辆i进入隧道口控制区域的时刻,为步骤1采集的已知信息;ti,5表示车辆i到达隧道口的时刻,为步骤2速度优化模型的决策变量;
11、步骤22:智能网联车辆速度优化模型主要优化车辆减速开始的时刻、减速度大小、减速持续的时间以及到达隧道口的时间;针对决策变量建立约束条件:车辆i在ti,1至ti,2时间段、ti,3至ti,4时间段分别以减速度ai,1和ai,2减速行驶,速度公式如式(2)-(3)所示;速度和减速度的取值范围如公式(4)-(5)所示:
12、
13、
14、
15、
16、式中:am为车辆的最大减速度;vm、vm分别表示车辆在高速公路上行驶的最小车速和最大车速;区别于城市道路交叉口车辆可以停车,在高速公路上车辆有最低限速且不能停车;ti,1,ti,2,ti,3,ti,4分别表示车辆i不同速度阶段开始或结束的时刻,其中ti,1和ti,2分别表示以ai,1减速度减速开始和结束的时刻,ti,3和ti,4分别表示以ai,2减速度减速开始和结束的时刻,ai,1,ai,2,am均为减速度大小,不带负号;不同时刻的关系如公式(6)所示:
17、ti,0≤ti,1≤ti,2≤ti,3≤ti,4≤ti,5 (6)
18、步骤23:在高速公路上,车辆行驶速度不能低于最小速度;因此,即使以最大减速度减速至最小速度行驶l距离,存在最长行驶时间ti,m和最短行驶时间ti,m,由公式(7)-(8)计算:
19、
20、
21、式中:l为隧道入口速度控制区域的长度;
22、车辆i到达隧道口的时间由前车到隧道口的时间ti-1,5和ti,m,ti,m共同决定,约束条件如公式(9)所示,t为安全车头时距:
23、
24、智能网联车辆i在t时刻的速度vi(t)、位移si(t)、加速度ai(t)分别由公式(10)-(12)计算:
25、
26、
27、
28、车辆到达隧道口时的位移等于控制区域的长度,约束如公式(13)所示:
29、
30、约束智能网联车辆以高速公路最小行驶速度进入隧道,如公式(14)所示:
31、
32、所述的步骤3,采用驾驶员跟驰模型计算人工驾驶车辆的速度轨迹,包括以下步骤:
33、步骤31:通过公式(15)计算人工驾驶车辆t时刻的加速度ai(t),公式(15)中的s*(vi(t),δvi,i-1(t))为期望跟车距离,由公式(16)计算:
34、
35、
36、式中:il,hv表示车道l上的人工驾驶车辆集合;am为车辆最大减速度;vi(t)为车辆i在t时刻的速度;vi,d为车辆i的期望车速;δ为加速度指数;si,i-1(t)为车辆i与车辆i-1的车距,s*(vi(t),δvi,i-1(t))为车辆i与车辆i-1的期望跟车距离,δvi,i-1(t)表示前后车速度差;ad为舒适减速度,t为安全车头时距;人工驾驶车辆的速度由公式(17)计算:
37、
38、式中δt为时间间隔。
39、所述的步骤4,构建前后车安全约束,包括以下步骤:
40、步骤41:在计算车辆i的速度轨迹时,前车i-1的速度和位移均为已知条件,作为输入;当t时刻前车i-1的车速小于车辆i时,即vi-1(t)<vi(t),有被后车追尾的可能性;因此要求车辆i和i-1在t时刻保持安全车头时距,ti,i-1,t由公式(18)计算:
41、
42、在控制区域内的车辆不允许超车,同一时刻前车的位移大于后车位移,约束如公式(19)所示:
43、
44、式中s0为最小车头间距。
45、本发明有益效果:
46、本发明方法面向智能网联车辆与人工驾驶车辆混合行驶的高速公路隧道入口区域。采用驾驶员跟驰模型计算人工驾驶车辆在隧道入口区域的速度轨迹。针对智能网联车辆,以到达隧道口的时间最短和安全加权为目标,建立车速优化模型;前车的位移和速度为输入条件,计算冲突时间,以此建立安全约束条件。本发明提出面向高速公路隧道入口区域混合交通流的速度控制方法,通过优化智能网联车辆速度,以及人工驾驶车辆参考前车行驶速度调整速度轨迹,应对“黑洞效应”,提高隧道入口的交通安全和效率。
- 还没有人留言评论。精彩留言会获得点赞!