本发明涉及高速公路交通流量预测技术,尤其涉及一种基于etc门架数据的高速公路交通量预测方法。
背景技术:
1、随着交通运输行业改革和智慧交通技术体系发展,高速公路全面建设应用了etc电子不停车收费系统,实现联网收费。在全国etc收费体系构建过程中,在高速公路单元路段(即两个互通枢纽之间路段,也是高速公路最基础的、不可再次切分的线型结构单元)上布设了etc门架,在etc门架上安装部署了rsu天线、高清车牌识别、雷达、视频监监控等设备以全方位采集获取车辆通行状况,并支持精准计费。etc门架数据记录了所有车辆经过高速公路观测断面(即单元路段)的状态信息,也是当前在高速公路领域中行驶车辆数据采集体系中最高频、最精准也是布设面最广泛的数据来源。
2、交通流预测是交通管理和控制部门采取交通诱导措施的主要依据,是先进交通管理系统的关键组成部分,是实现交通规划、交通管理和交通控制的重要组成部分。同时,基于etc门架数据开展分析预测是交通流分析技术的新思路,但是目前业内尚无较为成型且有效的应用实践。
3、交通流预测(尤其是路网交通流)是一项具有挑战性的任务,因为复杂的空间依赖性和不同道路之间的时空模式的动态趋势。现有方法框架通常利用给定的空间邻接图和复杂的机制来对空间和时间相关性进行建模。但是,具有不完整相邻连接的给定空间图结构的有限表示可能会限制那些模型的有效时空依赖性学习。此外,过往基于arima、svm、knn等模型的传统预测方法只考虑了时间依赖性或只侧重学习局部空间相关性,而忽略了交通流的整体空间相关性。同时,在交通流数据预测中,某个时间的交通流量不仅与最近时段的交通流量有关,而且也与前溯特定周期的交通流量相关,充分反映了交通流数据的接近性、周期性和趋势性。因此,要从此类复杂且高度非线性的时空数据中发掘出时间与空间的模式,同时能够与实际问题相结合,就需要空间信息的整合并增强对时间多粒度特性的思考,从而进行更加精准的预测。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于etc门架数据的高速公路交通量预测方法解决了现有的交通流预测方法准确率不高,预测结果偏差幅度大、预测精度和长时间预测性能的下降程度明显的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于etc门架数据的高速公路交通量预测方法,包括以下分步骤:
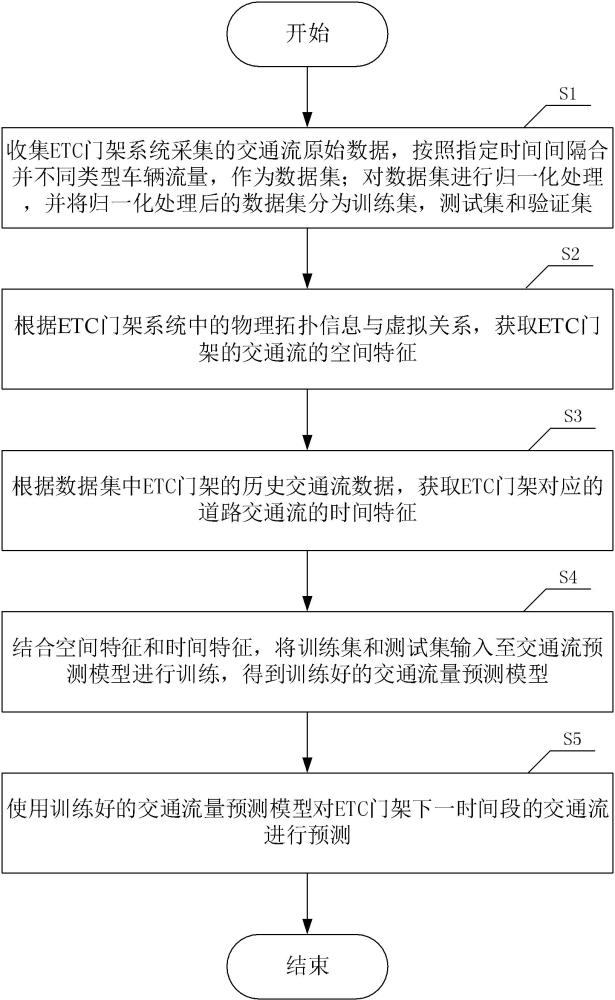
3、s1、收集etc门架系统采集的交通流原始数据,按照指定时间间隔合并不同类型车辆流量,作为数据集;对数据集进行归一化处理,并将归一化处理后的数据集分为训练集,测试集和验证集;
4、s2、根据etc门架系统中的物理拓扑信息与虚拟关系,获取etc门架的交通流的空间特征;
5、s3、根据数据集中etc门架的历史交通流数据,获取etc门架对应的道路交通流的时间特征;
6、s4、结合空间特征和时间特征,将训练集和测试集输入至交通流预测模型进行训练,得到训练好的交通流预测模型;
7、s5、使用训练好的交通流预测模型对etc门架下一时间段的交通流进行预测。
8、进一步地:所述步骤s1包括以下分步骤:
9、s11、收集etc门架系统中
p个门架相同时间范围内的交通流原始数据,指定时间间隔
q,根据时间间隔
q合并不同类型车辆流量,得到数据集
x,其表达式为:
10、
11、其中,表示编号为
p的etc门架在第
m个时间间隔的历史交通流数据;
12、s12、使用线性插值法补齐数据集
x的缺失值,对补齐缺失值的数据集进行最大最小归一化处理,并将归一化处理后的数据集分为训练集,测试集和验证集,最大最小归一化处理的表达式为:
13、
14、其中,表示补齐缺失值的数据集的第
i行第
j列,表示归一化处理后的数据集的第
i行第
j列,
xmax和
xmin分别为补齐缺失值的数据集中的最大值和最小值。
15、进一步地:所述步骤s2包括以下分步骤:
16、s21、获取etc门架系统中相邻关系,通过二进制编码来表示门架之间的连通性,并构建门架邻接矩阵
d;
17、s22、将单个etc门架作为高速公路图中的节点,etc门架之间的高速公路作为连接节点之间的边,通过阈值高斯核计算两个etc门架之间距离,得到地理邻接矩阵的权重,并根据每两个etc门架之间的权重,构建地理邻接矩阵
a,所述地理邻接矩阵的权重的表达式为:
18、
19、其中,
aij为地理邻接矩阵
a中的元素,为阈值,为方差,
dist(
i,
j)为门架传感器
i和门架传感器
j之间的距离;
20、s23、获取数据集中连续
t个时段的历史交通流数据,并根据各个etc门架历史交通流数据的相似度构建全局相关矩阵
c;
21、s24、根据etc门架邻接矩阵
d、地理邻接矩阵
a、全局相关矩阵
c计算k-hop矩阵;
22、s25、将不同阶数的k-hop矩阵进行拼接,作为etc门架的交通流的空间特征。
23、进一步地:所述步骤s23包括以下分步骤:
24、s231、获取数据集中连续
t个时段的历史交通流数据,采用pearson相关系数法来分析传感器之间的相关性,pearson相关系数法的表达式为:
25、
26、其中,
cij表示传感器
i与传感器
j的相关系数,代表第
i个门架的交通流特征,为的平均值;为的平均值,代表第
j个门架的交通流特征;
27、s232、计算每两个传感器之间的相关系数,构造全局相关矩阵
c,所述全局相关矩阵
c的表达式为:
28、;
29、s233、设置阀值
k,若全局相关矩阵
c中的元素大于阀值
k,则元素的值不变;否则将元素的值替换为0。
30、进一步地:所述步骤s24中,k-hop矩阵的表达式为:
31、
32、其中,*代表矩阵之间对应位置元素进行乘积,上标
k为阈值,为k-hop邻接图。
33、进一步地:所述步骤s25中,etc门架的交通流的空间特征的表达式为:
34、。
35、进一步地:所述步骤s3包括以下分步骤:
36、s31、将训练集中的数据划分为邻近时间、日和周三个时间窗口的数据;
37、s32、根据三个时间窗口的数据,分别得到邻近时间的时间序列数据、日相关时间序列数据和周相关时间序列数据;
38、s33、将邻近时间的时间序列数据、日相关时间序列数据和周相关时间序列数据分别输入至sbulstm模型,获取etc门架对应的道路交通流的时间特征。
39、进一步地:所述步骤32中,邻近时间的时间序列数据
xh的表达式为:
40、
41、其中,
t0表示当前时间,
th表示邻近时间的序列片段;
42、日相关时间序列数据
xd的表达式为:
43、
44、其中,
t0表示当前时间,
td表示日相关的序列片段,
q为每日采集次数,
tp表示预测窗口大小;
45、周相关时间序列数据
xw的表达式为:
46、
47、其中,
tw表示周相关的序列片段。
48、进一步地:所述步骤s4,交通流预测模型的训练过程中,使用平均绝对误差mae作为损失函数,采用adam作为优化器,更新模型参数直至模型收敛。
49、本发明的有益效果为:
50、1)对etc门架数据时间序列的连续性和周期性进行编码,以方便对交通数据的时间依赖性进行建模。通过对不同的策略进行组合,提出了不同时间编码方法,以得到更好的预测精确度。
51、2)本发明分别设计了邻接矩阵、地理邻接矩阵和全局相关矩阵可以使gcn网络更好的提取道路交通流量数据的空间特征并提高了模型全局时空相关分析的能力与有效地避免平滑问题,增强了对交通流波动的预测能力。
52、3)本发明提出了一种基于gcn-sbulstm的模型来解决序列数据中的复杂依赖关系,其中sbulstm被用来对时间依赖性进行建模,gcn则有助于空间依赖性的建模,gcn-sbulstm算法同时继承了gcn和sbulstm的优点,其并行结构有助于保持大部分时空信息的独立性,从而降低了它们相互干扰所带来的不确定性。