一种ADS-B失效情况下飞行器短时轨迹预测方法与流程
本发明涉及计算机与智能交通,具体为一种ads-b失效情况下飞行器短时轨迹预测方法。
背景技术:
1、随着技术的不断进步,飞机在人类社会中的应用范围不断扩大,在民用领域,最典型的应用是用于在世界各地运送乘客的飞机,国际航空运输协会表示,航空运输和航空旅客需求依然强劲,未来20年,全球航空运输的年增长率约为4.4%,我国的空中交通量将增长3.5倍,这对空中交通管理提出了重大挑战,地面监测站目前使用雷达系统来观察飞机轨迹,然而,考虑到atm中的雷达系统已不能满足航空安全的需求,因此引入了一种非常有前途的下一代空中交通管制技术——自动相关监视广播技术,ads-b不像副雷达那样需要人工操作或查询,飞机自动将其位置、高度、速度、航向、识别号等信息广播到其他飞机或地面站,供管制员和飞行员监控飞机的状态,考虑到ads-b数据包含纬度,经度和高度信息,可用于观察飞机轨迹。
2、由于ads-b数据来源于gps系统而并非由航空器飞行控制系统自主推算得出其位置、高度、速度等航行诸元的重要信息,而gps系统很容易受到有意或无意的非法干扰,导致以gps系统数据信息为来源的ads-b数据的精度和完好性降低,甚至达不到管制运行的需要的标准,从而引起ads-b管制运行方式退出,一旦机载设备故障和局域网信号干扰,ads-b信号将消失或中断,这将给航空安全带来危险,所以,在ads-b发生故障时,对飞机的轨迹进行短期预测,可以提高繁忙空域的飞行安全性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种ads-b失效情况下飞行器短时轨迹预测方法,解决了gps系统很容易受到有意或无意的非法干扰的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种ads-b失效情况下飞行器短时轨迹预测方法,具体包括以下步骤:
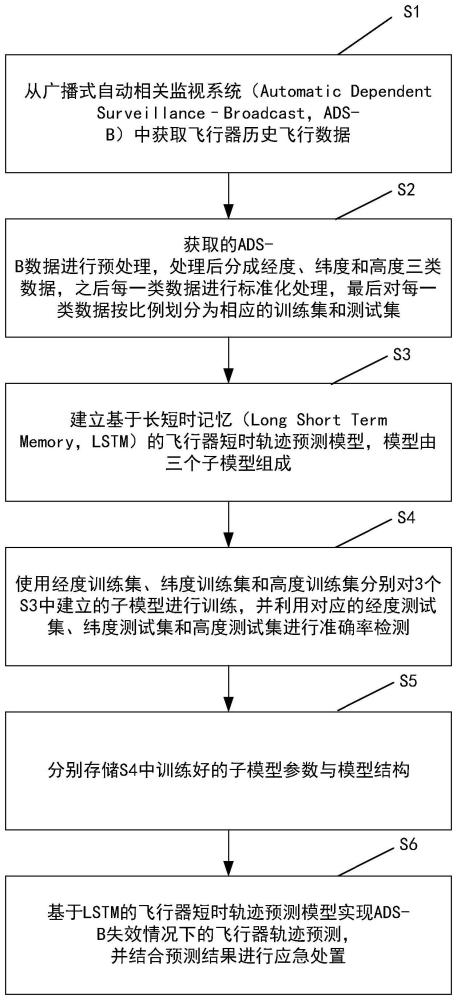
3、s1:从广播式自动相关监视系统中获取飞行器历史飞行数据;
4、s2:将获取到的ads-b数据进行预处理,处理后分成经度、纬度和高度三类数据,之后每一类数据进行标准化处理,最后对每一类数据按比例划分为相应的训练集和测试集;
5、s3:建立基于长短时记忆的飞行器短时轨迹预测模型,模型由三个子模型组成;
6、s4:使用经度训练集、纬度训练集和高度训练集分别对3个s3中建立的子模型进行训练,并利用对应的经度测试集、纬度测试集和高度测试集进行准确率检测;
7、s5:分别存储s4中训练好的子模型参数与模型结构;
8、s6:基于lstm的飞行器短时轨迹预测模型实现ads-b失效情况下的飞行器轨迹预测,并结合预测结果进行应急处置。
9、优选的,所述s1包括以下步骤:
10、s101:在起飞、巡航和降落阶段,以ads-b为数据来源,采集不同机型的飞行器历史飞行轨迹数据;
11、s102:采集的飞行器历史飞行轨迹数据为n条,每条包含x个轨迹数据采集点,每个采集点的时间戳为[t1,t2…ti-1,ti,ti+1…tx-1,tx],每个采集点之间的时间间隔为δt,在第i个采集点采集到的数据为
12、其中分别表示在ti时刻下飞行器的经度、纬度和高度值,n大于100,x大于50。
13、优选的,所述s2包括以下步骤:
14、s201:首先使用阈值法剔除数据中可能的错误数据,如负数、超过阈值过多的数据等,阈值法如下所示:
15、
16、其中,分别表示在ti时刻下飞行器的经度、纬度和高度值,thr表示飞行器的最大飞行高度;
17、s202:接着使用时间序列法对可能的缺失数据进行补全,直到数据中不再存在缺失数据为止,如下所示:
18、
19、其中,分别表示在ti时刻下飞行器的经度、纬度和高度值,i表示第i个采集点,m表示选择m组数据进行补全;
20、s203:之后使用历史均值法对数据进行降噪处理,以剔除数据中可能存在的干扰噪声;
21、
22、其中,分别表示在ti时刻下飞行器的经度、纬度和高度值,m表示选择m组数据进行降噪;
23、s204:如果对未标准化的数据直接进行训练,可能会导致模型对数值大的数据学习过多,而对数值小的数据训练不够充分,往往模型效果会不好,由于在上述s203步骤中已经事先将极端值或异常值剔除,因此可以使用离差标准化方法对经度、纬度和高度进行处理,以消除不同量纲对模型训练效果的影响,具体公式如下:
24、
25、其中xscaled表示离差标准化后的经度、纬度和高度数据,max表示数据集中的最大值,min表示数据集中的最小值;
26、s205:在完成数据预处理之后,按照4:1的比例,将飞行器历史飞行数据分为经度训练集、纬度训练集和高度训练集和经度测试集、纬度测试集和高度测试集。
27、优选的,所述s3包括以下步骤:
28、s301:根据如下公式建立lstm单元节点模型
29、
30、
31、
32、
33、
34、
35、其中和分别是lstm在第γ层,第β个神经单元的遗忘门、输入门和输出门;是当前神经单元的单元状态;cγ,β是当前神经单元的最终单元状态,即输出单元状态;hγ,β是当前神经单元的计算结果;σ是激活函数;w为权重矩阵;b为偏置矩阵;(hγ,β,v)为输入;*代表哈达码乘积;
36、s302:经过数据预处理后的训练集按照[batch_size,n_steps,n_features]格式输入至lstm层1,其中,batch_size表示样本数量,一般来讲,这个数量和训练结果的数量是一致的,不管是多参量还是单参量,或者是多个时间步长,对应的结果通常是确定的;n_steps表示步长,也即用n_steps个数据预测下一个数据;n_features表示每步包含的特征值;
37、s303:lstm层1的单元节点模型中隐藏层尺寸为80;
38、s304:lstm层1的输出结果传递到dropout层的输入,dropout比例设置为0.4;
39、s305:dropout层的输出结果传递到lstm层2,lstm层2的单元节点模型中隐藏层尺寸为80;
40、s306:lstm层2的输出结果传递到全连接层dense;
41、s307:将s302至s305的步骤重复3次,分别建立3个子模型,经度预测子模型、纬度预测子模型和高度预测子模型,这三个子模型分别预测经度、纬度和高度,以实现对飞行器位置的全面预测。
42、优选的,所述s4包括以下步骤:
43、s401:选择平均绝对值误差作为损失函数,选择自适应矩估计法对模型的权重值进行更新。mae计算公式如下:
44、
45、其中,t(j)代表实际值,代表预测值;
46、s402:训练过程中的超参数设置如下:批量训练数设置为32,训练集样本迭代次数设置为50,学习率设置为0.000001。
47、s403:经度、纬度和高度分开进行训练,首先使用经度训练集对经度预测子模型进行训练,当训练损失函数值低于阈值或者达到训练样本迭代次数的上限时,认为模型训练结束;
48、s404:其次使用纬度训练集对纬度预测子模型进行训练,当训练损失函数值低于阈值或者达到训练样本迭代次数的上限时,认为模型训练结束;
49、s405:最后使用高度训练集对高度预测子模型进行训练,当训练损失函数值低于阈值或者达到训练样本迭代次数的上限时,认为模型训练结束;
50、s406:使用mse、rmse和mape作为评价指标,分别利用经度测试集、纬度测试集和高度测试集对经度预测子模型、纬度预测子模型和高度预测子模型进行准确性检测,
51、
52、其中,t(j)代表实际值,代表预测值,
53、
54、其中,t(j)代表实际值,代表预测值,
55、
56、其中,代表实际值,代表预测值。
57、优选的,所述s5包括以下步骤:
58、s501:保存经度预测子模型的模型结构和参数;
59、s502:保存纬度预测子模型的模型结构和参数;
60、s503:保存高度预测子模型的模型结构和参数。
61、优选的,所述s6包括以下步骤:
62、s601:对航班的ads-b信号进行监视,自动存储其历史飞行轨迹;
63、s602:在发生ads-b失效的情况下,截取之前正常的ads-b数据进行轨迹预测;
64、s603:将经度、纬度和高度的预测结果反归一化处理,反归一化的计算公式如下:
65、ypred=(max-min)*y+min
66、式中,max代表数据集中的最大值,min代表数据集中的最小值,y代表预测值,ypred代表经过反归一化后的预测值;
67、s604:将s603中经过反归一化后的经度、纬度和高度预测值合成3维预测轨迹;
68、s605:管制员无线电广播通知该区域内的所有航空器ads-b信号不正常;
69、s606:管制员根据预测的3维轨迹,合理调度飞行器,减少交叉汇聚飞行,多采取高度调整,理顺飞行次序;
70、s607:及时询问航空器的位置、高度和其他信息,有疑问马上证实,确保不丢失航空器,直至ads-b信号恢复。
71、有益效果
72、本发明提供了一种ads-b失效情况下飞行器短时轨迹预测方法。与现有技术相比具备以下有益效果:该ads-b失效情况下飞行器短时轨迹预测方法,具体包括以下步骤:s1:从广播式自动相关监视系统中获取飞行器历史飞行数据;s2:将获取到的ads-b数据进行预处理,处理后分成经度、纬度和高度三类数据,之后每一类数据进行标准化处理,最后对每一类数据按比例划分为相应的训练集和测试集;s3:建立基于长短时记忆的飞行器短时轨迹预测模型,模型由三个子模型组成;s4:使用经度训练集、纬度训练集和高度训练集分别对3个s3中建立的子模型进行训练,并利用对应的经度测试集、纬度测试集和高度测试集进行准确率检测;s5:分别存储s4中训练好的子模型参数与模型结构;s6:基于lstm的飞行器短时轨迹预测模型实现ads-b失效情况下的飞行器轨迹预测,并结合预测结果进行应急处置;通过采用数据驱动的方法,结合大数据和神经网络技术,来解决传统方法无法有效处理的复杂情境,这种数据驱动方法在航空领域中尚属新颖,为解决复杂的轨迹预测问题提供了创新的方式,利用神经网络实现了智能的飞行轨迹预测,这种创新的方法使得飞行轨迹的预测更准确和可靠,能够适应不同情境和变化,从而提高了航空安全水平,在民航客机飞行实施阶段,当遇到紧急情况,例如机械故障、飞机失踪、遭受非法干扰或迫降,传统的ads-b数据可能失效进而导致飞行监控中断,从而增加事故风险,通过准确的轨迹预测,可以在失效时提供实时数据,能第一时间加强空地协同联动,为机组成员紧急预案的施展争取黄金时间,能够进一步保障飞行安全。
- 还没有人留言评论。精彩留言会获得点赞!