用于检测森林火灾的装置和方法与流程
背景技术:
1、用于检测和定位森林火灾的系统是已知的。为此目的,使用光学传感器对要监测的区域进行监测,所述光学传感器可以检测到森林火灾所形成的烟柱。这些传感器例如是可旋转相机,但所述传感器的缺点是其在夜间效果较差并且容易发生错误检测,例如在由农业活动造成的尘云的情形中。另外,光学系统通常只能在森林火灾已经严重并且在较远距离内烟柱都变得可见时检测到森林火灾。使用安装在卫星中的ir摄像机从高轨道进行监测的缺点是,摄像机在大距离内的分辨率对在早期阶段检测到森林火灾造成了阻碍。卫星的购买和维护也很昂贵,尤其在卫星发射时。由低轨道卫星进行监测的缺点是,所述卫星不是对地静止的,因此需要一定量的时间来完成一个轨道,在此期间所述区域不受监测。密网监测需要大数目的卫星,发射卫星的成本也很高昂。卫星监测还涉及其发射期间的高二氧化碳排放量。
2、因此,本发明的目的在于提供一种用于检测森林火灾的可靠且自动地工作的方法,所述方法可以根据需要来扩展,并且安装和维护成本低廉。本发明的目的还在于提供一种用于检测森林火灾的可靠且自动地工作的系统,所述系统可以根据需要扩展,并且安装及维护成本低廉。因此,本发明的目的还在于提供一种用于检测森林火灾的可靠且自动地工作的装置,所述装置可以根据需要来扩展,并且安装和维护成本低廉。因此,本发明的目的还在于提供一种用于检测森林火灾的可靠且自动地工作的自主单元,所述自主单元可以根据需要来扩展,并且安装和维护成本低廉。因此,本发明的目的还在于提供一种用于检测森林火灾的可靠且自动地工作的站,所述站可以根据需要来扩展,并且安装和维护成本低廉。
3、目的通过根据本发明的根据权利要求1的用于利用森林火灾检测站来检测和/或定位森林火灾的方法来实现。本发明的有利实施方案提供于从属权利要求中。
4、根据本发明的用于利用森林火灾检测站对森林火灾进行检测和/或灭火的方法具有四个步骤:在第一步骤中,接收信息。例如,信息包括对森林火灾的检测、其位置以及(如果适用)其蔓延速度和方向。在第二步骤中,生成控制命令。控制命令包含所接收信息和用于检测森林火灾的命令。在第三过程步骤中,发送控制命令和/或信息。在第四步骤中,实行森林火灾检测过程。
5、在本发明的进一步发展中,信息的接收发生在服务器单元上。服务器单元是用于检测和报告森林火灾的网络的一部分。网络优选地是具有星形架构的lorawan网络,其中借助于网关在第一森林火灾检测传感器与中央服务器单元之间交换消息包。
6、在本发明的另一实施方案中,从终端发送信息。森林火灾检测传感器是终端的一部分并被布置在所述终端中。终端经由单跳连接来连接到网关。
7、在本发明的另一实施方案中,经由网络来发送信息。网络优选地是具有星形架构的lorawan网络,其中借助于网关在终端与中央服务器单元之间交换消息包。
8、在本发明的另一实施方案中,信息包含分析的结果。例如,分析是气体分析和在森林火灾期间产生的气体的温度的记录。除了浓烟之外,森林火灾还会产生多种气体,特别是二氧化碳和一氧化碳。这些气体的类型及浓度是森林火灾的特性,并且可以使用合适传感器来检测。
9、在本发明的另一实施方案中,使用来自传感器的测量数据来实行分析。传感器例如是用于气体分析、用于记录气体的温度以及用于记录当前风向和风速的传感器阵列。
10、在本发明的另一方面中,测量数据被记录在终端上。传感器是终端的一部分并被布置在所述终端中。
11、在本发明的进一步发展中,在终端或服务器单元上实行分析。软件程序存储在服务器单元上的存储器中,所述软件可用于自动执行分析。
12、在本发明的另一实施方案中,依据信息来生成控制命令或用于生成控制命令的信息。控制命令发起对森林火灾的检测。
13、在本发明的另一实施方案中,发送控制命令或用于生成控制命令的信息。控制命令优选地在服务器单元上生成,并且经由ip连接和电缆发送到森林火灾检测装置。
14、在本发明的另一实施方案中,将控制命令或用于生成控制命令的信息从服务器单元发送到森林火灾检测装置。控制命令优选地在服务器单元上生成,并经由ip连接和电缆发送到森林火灾检测装置,并且发起用于检测森林火灾的过程。
15、在本发明的进一步发展中,经由网络来实行发送。网络优选地是具有星形架构的lorawan网络,其中借助于网关在第一森林火灾检测传感器与中央服务器单元之间交换消息包。
16、在本发明的另一实施方案中,森林火灾检测过程包括对森林火灾检测单元进行第一定位。森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源。
17、在本发明的另一实施方案中,森林火灾检测过程包括对火源进行定位。森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源。
18、在本发明的另一实施方案中,森林火灾检测过程包括森林火灾检测剂的喷射。森林火灾检测剂由森林火灾检测装置投放到火源上或火源周围半径范围内。
19、目的还可以通过根据本发明的森林火灾检测系统来实现。本发明的有利实施方案还陈述于从属权利要求中。
20、根据本发明的森林火灾检测系统包括网络装置、服务器单元和网关。森林火灾检测系统以使用lorawan网络技术的网状网关网络为特征。lorawan网络具有星形架构,其中借助于网关在传感器与中央互联网网络服务器之间交换消息包。
21、森林火灾检测系统具有经由单跳连接来连接到网关的多个传感器。网关通常是前端网关。前端网关连接到彼此并且部分地连接到边界网关。边界网关还可与前端网关组合以在一个设备中形成网状网关装置。边界网关经由有线连接或经由借助于互联网协议的无线连接来连接到互联网网络服务器ns。
22、根据本发明的森林火灾检测系统还具有第一终端,其中第一终端具有传感器单元。
23、另外,根据本发明的森林火灾检测系统具有第二终端,其中第二终端具有森林火灾检测元件。
24、在本发明的进一步发展中,网络是具有服务器、网关、第一终端和不同于第一终端的第二终端的lorawan网络。第二终端优选地是具有用于检测森林火灾的传感器和用于检测森林火灾的装置的森林火灾检测单元。
25、在本发明的另一实施方案中,第一终端具有传感器单元和/或第二终端具有森林火灾检测单元。第二终端优选地是具有用于检测森林火灾的传感器和用于检测森林火灾的装置的森林火灾检测单元。
26、在本发明的另一实施方案中,第一终端布置在固定位置中,例如,布置在要监测的森林中的树上。
27、在本发明的另一实施方案中,第一终端具有用于森林火灾检测的传感器、通信装置、储能装置和/或能量转换装置。因此,第一终端可以被独立操作,并且可以经由通信装置连接到中央网络服务器。传感器是用于气体分析、用于记录气体的温度以及用于记录当前风向和风速的传感器。
28、在本发明的另一实施方案中,第二终端是移动的,例如是能够飞行的无人驾驶飞行器。
29、在本发明的另一实施方案中,第二终端具有用于森林火灾检测的传感器、导航装置、驱动器和/或储能装置。导航传感器包括一个或多个摄像机和/或基于飞行时间的传感器,所述传感器用于在第二终端的移动期间检测障碍物。因此,第二终端能够避开这些障碍物。
30、在本发明的进一步发展中,第一终端的传感器不同于第二终端的传感器。优选地通过检测及分析森林火灾所产生的气体(烟雾)及其温度来实行使用第一终端对森林火灾的第一检测。第二检测使用与第一检测不同的方法,例如图像采集方法或用于检测颗粒的方法。使用图像捕获过程,可以更精确地检测火源;特别是可以更精确地记录火源的范围及其蔓延方向。成像过程优选地产生火源的热图像。
31、在本发明的另一实施方案中,网络具有中央服务器。控制对森林火灾的检测的可执行程序被存储在中央服务器上的存储器中。
32、在本发明的另一实施方案中,网络具有多个网关,其中网关是网状网关和/或边界网关。可以借助于网关在传感器与中央互联网网络服务器ns之间交换消息包。网状网关连接到彼此并且部分地连接到边界网关。边界网关经由有线连接或经由借助于互联网协议的无线连接来连接到互联网网络服务器。
33、目的还通过用于检测森林火灾的方法来实现。本发明的有利实施方案还陈述于从属权利要求中。
34、根据本发明的用于检测森林火灾的方法具有六个步骤:在第一步骤中,借助于第一森林火灾检测传感器来进行对火源的第一检测。第一森林火灾检测传感器可以是例如光学传感器、气体传感器、颗粒传感器和/或温度传感器。
35、在第二步骤中,最初进行对火源的第一定位。在最简单情形中,经由执行第一检测的第一森林火灾检测传感器的位置来完成定位。为此目的,必须知道第一森林火灾检测传感器的位置。例如,可以在安装第一森林火灾检测传感器的同时完成位置确定。第一森林火灾检测传感器可以例如布置在要监测的森林中的树上,并且第一森林火灾检测传感器的位置可以使用导航卫星系统(例如gnss(全球导航卫星系统))来确定一次。为此目的,可以使用可商购获得的gps系统或智能手机。
36、第三步骤涉及对第二森林火灾检测传感器进行定位。为此目的,在第四方法步骤中,第二森林火灾检测传感器优选地被设计为可移动的,并且被定位在与火源相距一定距离的位置处,使得第二森林火灾检测传感器实行对火源的第二检测。第二森林火灾检测传感器也可以像第一森林火灾检测传感器一样例如是光学传感器、气体传感器、颗粒传感器或温度传感器。除了检测火源之外,还可以使用第二森林火灾检测传感器来确定关于火源的进一步信息,例如火源的范围、蔓延方向和速度。
37、在第五步骤中,进行火源的第二定位。例如,可以通过确定第二森林火灾检测传感器的位置来确定对火源的定位,其中也借助于导航卫星系统(例如gnss(全球导航卫星系统))来确定第二森林火灾检测传感器的位置。由于第二森林火灾检测传感器在空间上接近于火源,因此第二定位确定火源的位置的错误率比对火源的第一定位低。
38、在第六步骤中,利用森林火灾检测单元来检测火源。由于借助于火源的第二定位,可以获得更精确定位及关于火源的额外信息,因此有可能对火源进行有针对性和早期检测以及后续扑灭。
39、为了本专利说明书的目的,森林火灾检测意指在所监测区域内对森林火灾的检测和/或对火源的检测。在本文件中,对森林火灾的定位不仅包括对森林火灾和/或火源的检测,还包括对森林火灾和/或火源的位置的确定。
40、为了本专利说明书的目的,扑灭森林火灾意味着对森林火灾进行检测、定位、遏制和/或灭火。检测包括辨识森林火灾和/或辨识受监控区域中的火源。在本文件中,对森林火灾的定位不仅包括对森林火灾和/或火源的检测,还包括对森林火灾和/或火源的位置的确定。
41、在本发明的发展中,第一森林火灾检测传感器是固定森林火灾检测传感器。第一森林火灾检测传感器可以例如布置在要监测的森林中的树上。
42、在本发明的有利实施方案中,第一森林火灾检测传感器是网络的终端和/或网关的一部分。优选地,网络是lorawan。lorawan网络架构通常以星形拓扑构建,其中网关充当透明桥接器,所述透明桥接器在终端与中央网络服务器、终端与后端之间转发消息。网关经由标准ip连接来连接到对应网络服务器,而终端对一个或甚至多个网关使用单跳无线通信(lora)。lorawan网络借助于终端与中央网络服务器之间的网关消息包来实施星形架构。网关经由标准互联网协议连接到网络服务器,而终端通过经由lora(啁啾频率扩展调制)或fsk(频率调制)的无线电与相应网关通信。
43、在本发明的另一实施方案中,第一森林火灾检测传感器是终端和/或网关的一部分,其中终端和/或网关是网络的一部分。终端具有第一森林火灾检测传感器,其中第一森林火灾检测传感器可以是传感器单元。第一森林火灾检测传感器的传感器单元具有多个传感器,可利用所述传感器来检测森林火灾。网络具有跨越要监控的区域而分布的一定数目的终端。
44、在本发明的另一实施方案中,第一森林火灾检测传感器通过检测及分析烟雾、气体、温度、颗粒或其他信息来检测火灾。除了浓烟之外,森林火灾还会产生多种气体,特别是二氧化碳和一氧化碳。另外,对气体的温度进行检测。除了森林火灾中产生的气体的类型和浓度之外,其温度也是森林火灾的一个指标。这些气体的类型和浓度是森林火灾的特性,并且可以使用合适传感器来检测和分析。相对于气体的成分的浓度分析由传感器单元记录的信号。如果气体浓度超标,就会检测到森林火灾。森林火灾中产生的气体的类型、成分和温度精确指示森林火灾的发生。这使得捕获正在发展的森林火灾并及时开始其检测成为可能。
45、在本发明的另一实施方案中,通过从存储器读取第一森林火灾检测传感器的位置和/或通过对定位装置和/或森林火灾检测传感器的位置进行三角测量来确定第一定位。
46、在最简单情形中,经由执行第一检测的第一森林火灾检测传感器的位置来完成定位。为此目的,必须知道第一森林火灾检测传感器的位置。例如,可以在安装第一森林火灾检测传感器的同时完成位置确定。第一森林火灾检测传感器可以例如布置在要监测的森林中的树上,并且第一森林火灾检测传感器的位置可以使用导航卫星系统(诸如gps(全球定位系统))来确定一次并被存储。
47、另一可能性是依据每一第一森林火灾检测传感器检测到森林火灾的个别时间来定位多个第一森林火灾检测传感器。森林火灾检测传感器所检测到的森林火灾信号可能各自具有不同时间戳,这意味着所述森林火灾信号可能是在不同时间被检测到的。信号的检测的差异可用于定位森林火灾。
48、在本发明的进一步发展中,第一定位的进行考虑了风向、风速、检测时间和/或信号的传播时间。例如,借助于多个第一森林火灾检测传感器来实行对森林火灾的定位,特别是依据每一第一森林火灾检测传感器检测到森林火灾的个别时间点来实行对森林火灾的定位。森林火灾检测传感器所检测到的森林火灾信号可能各自具有不同时间戳,这意味着所述森林火灾信号可能是在不同时间被检测到的。信号的检测的差异可用于定位森林火灾。由于森林火灾检测传感器检测到森林火灾的时间的知识,不仅可以更精确地确定森林火灾的位置,而且可以确定其传播速度。风向和风速为消防部队提供了森林火灾蔓延方向和速度的指示。因此,可以以有针对性和优先化方式使用对火源的检测。
49、在本发明的另一有利实施方案中,通过将第二森林火灾检测传感器定位成更靠近于第一检测时的第一森林火灾检测传感器的所定位火源来实行对第二森林火灾检测传感器的定位。因此,定位第二森林火灾检测传感器,使得其在对火源的第二检测以及第二定位期间比第一森林火灾检测传感器在对火源的第一检测以及第一次定位期间更靠近于火源。因此,以比对火源的第一检测和第一定位更大的精度实行对火源的第二检测和第二定位。
50、在本发明的另一实施方案中,执行第二检测的森林火灾检测传感器是第二森林火灾检测传感器。另外,第二森林火灾检测传感器被用于第一森林火灾检测传感器以定位森林火灾。第一森林火灾检测传感器执行对森林火灾的第一检测和第一定位,第二森林火灾检测传感器执行对森林火灾的第二检测和第二定位。
51、在本发明的有利发展中,第二森林火灾检测传感器的定位是自动进行的。可以例如借助于其中布置有森林火灾检测传感器的车辆或者森林火灾检测传感器就是此种车辆的车辆来实行定位。森林火灾检测传感器基于对森林火灾检测传感器的编程来执行自动化过程。
52、在本发明的另一实施方案中,第二森林火灾检测传感器的定位是自主进行的。实行定位使得第二森林火灾检测传感器在不受外界影响的情况下被独立定位。对障碍物(诸如树)进行检测、分析并主动避开。
53、在本发明的特别有利实施方案中,第二森林火灾检测传感器是移动森林火灾检测单元的一部分。由于这种有利布置,可以使用移动森林火灾检测单元在检测之后立即定位第二森林火灾检测传感器所检测到的森林火灾,并且因此向消防部队发出如何对森林火灾进行扑灭和/或灭火的精确指令。因此,可以有效地减少森林火灾的蔓延。
54、在本发明的另一实施方案中,利用第二森林火灾检测传感器来实行对火源的第二检测。另外,第二森林火灾检测传感器被用于第一森林火灾检测传感器以定位森林火灾。第一森林火灾检测传感器执行对森林火灾的第一检测和第一定位,第二森林火灾检测传感器执行对森林火灾的第二检测和第二定位。
55、在本发明的另一方面中,使用与第一检测不同的方法来实行对火源的第二检测。优选地通过检测和分析森林火灾产生的气体(烟雾)及其温度来实行使用第一森林火灾检测传感器对森林火灾的第一检测。第二检测使用了与第一检测不同的方法,例如图像捕获方法。
56、在本发明的进一步发展中,第二检测使用了图像捕获方法。使用图像捕获方法,可以更精确地检测火源;特别是可以更精确地记录火源的范围及其蔓延方向。成像过程优选地产生火源的热图像。
57、在本发明的另一实施方案中,使用第二森林火灾检测传感器的位置来确定火源的第二位置。借助于第二森林火灾检测传感器来实行第二定位,在第一定位时,第二森林火灾检测传感器位于比永久安装的第一森林火灾检测传感器距火源更短的距离处。因此,以比对火源的第一定位更高的精度来实行对火源的第二定位。
58、在本发明的进一步发展中,使用第二森林火灾检测传感器所记录的所测量值来实行对火源的第二定位。第二森林火灾检测传感器使用合适传感器(例如红外线传感器)结合导航传感器以比第一森林火灾检测传感器更大的准确度检测火源的位置。
59、在本发明的另一实施方案中,利用耦合到第二森林火灾检测传感器的控制单元来实行对火源的第二定位。控制单元被设计为具有控制软件的微控制器。控制单元查询第二森林火灾检测传感器,收集其所测量值并确定火源的位置。
60、在本发明的另一方面中,控制单元是森林火灾检测单元的一部分。特定来说,控制单元布置在森林火灾检测单元中。
61、在本发明的进一步实施方案中,第二定位的结果被发送到网络服务器。控制单元和/或连接到控制单元的通信单元将第二定位的结果发送到网络的中央网络服务器。
62、在本发明的进一步发展中,除了第二定位的结果之外,进一步数据还被发送到网络服务器。特定来说,发送了关于火灾蔓延的速度和方向的数据。
63、在本发明的另一实施方案中,使用耦合到第二森林火灾检测传感器的灭火单元对火源进行扑灭和/或灭火。第二森林火灾检测传感器有利地具有经耦合灭火单元,以便在火源的第二检测和第二定位之后立即并且有针对性地对火灾扑灭或灭火。
64、在本发明的进一步发展中,通过喷射灭火剂对火源进行扑灭和/或灭火。灭火单元具有填充有灭火剂的灭火剂储存器。将灭火剂从灭火剂储存器喷射到火源上。
65、在本发明的有利实施方案中,进行多次喷射。灭火剂被喷射,直到火源被灭火或灭火单元内的灭火剂耗尽为止。例如,次声波也可以用作灭火方法。
66、在本发明的进一步发展中,灭火剂在喷射之后分布在不同于喷射方向的方向上。这可以确保灭火剂以火源周围的一定半径分布,使得火灾的蔓延被减少。
67、在本发明的另一方面中,灭火单元是森林火灾检测单元的一部分。除了第二森林火灾检测传感器之外,森林火灾检测单元还具有灭火单元,以便在火源的第二检测和第二定位之后立即且有针对性地对火灾进行扑灭或灭火。
68、在本发明的另一实施方案中,定位第二森林火灾检测传感器以检测森林火灾、第二检测火源和第二定位火源的方法步骤被实行多次。使用森林火灾检测单元进行定位、第二检测、第二定位被重复,使得火源以低错误率被定位和检测。另外,蔓延速度和方向也在不断更新。因此可以更有效地检测火源。
69、在本发明的进一步发展中,定位第二森林火灾检测传感器以检测森林火灾、对火源进行第二检测、对火源进行第二定位以及对火源进行扑灭和/或灭火的方法步骤与数个森林火灾检测单元并行地实行。利用多个森林火灾检测单元,可以比仅利用一个森林火灾检测单元更有效地检测火源。
70、目的还可以通过根据本发明的森林火灾检测系统来实现。本发明的有利实施方案提供于从属权利要求中。
71、根据本发明的森林火灾检测系统具有用于检测森林火灾的第一森林火灾检测传感器。第一森林火灾检测传感器优选地布置在固定位置中,例如布置在要监测的森林中的树上。
72、另外,根据本发明的森林火灾检测系统具有适合并且旨在确定第一森林火灾检测传感器的位置的位置确定系统。位置确定系统例如在安装第一森林火灾检测传感器时确定第一森林火灾检测传感器的位置。第一森林火灾检测传感器可以例如布置在要监测的森林中的树上,并且第一森林火灾检测传感器的位置可以使用导航卫星系统(诸如gps(全球定位系统))来确定一次。为此目的,可以使用可商购获得的gps系统或智能手机。经由第一森林火灾检测传感器的位置来确定火源的位置。
73、根据本发明的森林火灾检测系统进一步包括第二森林火灾检测传感器和适合并旨在用于确定火源的位置的定位系统。第二森林火灾检测传感器被用于除了第一森林火灾检测传感器之外还用于定位森林火灾。第一森林火灾检测传感器对森林火灾执行第一检测和第一定位,第二森林火灾检测传感器对森林火灾执行第二检测和第二定位。定位系统检测以比第一森林火灾检测传感器低的错误率来检测火灾的源。
74、森林火灾检测系统还具有森林火灾检测单元。与第一森林火灾检测传感器相比,森林火灾检测单元优选地是移动的并且适合于除了第一森林火灾检测传感器之外还实行对火源的进一步检测。
75、在本发明的另一实施方案中,森林火灾检测系统包括具有终端、网关、服务器和森林火灾检测单元的网络。优选网络是lorawan。lorawan网络架构通常以星形拓扑构建,其中网关充当透明桥接器,所述透明桥接器在终端与中央网络服务器、终端与后端之间转发消息。网关经由标准ip连接来连接到对应网络服务器,而终端使用到一个或多个网关的单跳无线通信(lora)。lorawan网络使用终端与中央网络服务器之间的网关消息包来实施星形架构。网关(也称为集中器或基站)经由标准互联网协议连接到网络服务器,而终端通过经由lora(啁啾频率扩展调制)或fsk(频率调制)的无线电与相应网关通信。
76、在本发明的发展中,第一森林火灾检测传感器布置在固定位置中。第一森林火灾检测传感器优选地布置在例如要监测的森林的树上。
77、在本发明的另一实施方案中,第一森林火灾检测传感器是终端和/或网关的一部分。终端和/或网关具有第一森林火灾检测传感器,其中第一森林火灾检测传感器可以是传感器单元。第一森林火灾检测传感器的传感器单元具有多个传感器,可利用所述传感器来检测森林火灾。网络具有跨越要监测的区域而分布的多个终端和/或网关。
78、在本发明的有利实施方案中,可以使用森林火灾检测系统来记录或检索天气数据。例如,天气数据包括风速和风向。基于天气数据,可以预测火灾蔓延的方向和速度。
79、在本发明的另一实施方案中,火源的位置可以通过森林火灾检测系统的控制来确定。控制件具有其中存储了可以由控制单元执行的程序的存储器,所述程序确定火源的位置。
80、在本发明的另一实施方案中,森林火灾检测系统的位置确定系统已经存储固定元件的位置。森林火灾检测系统的固定元件例如是布置在终端和网关中的第一森林火灾检测传感器。例如,终端的位置永久地存储在网络服务器上。
81、在本发明的发展中,位置确定系统已经确定固定元件的位置。森林火灾检测系统的固定元件例如是布置在终端和网关中的第一森林火灾检测传感器。
82、例如,导航卫星系统被用于确定位置。例如,第一森林火灾检测传感器的所确定位置也永久地存储在网络服务器上。替代地或另外,可以使用导航卫星系统连续地或间歇地确定和存储第一森林火灾检测传感器的位置确定。
83、在本发明的另一实施方案中,第二森林火灾检测传感器是可移动的。借助于第二森林火灾检测传感器来实行对火源的第二定位,在第一定位时,第二森林火灾检测传感器位于比永久安装的第一森林火灾检测传感器距火源更短的距离处。因此,以比对火源的第一定位更高的精度来实行对火源的第二定位。
84、在本发明的有利实施方案中,第二森林火灾检测传感器是森林火灾检测单元的一部分。在第一森林火灾检测传感器对火源进行第一检测和定位之后,火源由第二森林火灾检测传感器来检测。
85、在本发明的另一实施方案中,第二森林火灾检测传感器包括图像捕获森林火灾检测传感器。使用图像捕获过程,可以更精确地检测火源;特别是可以更精确地记录火源的范围及其蔓延方向。图像捕获森林火灾检测传感器优选地创建火源的热图像。
86、在本发明的另一实施方案中,定位系统适合于并且旨在确定火源的位置。定位系统布置在第二森林火灾检测传感器中,所述第二森林火灾检测传感器位于比第一森林火灾检测传感器距火源更短的距离处。因此,对火源进行定位比使用第一森林火灾检测传感器对火源进行初始定位更精确。
87、在本发明的进一步发展中,定位系统适合于并且旨在确定火源相对于定位系统的位置的位置。定位系统布置在第二森林火灾检测传感器中,所述传感器是可移动的。火源的位置是相对于第二森林火灾检测传感器的位置来确定的并且具有低错误率。
88、在本发明的另一实施方案中,定位系统使用三角测量法进行位置确定,其中确定例如到森林火灾检测系统的固定元件(诸如第一森林火灾检测传感器和/或网关)的距离。
89、在本发明的另一实施方案中,第一控制件是网络的中央服务器的一部分。第一控制件是固定的并且是例如微计算机,并且具有存储器和微处理器以及合适软件。
90、在本发明的另一实施方案中,第二控制件是森林火灾检测单元的一部分。第二控制器具有存储器,其中可执行文件由第二控制器存储在所述存储器中,使得森林火灾检测单元能够操作。
91、在本发明的有利实施方案中,森林火灾检测单元被设计为机动化车辆。优选地,森林火灾检测单元能够飞行,使得其能够在短时间内覆盖更大距离。
92、在本发明的进一步发展中,森林火灾检测单元是无人驾驶飞行器和/或机器人。森林火灾检测单元优选地是无人操作的,并且使得能够自动和/或自主地检测火源。
93、在本发明的另一实施方案中,森林火灾检测单元包括第二森林火灾检测传感器、驱动单元、能量单元、导航单元、转向单元、控制单元和/或通信单元和/或灭火单元。森林火灾检测单元优选地是可以自动和/或自主地检测火源的能够飞行的无人驾驶飞行器。
94、在本发明的另一实施方案中,导航单元具有用于检测环境中的物体的导航传感器。导航传感器特别检测在森林火灾检测单元的移动期间可能出现的障碍物。因此,森林火灾检测单元能够绕过这些障碍物。
95、在本发明的进一步发展中,导航传感器是摄像机和/或基于飞行时间测量的传感器。导航传感器包括一个或多个摄像机和/或在第二终端的移动期间检测障碍物的基于飞行时间的传感器。障碍物由布置在森林火灾检测单元中的控制单元来检测、辨识和分析,使得森林火灾检测单元在移动期间自动地避开障碍物。
96、在本发明的另一实施方案中,基于飞行时间测量的传感器是雷达、超声波和/或lidar传感器。导航传感器包括一个或多个摄像机和/或在第二终端的移动期间检测障碍物的基于飞行时间的传感器。障碍物由布置在森林火灾检测单元中的控制单元来检测、辨识和分析,使得森林火灾检测单元在移动期间自动地避开障碍物。
97、在本发明的有利实施方案中,森林火灾检测系统具有森林火灾检测站。森林火灾检测站是用于装纳森林火灾检测单元的防风雨站。
98、在本发明的进一步发展中,森林火灾检测单元可以耦合到森林火灾检测站。森林火灾检测站被设计为连接到例如森林火灾检测单元的储能装置,以便为森林火灾检测单元的储能装置供应电能。
99、在本发明的另一实施方案中,可在森林火灾检测单元与森林火灾检测站之间交换数据、能量和/或灭火剂。森林火灾检测站被设计为连接到例如森林火灾检测单元的储能装置,以便为森林火灾检测单元的储能装置供应电能。另外,森林火灾检测单元还填充有灭火剂。替代地,次声波可被用于对火灾进行灭火。
100、目的还利用根据本发明的用于检测和/或定位森林火灾的方法来实现。本发明的有利实施方案陈述于从属权利要求中。
101、根据本发明的用于检测和/或定位森林火灾的方法具有三个方法步骤:在第一方法步骤中,检测森林区域中的森林火灾。为此目的,使用了优选地布置在网络中的多个森林火灾检测传感器。
102、在第二步骤中,对火源进行定位。例如,使用三角测量方法来实行定位。
103、在第三过程步骤中,对火源进行自动检测和/或定位。为此目的,使用了优选地能够飞行并具有适当传感器的森林火灾检测单元。
104、在本发明的进一步发展中,利用第一森林火灾检测传感器来检测火源。第一森林火灾检测传感器布置在固定位置中,例如布置在要监测的森林区域中的树上。
105、在本发明的另一实施方案中,依据第一森林火灾检测传感器所记录的数据、所存储数据、风向、风速和/或三角测量方法来布置火源。第一森林火灾检测传感器的传感器单元各自检测信号,所述信号的源是由森林火灾产生的气体,以及检测个别信号的个别时间。基于这些所检测信号以及其所记录检测时间来确定火源的位置。使用风向和风速,可能以低错误率进行位置确定。
106、在本发明的另一实施方案中,在火源已经被布置之后,开始自动森林火灾检测和/或定位过程。在已经定位到火源之后,例如通过使用能够飞行的无人驾驶飞行器作为森林火灾检测单元来立即开始自动森林火灾检测和/或定位过程。因此,在火灾发生之后可以立即开始对火源进行自动检测和/或定位。一旦已经定位到森林火灾位置,就可以可选地进行森林火灾扑灭。
107、在本发明的进一步发展中,森林火灾检测和/或定位过程的开始包括森林火灾检测单元的激活。森林火灾检测单元通常处于睡眠模式中以节省能量。仅当接收到信号时森林火灾检测单元才会激活,以开始森林火灾检测和/或定位过程。森林火灾检测装置还可选地用于森林火灾扑灭,并且在这种情形中配备有灭火剂。
108、在本发明的另一实施方案中,在已经定位到火源之后重新定位森林火灾检测单元。森林火灾检测单元优选地位于火源附近,使得可以检测和/或定位火源。
109、在本发明的另一实施方案中,对森林火灾检测单元的定位基于对火源的定位。森林火灾检测单元优选地位于火源附近,使得可以检测和/或定位火源。为此目的,必须尽可能准确地了解火灾的位置。第一森林火灾检测传感器的传感器单元检测和定位火源,并将位置数据发送到森林火灾检测单元。
110、在本发明的进一步发展中,在自动检测和/或定位火源之前进行对火源的第二定位。第二定位优选地利用第二森林火灾检测传感器来实行,所述第二森林火灾检测传感器位于火源附近,使得第二森林火灾检测传感器到火源的距离小于森林火灾的第一检测时第一森林火灾检测传感器的距离。
111、在本发明的另一方面中,在火源的第二定位之后,进行灭火单元的第二定位。由于第二定位,因此以比灭火单元的第一定位更高的精度来实行第二定位。
112、在本发明的另一实施方案中,通过将森林火灾检测单元定位在火源上方和/或其紧邻处来实行对火源的自动检测和/或定位。由于定位,以比森林火灾检测单元的第一定位更高的精度来实行自动检测定位。为此目的,例如使用gps来确定森林火灾扑灭单元的当前位置。此外,通过定位森林火灾检测单元来自动检测和/或定位火源所使用的传感器与利用第一森林火灾检测传感器不同。优选地这是ir摄像机。
113、目的还可以通过根据本发明的森林火灾检测装置来实现。本发明的有利实施方案陈述于从属权利要求中。
114、根据本发明的森林火灾检测装置包括火灾传感器、定位系统和自动检测单元。例如,以布置在网络中的多个森林火灾检测传感器被设计为检测森林火灾和/或火源。定位系统适合于并且旨在确定火源的位置。例如,使用三角测量方法来实行定位。自动检测单元具有用于检测火源的合适传感器。自动检测单元优选地是自动检测火源的能够飞行的无人驾驶飞行器的一部分。
115、在本发明的进一步发展中,火灾传感器、定位系统和/或自动检测单元被布置成可移动的。自动检测单元优选地是可自动检测和定位森林火灾并且可选地还可扑灭火源的能够飞行的无人驾驶飞行器的一部分。
116、在本发明的另一实施方案中,火灾传感器、定位系统和/或自动检测单元是机动化车辆的一部分。自动检测单元优选地是可自动检测和定位森林火灾并且可选地还可扑灭火源的能够飞行的无人驾驶飞行器的一部分。
117、在本发明的另一实施方案中,森林火灾检测装置包括森林火灾检测单元和/或森林火灾检测站。森林火灾检测站是用于装纳森林火灾检测单元的防风雨站。森林火灾检测单元包括火灾传感器和/或定位系统。
118、在本发明的另一实施方案中,森林火灾检测单元包括第二传感器、驱动单元、能量单元、导航单元、转向单元、控制单元和/或通信单元。森林火灾检测单元优选地是可自动检测和定位火源的能够飞行的无人驾驶飞行器。
119、目的还利用根据本发明的用于检测和/或定位森林火灾的方法来实现。本发明的有利实施方案还陈述于从属权利要求中。
120、根据本发明的用于检测和/或定位森林火灾的方法具有三个方法步骤:在第一方法步骤中,接收信息。例如,信息包括对森林火灾的检测、其位置以及(如果适用)其蔓延速度和方向。在第二步骤中,基于所接收信息来自主地定位森林火灾检测单元。在第三步骤中,利用森林火灾检测单元来检测和/或定位火源,例如使用能够飞行的无人驾驶飞行器作为森林火灾检测单元。因此,在形成火源之后可以立即开始对火源进行自动检测和/或定位。
121、在本发明的进一步发展中,信息包括位置数据,特别是森林火灾的位置和森林火灾检测单元的位置。
122、在本发明的另一实施方案中,信息被发送以供终端和/或中央服务器接收和/或供森林火灾检测装置接收。中央服务器例如是其中布置有多个森林火灾检测传感器的lorawan网状网关网络的网络服务器。森林火灾检测装置具有森林火灾检测单元。
123、在本发明的另一实施方案中,森林火灾检测装置包括森林火灾检测站和/或森林火灾检测单元。森林火灾检测站是用于装纳森林火灾检测单元的防风雨站。
124、在本发明的另一实施方案中,依据自身位置数据和目的地位置数据来确定路线。例如,在网络服务器上确定路线。路线包括作为森林火灾检测站的一部分的森林火灾检测单元的当前位置以及目标区域的位置,特别是火源的位置。
125、在本发明的另一方面中,森林火灾检测单元从森林火灾检测站解耦。在待机模式中,森林火灾检测单元固定地耦合到森林火灾检测站。
126、在本发明的发展中,森林火灾检测单元的马达被启动。马达优选地是借助于储能装置(电池)供应电能的电马达。
127、在本发明的另一实施方案中,森林火灾检测单元通过马达沿着特定路线移动。路线包括作为森林火灾检测站的一部分的森林火灾检测单元的当前位置以及目标区域的位置,特别是火源的位置。
128、在本发明的另一实施方案中,森林火灾检测单元检测沿着路线的障碍物。障碍物包括例如要监测的森林中的树,在森林火灾检测单元的移动期间可能会遇到所述障碍物。因此,森林火灾检测单元能够绕过这些障碍物。
129、在本发明的进一步发展中,森林火灾检测单元确定到目标的替代路线。森林火灾检测单元具有控制单元,所述控制单元基于所检测障碍物、森林火灾检测单元的当前位置和目标位置来确定绕行路线。
130、在本发明的另一实施方案中,森林火灾检测单元将继续在绕行路线上进行机动化移动。在森林火灾检测单元的移动期间,继续重复和执行对障碍物的检测、替代路线的确定和沿着替代路线的机动化移动。
131、在本发明的另一实施方案中,森林火灾检测单元在到达目标区域之后检测火源。基于对森林火灾的第一检测和定位,森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源。
132、在本发明的另一实施方案中,森林火灾检测单元在到达目标区域之后对火源进行定位。基于对森林火灾的第一检测和定位,森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源。
133、在本发明的有利发展中,森林火灾检测单元通过喷射灭火剂来对火源进行灭火。替代地,次声波也可以用作灭火剂。森林火灾检测单元具有灭火剂储存器。灭火剂例如是水或泡沫灭火剂。
134、在本发明的另一实施方案中,森林火灾检测单元的控制单元生成和/或执行用于检测火源、用于定位火源、用于移动森林火灾检测单元、用于对森林火灾检测单元进行导航、用于使森林火灾检测单元转向和/或用于喷射灭火剂的控制命令。控制单元被设计为微控制器并且具有带有控制软件的存储器和微处理器。
135、在本发明的另一实施方案中,前述步骤中的一或多者是自主实行的。森林火灾检测单元优选地是无人操纵的,并且被设计为可自主控制、能够飞行的无人驾驶飞行器。因此,可以在已经检测到火源之后很短时间内进行对火源的检测和灭火。
136、目的利用根据本发明的用于利用森林火灾检测站来检测和/或定位森林火灾地方法来实现。本发明的有利实施方案还陈述于从属权利要求中。
137、根据本发明的用于利用森林火灾检测站来检测和/或定位森林火灾的方法具有三个步骤:在第一步骤中,接收信息。信息包括例如对森林火灾的检测、其位置以及(如果适用)其蔓延速度和方向。在第二步骤中,森林火灾检测单元从森林火灾检测站解耦。森林火灾检测站是用于装纳森林火灾检测单元的防风雨站。在待机模式中,森林火灾检测单元固定地耦合到森林火灾检测站。在第三步骤中,利用森林火灾检测单元来检测和/或定位火源,例如使用能够飞行的无人驾驶飞行器作为森林火灾检测单元。因此,在检测到火源之后可以立即开始检测和/或定位火源。
138、在本发明的另一实施方案中,将信息从森林火灾检测单元转发到森林火灾检测站和/或从森林火灾检测站转发到森林火灾检测单元。
139、在本发明的进一步发展中,信息包括位置数据,特别是森林火灾的位置和森林火灾检测单元的位置。
140、在本发明的另一实施方案中,位置信息包括所检测森林火灾的位置或检测到森林火灾的传感器的位置。检测森林火灾的传感器通常布置在固定位置中,例如布置在要监测的森林中的树上。例如,在已经使用gnss或三角测量来确定之后,将检测森林火灾的传感器的位置存储在网络服务器上。
141、在本发明的另一实施方案中,森林火灾检测过程包括对森林火灾检测单元进行定位。森林火灾检测单元位于火源附近,使得森林火灾检测单元到火源的距离小于检测到森林火灾的传感器的距离。
142、在本发明的另一实施方案中,森林火灾检测过程包括从森林火灾检测单元的传感器获取传感器数据。传感器优选地是捕获火源的热图像的红外线摄像机。另外,用于气体分析的传感器还可布置在森林火灾检测单元中。
143、在本发明的发展中,森林火灾检测过程包括利用森林火灾检测单元来定位森林火灾的位置。因此,火源被更精确地定位并且可以被更有针对性地扑灭。
144、在本发明的另一实施方案中,森林火灾检测过程包括利用灭火剂来扑灭森林火灾。森林火灾检测单元包含灭火剂(例如水或泡沫灭火剂)或生成次声波的单元。
145、在本发明的另一实施方案中,灭火剂从森林火灾检测单元喷射。森林火灾检测单元包含喷射的灭火剂,诸如水或泡沫灭火剂。取决于火灾的范围及其蔓延方向和速度,喷射可能会发生多次。
146、在本发明的另一实施方案中,森林火灾检测单元在喷射灭火剂之后返回到森林火灾检测站。在森林火灾检测站处,森林火灾检测单元可以重新装载和重新补给灭火剂。
147、在本发明的进一步发展中,森林火灾检测单元在返回到森林火灾检测站之后耦合到森林火灾检测站。森林火灾检测单元通常进入睡眠模式中以节省能量。
148、在本发明的另一实施方案中,耦合包括森林火灾检测单元到森林火灾检测站的连接。通过连接到森林火灾检测站,森林火灾检测单元可以充入灭火剂、重新补给灭火剂,可以交换数据和信息,并且必要时还可以实行软件更新。
149、在本发明的另一实施方案中,森林火灾检测单元到森林火灾检测站的连接包括森林火灾检测单元到电力供应器的连接。森林火灾检测单元优选地是具有电推进力的能够飞行的无人驾驶飞行器。可以借助于布置在森林火灾检测站中的电力供应器再次为森林火灾检测单元供应电能。
150、在本发明的进一步发展中,森林火灾检测单元设置有能量。森林火灾检测单元优选地是具有电推进力的能够飞行的无人驾驶飞行器。可以借助于布置在森林火灾检测站中的电力供应器再次为森林火灾检测单元供应电能。
151、在本发明的另一实施方案中,森林火灾检测单元到森林火灾检测站的连接包括森林火灾检测单元到灭火剂储存器的连接。灭火剂例如是储存在森林火灾检测站中的一次性容器中的水或泡沫灭火剂。
152、在本发明的另一实施方案中,森林火灾检测单元装载有灭火剂。灭火剂例如是存储在森林火灾检测站中的可喷射容器中或者直接喷射的水或泡沫灭火剂。在已经检测到火源之后,森林火灾检测单元重新充入灭火剂并且准备好供再次使用。
153、在本发明的进一步发展中,解耦包括与能量(电力)供应器断开连接。森林火灾检测单元优选地是具有电驱动器的能够飞行的无人驾驶飞行器,所述无人驾驶飞行器由布置在森林火灾检测单元中的可再充电储能装置(电池)供电。
154、目的还可以利用根据本发明的自主森林火灾检测单元来实现。本发明的有利实施方案还陈述于从属权利要求中。
155、根据本发明的自主森林火灾检测单元具有导航单元、自主控制单元和定位单元。导航单元具有导航传感器以检测环境中的物体。导航传感器特别检测在森林火灾检测单元的移动期间可能出现的障碍物。因此,森林火灾检测单元能够绕过这些障碍物。控制单元被设计为微控制器并且具有带有控制软件的存储器和微处理器。定位单元具有用于定位森林火灾的合适传感器。优选地,这是ir传感器和/或ir摄像机。
156、在本发明的进一步发展中,自主森林火灾检测单元具有驱动器。森林火灾检测单元优选地是可自动检测火源的能够飞行的无人驾驶飞行器。驱动器优选地是电动的,并且具有可以用其驱动自主森林火灾检测单元的电马达和转子。
157、在本发明的另一实施方案中,自主森林火灾检测单元具有可控转向装置。自主森林火灾检测单元可以通过使转子枢转和使个别推进马达的速度变化来转向。
158、在本发明的另一实施方案中,自主森林火灾检测单元具有旨在用于并且适合用于检测火源的检测单元。优选地,检测使用了图像捕获方法,优选地捕获了火源的热图像。
159、在本发明的另一实施方案中,检测单元包括旨在用于并且适合用于检测森林火灾的检测传感器。优选地,检测使用了图像捕获方法,优选地捕获了火源的热图像。
160、在本发明的另一方面中,检测单元包括旨在用于并且适合用于定位森林火灾的定位传感器单元。定位传感器单元可用于确定火源相对于森林火灾检测单元的定位传感器单元的位置。另外,森林火灾检测单元的定位传感器单元的位置可以借助于导航卫星系统(例如gps)来确定。
161、在本发明的另一实施方案中,定位传感器单元、检测传感器单元、驱动器、可控转向装置、导航单元、导航传感器和/或通信单元耦合到自主控制单元。森林火灾检测单元的控制单元执行用于检测火源、用于定位火源、用于移动森林火灾检测单元、用于对森林火灾检测单元进行导航、用于使森林火灾检测单元转向和/或用于喷射灭火剂的控制命令。控制单元被设计为微控制器并且具有带有控制软件的存储器和微处理器。
162、在本发明的另一实施方案中,自主控制单元具有存储器,其中存储由自主控制单元可执行的程序,这使得自主森林火灾检测单元能够自主操作。
163、在本发明的另一实施方案中,自主控制单元具有用于控制自主森林火灾检测单元的软件程序。
164、目的还可以通过根据本发明的森林火灾检测站来实现。本发明的有利实施方案还陈述于从属权利要求中。
165、根据本发明的森林火灾检测站具有接收装置、能量源和用于可移动森林火灾检测单元的容纳器。森林火灾检测站被设计为容纳森林火灾检测单元,并且具有可在顶部处敞开或闭合的全方位风雨防护装置。顶部具有能量转换装置。储能装置(电池)布置在底侧上,所述储能装置通过能量转换装置充入电能。
166、在本发明的进一步发展中,森林火灾检测站具有接收器、能量源和/或灭火装置。接收器被设计为接收信息,特别是有关所检测火源的位置的信息。能量源优选地是具有储能装置的光伏系统。灭火装置具有多个可拆离容器,其具有灭火剂,例如泡沫灭火剂。替代地,直接投放灭火剂。
167、在本发明的另一实施方案中,森林火灾检测站包括移动森林火灾检测单元。为此目的,森林火灾检测单元被设计为优选地能够自主飞行的无人驾驶飞行器,并且具有带有由马达驱动的多个转子的驱动单元。马达通常是电马达,并且由可充电储能装置(电池)供电。
168、在本发明的另一实施方案中,森林火灾检测站和/或森林火灾检测单元包括灭火剂储存器。灭火剂储存器具有带有灭火剂(例如泡沫灭火剂)的多个可喷射容器,所述可喷射容器可布置在移动森林火灾检测单元中。替代地,将灭火剂泵入到森林火灾检测单元的罐中。
169、在本发明的有利实施方案中,森林火灾检测站和/或森林火灾检测单元包括电力连接装置和/或能量转换装置。能量源优选地是具有储能装置的光伏系统,使得森林火灾检测站可以独立于电力供应器而安装。
170、在本发明的进一步发展中,森林火灾探测站和/或森林火灾探测单元包括储能装置。储能装置(电池)通过能量转换装置充入电能。
171、在本发明的另一实施方案中,森林火灾检测站包括对森林火灾检测单元进行风雨防护。因此,布置在森林火灾检测站中的森林火灾检测单元以及布置在森林火灾检测站中的组件均受到保护而免受天气条件的影响。
172、在本发明的另一方面中,森林火灾检测站包括用于森林火灾检测单元的容纳器。森林火灾检测单元可以经由容纳器耦合到森林火灾检测站。容纳器被设计为连接到森林火灾检测单元的储能装置,以便对森林火灾检测单元的储能装置充入电能。
173、在本发明的另一实施方案中,森林火灾检测站和/或森林火灾检测单元包括控制单元。控制单元具有其中存储可由控制单元执行的程序的存储器,所述程序使得森林火灾检测站能够操作。
174、在本发明的另一实施方案中,森林火灾检测站和/或森林火灾检测单元包括通信单元。通信单元被用于接收信息(例如,所检测火源的位置数据)并发送信息(例如,有关森林火灾检测站的状况的数据)。
175、目的还利用根据本发明的用于利用森林火灾检测站来检测和/或定位森林火灾的方法来实现。本发明的有利实施方案陈述于从属权利要求中。
176、根据本发明的用于利用森林火灾检测站对森林火灾进行检测和/或灭火的方法具有四个步骤:在第一步骤中,接收信息。例如,信息包括对森林火灾的检测、其位置以及(如果适用)其蔓延速度和方向。在第二步骤中,生成控制命令。控制命令包含所接收信息和用于检测森林火灾的命令。在第三步骤中,发送控制命令和/或信息。在第四步骤中,实行森林火灾检测过程。
177、在本发明的进一步发展中,信息的接收发生在服务器单元上。服务器单元是用于检测和报告森林火灾的网络的一部分。网络优选地是具有星形架构的lorawan网络,其中借助于网关在第一森林火灾检测传感器与中央服务器单元之间交换消息包。
178、在本发明的另一实施方案中,从终端发送信息。森林火灾检测传感器是终端的一部分并被布置在所述终端中。终端经由单跳连接来连接到网关。
179、在本发明的另一实施方案中,经由网络来发送信息。网络优选地是具有星形架构的lorawan网络,其中借助于网关在终端与中央服务器单元之间交换消息包。
180、在本发明的另一实施方案中,信息包含分析的结果。例如,分析是气体分析和在森林火灾期间产生的气体的温度的记录。除了浓烟之外,森林火灾还会产生多种气体,特别是二氧化碳和一氧化碳。这些气体的类型和浓度是森林火灾的特性,并且可以使用合适传感器来检测和分析。
181、在本发明的另一实施方案中,使用来自传感器的测量数据来实行分析。传感器例如是用于气体分析、用于记录气体的温度以及用于记录当前风向和风速的传感器阵列。
182、在本发明的另一方面中,测量数据被记录在终端上。传感器是终端的一部分并被布置在所述终端中。
183、在本发明的进一步发展中,在终端或服务器单元上实行分析。软件程序存储在服务器单元上的存储器中,所述程序可用于自动执行分析。
184、在本发明的另一实施方案中,依据信息来生成控制命令或用于生成控制命令的信息。控制命令发起对森林火灾的检测。
185、在本发明的另一实施方案中,发送控制命令或用于生成控制命令的信息。控制命令优选地在服务器单元上生成,并且经由ip连接和电缆发送到森林火灾检测装置。
186、在本发明的另一实施方案中,将控制命令或用于生成控制命令的信息从服务器单元发送到森林火灾检测装置。控制命令优选地在服务器单元上生成,并经由ip连接和电缆发送到森林火灾检测装置,并且发起用于检测森林火灾的过程。
187、在本发明的进一步发展中,经由网络来实行发送。网络优选地是具有星形架构的lorawan网络,其中借助于网关在第一森林火灾检测传感器与中央服务器单元之间交换消息包。
188、在本发明的另一实施方案中,森林火灾检测过程包括对森林火灾检测单元进行第一定位。森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源。
189、在本发明的另一实施方案中,森林火灾检测过程包括对火源进行定位。森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源。
190、在本发明的另一实施方案中,森林火灾检测过程包括森林火灾检测剂的喷射。灭火剂由森林火灾检测单元投放到火源上或投放在火源周围半径范围内。替代地,也可以利用次声波来扑灭森林火灾。
191、目的还可以通过根据本发明的森林火灾检测系统来实现。本发明的有利实施方案还陈述于从属权利要求中。
192、根据本发明的森林火灾检测系统包括网络装置、服务器单元和网关。森林火灾检测系统以使用lorawan网络技术的网状网关网络为特征。lorawan网络具有星形架构,其中借助于网关在传感器与中央互联网网络服务器之间交换消息包。
193、森林火灾检测系统具有经由单跳连接来连接到网关的大数目的传感器。网关通常是前端网关。前端网关连接到彼此并且部分地连接到边界网关。边界网关还可与前端网关组合以在一个装置中形成网状网关装置。边界网关经由有线连接或经由借助于互联网协议的无线连接来连接到互联网网络服务器。
194、根据本发明的森林火灾检测系统还具有第一终端,其中第一终端具有传感器单元。
195、另外,根据本发明的森林火灾检测系统具有第二终端,其中第二终端具有森林火灾检测元件。
196、在本发明的进一步发展中,网络是具有服务器、网关、第一终端和不同于第一终端的第二终端的lorawan网络。第二终端优选地是具有用于检测森林火灾的传感器和用于检测森林火灾的装置的森林火灾检测单元。
197、在本发明的另一实施方案中,第一终端具有传感器单元和/或第二终端具有森林火灾检测单元。第二终端优选地是具有用于检测森林火灾的传感器和用于检测森林火灾的装置的森林火灾检测单元。
198、在本发明的另一实施方案中,第一终端布置在固定位置中,例如,布置在要监测的森林中的树上。
199、在本发明的另一实施方案中,第一终端具有用于森林火灾检测的传感器、通信装置、储能装置和/或能量转换装置。因此,第一终端可以被独立操作,并且可以经由通信装置连接到中央网络服务器。传感器是用于气体分析、用于记录气体的温度以及用于记录当前风向和风速的传感器。
200、在本发明的另一实施方案中,第二终端是移动的,例如是能够飞行的无人驾驶飞行器。
201、在本发明的另一实施方案中,第二终端具有用于森林火灾检测的传感器、导航装置、驱动器和/或储能装置。导航传感器具有一个或多个摄像机和/或基于飞行时间的传感器,所述传感器在第二终端的移动期间检测障碍物。因此,第二终端能够避开这些障碍物。
202、在本发明的发展中,第一终端的传感器不同于第二终端的传感器。优选地通过检测和分析森林火灾所产生的气体(烟雾)及其温度来实行使用第一终端对森林火灾的第一检测。第二检测使用与第一检测不同的方法,例如图像捕获方法或用于检测颗粒的方法。使用图像捕获方法,可以更精确地检测到火源,特别是可以更精确地记录火源的范围及其蔓延方向。成像过程优选地产生火源的热图像。
203、在本发明的另一实施方案中,网络具有中央服务器。控制对森林火灾的检测的可执行程序被存储在中央服务器上的存储器中。
204、在本发明的另一实施方案中,网络具有多个网关,其中网关是网状网关和/或边界网关。借助于网关在传感器与中央互联网网络服务器之间交换消息包。网状网关连接到彼此并且部分地连接到边界网关。边界网关经由有线连接或经由借助于互联网协议ip的无线连接来连接到互联网网络服务器ns。
205、目的还可以利用根据本发明的森林火灾检测单元来实现。本发明的有利实施方案陈述于从属权利要求中。
206、根据本发明的森林火灾检测单元具有驱动器和旨在用于并且适合用于检测火源的检测单元。森林火灾检测单元优选地被设计为能够自主飞行的无人驾驶飞行器,并且具有带有由马达驱动的多个转子的推进单元。马达通常是电马达,并且由可充电储能装置(电池)供电。检测单元优选地是用于捕获热图像的红外线摄像机。另外,根据本发明的森林火灾检测单元具有导航单元和定位单元。定位单元具有用于定位森林火灾的合适传感器。导航单元检测森林火灾检测单元附近的物体。
207、在本发明的发展中,检测单元具有旨在用于并且适合用于辨识森林火灾的检测传感器单元。检测单元优选地是用于捕获热图像的红外线摄像机。
208、在本发明的另一实施方案中,检测单元具有旨在用于并且适合用于定位森林火灾的定位传感器单元。定位传感器单元可用于确定火源相对于森林火灾检测单元的定位传感器单元的位置。另外,森林火灾检测单元的定位传感器单元的位置可以借助于导航卫星系统(例如gps)来确定。
209、在本发明的另一实施方案中,定位传感器单元耦合到控制单元。控制单元具有存储在存储器中用于自动定位森林火灾的程序。
210、在本发明的另一实施方案中,检测单元耦合到控制单元。控制单元具有存储在存储器中用于自动检测森林火灾的程序。
211、在本发明的特别有利实施方案中,森林火灾检测单元具有飞行驱动器。森林火灾检测单元被设计为优选地能够自主飞行的无人驾驶飞行器,并且具有带有由马达驱动的多个转子的推进单元。
212、目的还利用根据本发明的用于利用森林火灾检测站来检测和/或定位森林火灾的方法来实现。本发明的有利实施方案还陈述于从属权利要求中。
213、根据本发明的用于利用森林火灾检测站来检测和/或定位森林火灾的方法具有三个步骤:在第一步骤中,接收信息。例如,信息包括对森林火灾的检测、其位置以及(如果适用)其蔓延速度和方向。在第二步骤中,森林火灾检测单元从森林火灾检测站解耦。森林火灾检测站是用于装纳森林火灾检测单元的防风雨站。在待机模式中,森林火灾检测单元固定地耦合到森林火灾检测站。在第三步骤中,启动森林火灾检测过程以例如通过使用能够飞行的无人驾驶飞行器作为森林火灾检测单元来检测和/或定位森林火灾。因此,在已经检测到火源之后可以立即开始对火源进行自动检测和/或定位。
214、在本发明的进一步发展中,森林火灾检测过程包括启动森林火灾检测单元。在待机模式中,森林火灾检测单元固定地耦合到森林火灾检测站。森林火灾检测单元被设计为在森林火灾检测过程开始时从森林火灾检测站发射的能够自主飞行的无人驾驶飞行器。
215、在本发明的另一实施方案中,森林火灾检测过程包括在第一位置中移动森林火灾检测单元。森林火灾检测单元位于火源附近,使得森林火灾检测单元借助于合适传感器(优选地红外线摄像机)来检测火源并允许对森林火灾进行检测。
216、在本发明的另一实施方案中,在移动森林火灾检测单元之后的第一位置到森林火灾的距离与森林火灾检测站不同。通常,森林火灾检测站到森林火灾的距离大于森林火灾检测单元到森林火灾的距离。
217、在本发明的另一实施方案中,森林火灾检测过程包括由森林火灾检测单元对森林火灾进行检测。森林火灾检测单元使用传感器(例如红外线摄像机)来检测火源。
218、在本发明的另一实施方案中,森林火灾检测过程包括通过森林火灾检测单元对森林火灾进行定位。通过森林火灾检测单元的定位传感器单元,可以确定火源相对于森林火灾检测单元的定位传感器单元的位置。
219、在本发明的发展中,利用图像捕获方法来进行定位,优选地捕获了火源的热图像。
220、在本发明的另一实施方案中,在森林火灾检测单元已定位到森林火灾之后,将森林火灾检测单元移动到第二位置。在第二位置中,森林火灾检测装置经定位使得有可能检测到森林火灾。
221、在本发明的另一实施方案中,灭火过程发生在到达森林火灾检测单元的第一位置和/或第二位置之后。为此目的,喷射布置在森林火灾检测单元中的灭火剂。
222、在本发明的进一步发展中,灭火过程发生了数次。取决于火源的范围及其蔓延方向和速度,要数次实行灭火过程以便彻底对森林火灾进行灭火。
223、在本发明的另一实施方案中,在已经实行灭火过程之后,将森林火灾检测单元移动到森林火灾检测站。在检测到火源之后,特别是在投放灭火剂之后,森林火灾检测单元返回到森林火灾检测站以便进行燃料补给并填充有灭火剂。例如,当利用次声波扑灭森林火灾时,燃料补给可以采用能量的形式。
224、在本发明的进一步实施方案中,森林火灾检测单元耦合到森林火灾检测站。森林火灾检测单元耦合到森林火灾检测站,使得森林火灾检测单元耦合到森林火灾检测站的电力供应器。
225、在本发明的有利发展中,在将森林火灾检测站与森林火灾检测单元耦合之后,森林火灾检测单元从森林火灾检测站充入能量和/或灭火剂。森林火灾检测单元利用电能来进行燃料补给。另外,森林火灾检测单元连接到森林火灾检测站的灭火剂储存器。森林火灾检测单元还装载有灭火剂。
226、在本发明的有利实施方案中,森林火灾检测系统具有森林火灾检测站。森林火灾检测站是用于装纳森林火灾检测单元的防风雨站。
227、在本发明的另一实施方案中,森林火灾检测单元包括第二传感器、驱动单元、能量单元、导航单元、转向单元、控制单元、通信单元和/或定位单元。森林火灾检测单元优选地是自动检测火源的飞行中无人驾驶飞行器。
228、在本发明的发展中,导航单元具有用于检测环境中的物体的导航传感器。导航传感器特别检测在森林火灾检测单元的移动期间可能出现的障碍物。因此,森林火灾检测单元能够绕过这些障碍物。
229、在本发明的进一步发展中,导航传感器是摄像机和/或基于飞行时间测量的传感器。导航传感器包括一个或多个摄像机和/或在森林火灾检测单元的移动期间检测障碍物的基于飞行时间的传感器。通过布置在森林火灾检测单元中的控制单元对障碍物进行检测、辨识和分析,使得森林火灾检测单元在移动期间自动避开障碍物。
230、在本发明的另一实施方案中,基于飞行时间测量的传感器是雷达、超声波和/或lidar传感器。导航传感器包括一个或多个摄像机和/或在森林火灾检测单元的移动期间检测障碍物的基于飞行时间的传感器(诸如雷达、超声波和/或lidar)。通过布置在森林火灾检测单元中的控制单元对障碍物进行检测、辨识和分析,使得森林火灾检测单元在移动期间自动避开障碍物。
231、在本发明的另一实施方案中,可以自主控制森林火灾检测单元。森林火灾检测单元优选地是无人操作的,并且使得能够自动和/或自主地检测火源。
232、在本发明的有利实施方案中,森林火灾检测单元具有灭火剂储存器。灭火剂例如是水或泡沫灭火剂。
233、在本发明的另一实施方案中,森林火灾检测单元具有用于灭火剂的施配和/或喷射装置。将灭火剂从灭火剂储存器喷射到火源上。
234、在本发明的另一实施方案中,森林火灾检测站具有旨在用于并且适合用于接纳森林火灾检测单元的容纳器。森林火灾检测站被设计为连接到例如森林火灾检测单元的储能装置,以便为森林火灾检测单元的储能装置供应电能。
235、在本发明的另一方面中,森林火灾检测站具有控制单元、风雨防护单元、储能装置、灭火剂储存器和/或通信单元。森林火灾检测站被设计为连接到例如森林火灾检测单元的储能装置,以便为森林火灾检测单元的储能装置供应电能。另外,森林火灾检测单元还填充有灭火剂。
236、在本发明的发展中,信息包括位置数据,特别是森林火灾的位置和森林火灾检测单元的位置。
237、根据本发明的用于自主检测和/或定位森林火灾的方法和根据本发明的森林火灾检测系统的示范性实施方案以简化形式示意性地展示在附图中,并且在以下描述中被更详细地解释。
238、特定来说:
239、图1展示森林火灾检测系统
240、图2展示根据本发明的森林火灾检测系统的详细视图
241、图3展示森林火灾检测单元
242、图4展示森林火灾检测装置
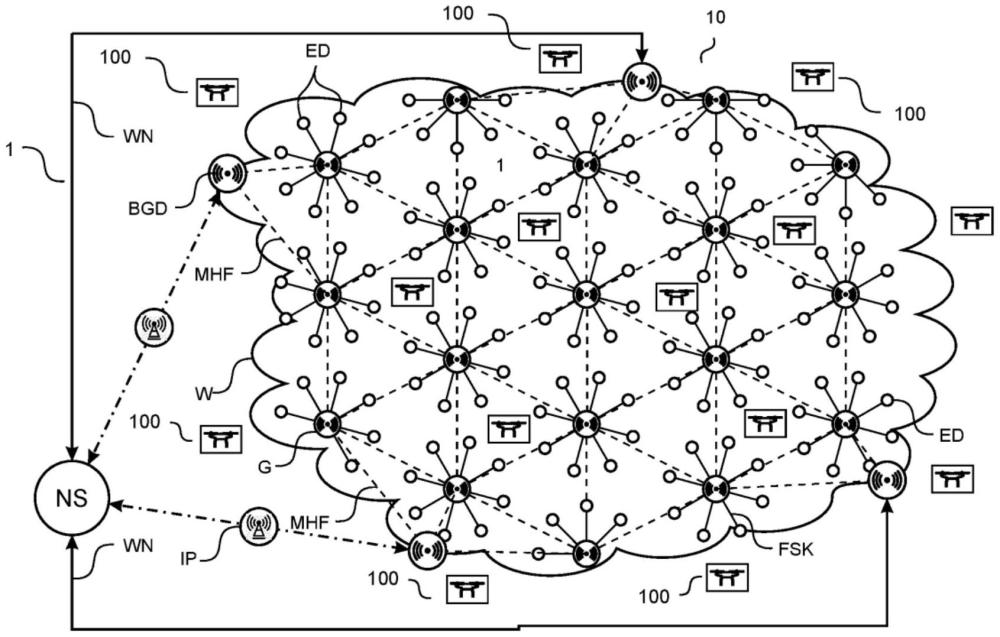
243、图5展示森林火灾检测装置
244、图1中展示根据本发明的布置在要监测的森林w中的森林火灾检测系统1的实施方案。lorawan网状网关网络1具有使用lorawan网络的技术的网状网关网络1。lorawan网络1具有星形架构,其中借助于网关在森林火灾检测传感器ed与中央互联网网络服务器ns之间交换消息包。第一森林火灾检测传感器是终端的一部分并且布置在所述终端中。因此,在本文件中,终端ed和第一森林火灾检测传感器同义地使用相同附图标记。
245、lorawan网状网关网络1具有经由单跳连接fsk连接到网关g的多个第一森林火灾检测传感器ed。网关g通常是网状网关mgd。网状网关mgd连接到彼此并且部分地连接到边界网关bgd。边界网关bgd经由有线连接wn或经由使用互联网协议ip的无线连接来连接到互联网网络服务器ns。
246、多个森林火灾检测装置100布置在森林w中和周围。每一森林火灾检测装置100具有森林火灾检测站200和移动森林火灾检测单元300(参见图4)。
247、对于森林火灾的自主检测,由固定第一森林火灾检测传感器ed中的一个或多个来实行对森林火灾的第一检测。森林火灾检测传感器ed具有用于气体分析、用于记录气体的温度以及用于记录当前风向和风速的传感器阵列。替代地或另外,传感器阵列还可以记录或接收来自外部测量装置的有关主导风向的信号。
248、在下一步骤中,借助于初步定位对森林火灾进行定位。利用检测到森林火灾的第一森林火灾检测传感器ed来实行第一定位,也就是说,检测到森林火灾的森林火灾检测传感器ed的位置标记了森林火灾的位置。另外,借助于多个第一森林火灾检测传感器ed来实行第一定位:多个ed终端各自检测信号,所述信号的源是森林火灾所产生的气体,以及三个个别信号的个别检测时间。基于这三个所检测信号以及其所记录检测时间来确定森林火灾的位置。另外,在对森林火灾的初步定位中还包括可以使用第一森林火灾检测传感器ed来检测的风速和风向。
249、为了执行第一定位,必须尽可能精确地了解每一第一森林火灾检测传感器ed的位置。例如,可以在安装第一森林火灾检测传感器ed的同时进行位置确定。第一森林火灾检测传感器ed可以例如布置在要监测的森林中的树上,并且第一森林火灾检测传感器ed的位置可以使用导航卫星系统(诸如gps(全球定位系统))来确定一次并被存储。为此目的,可以使用可商购获得的gps系统或智能手机。
250、还可以使用合适接收器来确定第一森林火灾检测传感器ed的位置。在使用gps导航卫星系统的情形中,第一森林火灾检测传感器ed接收来自至少四个、通常六个源的信号以用于定位l1频率(1575.42mhz)上的无线电信号。源是不断地广播其当前位置和确切时间的卫星。第一森林火灾检测传感器ed的所确定位置存储在网络服务器ns上,并且可选地另外存储在也永久存储在以此方式确定其位置的第一森林火灾检测传感器ed的控制单元中。替代地或另外,可以使用导航卫星系统连续地或间歇地确定和存储第一森林火灾检测传感器ed的位置确定。然后定期检查并更新第一森林火灾检测传感器ed的位置。网络服务器ns具有在存储器上呈软件程序形式的第一控制件,可以借助于所述控制件来确定火源的位置。
251、基于借助于第一森林火灾检测传感器ed对森林火灾的第一定位,第二森林火灾检测传感器330位于火源附近,使得第二森林火灾检测传感器330到火源的距离小于在森林火灾的第一检测时第一森林火灾检测传感器ed的距离。为此目的,第二森林火灾检测传感器330布置在移动且能够自主控制飞行的森林火灾检测单元300中(参见图3)。森林火灾检测单元300作为森林火灾检测装置100(参见图4、5)的一部分布置在森林火灾检测站200中。
252、在将第二森林火灾检测传感器330定位在森林火灾附近之前、期间和之后,使用第二森林火灾检测传感器330来执行第二检测。对于第二检测,所使用的方法与第一检测不同:第一检测使用第一森林火灾检测传感器ed来实行气体分析并记录气体的温度,而第二检测使用了优选地用于捕获火源的热图像的图像捕获方法。
253、借助于第二森林火灾检测传感器330来实行对火源的第二定位。为此目的,使用了第二森林火灾检测传感器330所记录的所测量值,特别是火源的热图像。森林火灾检测单元300具有定位系统(参见图3),利用所述定位系统来确定火源相对于森林火灾检测单元300的定位系统的位置。另外,借助于导航卫星系统(例如gps)来确定并不断更新森林火灾检测单元300的定位系统的位置。替代地或另外,使用了三角测量方法,其中确定了到森林火灾检测系统1的固定元件(例如第一森林火灾检测传感器ed和/或网关g、mgd、bgd)的距离。
254、有利的是,对火源的此第二定位比借助于第一森林火灾检测传感器ed对火源的第一定位更准确。因此,火源被更精确地定位并且可以被更有针对性地扑灭。除了对火源的第二定位之外,森林火灾检测单元300还经由森林火灾检测单元300与互联网网络服务器ns之间的直接连接和/或经由森林火灾检测单元300与一个或多个网关g、mgd、bgd之间的连接将关于例如火源的范围的额外信息传输到网络服务器ns。森林火灾检测单元300具有第二控制单元和通信单元。
255、对第二森林火灾检测传感器330的定位、对火源的第二检测和第二定位通常在一段时间内进行数次。因此,火灾的位置、范围、方向和蔓延速度都会被不断记录和更新。
256、在第二定位之后,使用森林火灾检测单元300对森林火灾进行检测和/或灭火。森林火灾检测单元300具有灭火单元310(参见图3)。灭火单元310具有喷射的灭火剂,例如水或泡沫灭火剂。取决于火灾的范围及其蔓延方向和速度,喷射可能会发生数次。特定来说,灭火剂310可以施加在不同方向上以便遏制火源或有效地使其灭火。
257、也可以取决于火源的范围以及蔓延方向和速度,借助于多个森林火灾检测单元300来同时且并行地实行对第二森林火灾检测传感器330的定位、对火源的第二检测和第二次定位以及对森林火灾的检测和/或灭火。
258、图2中展示根据本发明的森林火灾检测系统10的详细视图。森林火灾检测系统10具有多个第一森林火灾检测传感器ed,其中相应的八个第一森林火灾检测传感器ed经由单跳连接fsk与网关g通信。网关fgd连接到彼此并且连接到边界网关bgd。边界网关bgd经由有线连接wn或经由使用互联网协议ip的无线连接来连接到互联网网络服务器ns。多个森林火灾检测装置100布置在要监测的森林w周围。
259、图3展示根据本发明的森林火灾检测单元300的示范性实施方案。森林火灾检测单元300被设计为能够自主飞行的无人驾驶飞行器,并且为此目的具有带有由马达321驱动的多个转子322的驱动单元320。马达321通常是电马达,并且由可充电储能装置(电池)供电。通过使转子322枢转和使个别马达321的速度变化来控制森林火灾检测单元300。
260、对于对火源的第二定位,森林火灾检测单元300具有第二森林火灾检测传感器330,在本示范性实施方案中,所述传感器是红外线摄像机。另外,在本示范性实施方案中,森林火灾检测单元300具有被设计为气体传感器的另一森林火灾检测传感器340。
261、为了检测火的源,森林火灾检测单元300具有灭火单元310,所述灭火单元具有用于容纳灭火剂313的灭火剂容纳器311。借助于灭火剂喷射装置312,可以喷射灭火剂313以对火源进行检测和灭火。
262、根据本发明的森林火灾检测单元300还具有检测森林火灾检测单元300附近的物体的导航传感器350。导航传感器350具有一个或多个摄像机和/或在森林火灾检测单元300的飞行期间检测障碍物的基于飞行时间的传感器(诸如雷达、超声波和/或lidar)。通过布置在森林火灾检测单元300中的控制单元对障碍物进行检测、辨识和分析,使得森林火灾检测单元300在其飞行期间自动避开障碍物。
263、以上所有部件均连接到森林火灾检测单元300的第二控制单元,并且由第二控制单元来控制。
264、图4和图5中展示森林火灾检测装置100的示范性实施方案。森林火灾检测装置100具有主要部件森林火灾检测站200和森林火灾检测单元300(参见图3)。
265、森林火灾检测站200被设计为容纳森林火灾检测单元300,并且具有可在顶部处敞开或闭合的全方位风雨防护装置210。顶部侧具有在本实施方案中是光伏系统的能量转换装置220。储能装置(电池)230布置在底侧上,所述储能装置通过能量转换装置220来充入电能。
266、森林火灾检测站200具有用于接纳森林火灾检测单元300的容纳器250,森林火灾检测单元300经由所述容纳器耦合到森林火灾检测站200。容纳器250被设计为连接到森林火灾检测单元300的储能装置,以便对森林火灾检测单元300的储能装置充入电能。
267、灭火剂储存器240布置在森林火灾检测站200的底部处的倾斜平面上。在本实施方案中,灭火剂313是填充到多个一次性容器中的泡沫灭火剂。此类容器由rain industries公司销售。森林火灾检测单元300将一个或多个容器投放火源上,由于所产生的热量,容器的塑料壁破裂,并且施加了灭火剂313。另一可能性是使用装满水的容器。替代地,森林火灾检测单元300可以具有借助于声压所引起的气压波动来扑灭火灾的声学炮作为灭火剂313。频率为30hz到60hz的声波会在火灾周围的区域中触发机械振动,这会影响燃烧材料和氧气供应两者。使用声波炮来灭火特别具有可持续性,在灭火期间不会产生任何废弃物,不需要对森林土壤造成问题的水或化学品,并且只要森林火灾检测器单元300的储能装置具有能量就可以实行。
268、为了检测森林火灾,在固定第一森林火灾检测传感器ed(参见图1)对火源进行第一检测和定位之后,第二森林火灾检测传感器330和因此森林火灾检测单元300移动到火源,目的是进行第二检测、第二定位和森林火灾检测。有鉴于此,在网络服务器ns上确定路线。路线包括作为森林火灾检测站200的一部分的森林火灾检测单元300的当前位置以及目标区域的位置,特别是火源的位置。森林火灾检测装置100具有连接到网络服务器ns并接收和发送关于火源的范围和位置数据的信息的通信单元。然后,森林火灾检测单元300从森林火灾检测站200解耦,并且森林火灾检测单元300的马达321被启动。在同一时间,森林火灾检测站200的风雨防护装置210被打开(图5)。
269、然后,森林火灾检测单元300以机动方式沿着所计算路线移动到火源的目标区域。森林火灾检测单元300借助于导航传感器350持续检测可能出现的障碍物,当出现障碍物时使用第二控制件来确定前往目标区域的替代路线,并继续沿着替代路线机动移动到目标区域,其中在森林火灾检测单元300的移动期间持续重复和实行对障碍物的检测、替代路线的确定和沿着替代路线的机动移动。
270、在目标区域中,借助于森林火灾检测单元300通过喷射灭火剂313对火源进行第二检测和第二定位以及对火源进行检测或灭火。森林火灾检测单元300的第二控制件生成或/或执行用于对火源的第二检测、用于对火源的第二定位、用于移动森林火灾检测单元300、用于使森林火灾检测单元300导航、用于使森林火灾检测单元300转向和/或用于喷射灭火剂313的控制命令。
271、森林火灾检测单元300的第二控制件具有存储器,第二控制件在所述存储器中存储可执行程序,所述程序使得自主森林火灾检测单元能够自主操作。有利的是,借助于根据本发明的用于检测和/或定位森林火灾的方法可以完全或至少部分地自主实行对火源的第二检测、对火源的第二定位和灭火剂313的喷射。
272、在检测到火源之后,特别是在定位并喷射灭火剂313之后,森林火灾检测单元300返回到森林火灾检测站200并耦合到容纳器250,使得森林火灾检测单元300连接到森林火灾检测站200的能量供应器(储能装置230)。此后,向森林火灾检测器单元300提供能量。另外,森林火灾检测器单元300连接到灭火剂储存器240。森林火灾检测单元300还装载有灭火剂313。另外,关闭风雨防护装置210(图4),森林火灾检测站200准备好供再次使用。
273、另外,森林火灾检测站200还具有控制单元,所述控制单元控制能量转换装置220从灭火剂储存器240向森林火灾检测单元300提供灭火剂313和森林火灾检测单元300的起飞或着陆以及风雨防护装置210的打开和关闭。
274、附图标记列表
275、1 森林火灾检测系统
276、10 lorawan网状网关网络
277、ed 终端/第一森林火灾检测传感器
278、g 网关
279、ns 互联网网络服务器
280、ip 互联网协议
281、mhf 多跳无线网络
282、mdg 网状网关
283、bgd 边界网关
284、fsk fsk调制
285、wn 有线连接
286、w 森林
287、100 森林火灾检测装置
288、200 森林火灾检测站
289、210 风雨防护装置
290、220 能量转换单元
291、230 储能装置
292、240 灭火剂储存器
293、250 森林火灾检测单元容纳器
294、300 森林火灾检测单位
295、310 灭火单元
296、311 灭火剂容纳器
297、312 灭火剂喷射装置
298、313 灭火剂
299、320 飞行推进/驱动装置
300、321 马达
301、322 转子
302、330 第二森林火灾检测传感器/ir摄像机
303、340 森林火灾检测传感器
304、350 导航传感器
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!