一种改进的自适应交通流组合预测方法
本发明属于智能交通预测领域,具体的说,是一种基于kl散度和变分能量熵原理改进变分模态分解算法、图注意力网络和改进adam优化算法双向门口循环单元网络的短时交通流组合模型智能预测方法。
背景技术:
1、随着城市化建设的不断推进,汽车人均保有量在逐渐上升,这对城市交通规划问题提出了新的考验。其中,交通拥堵已成为发达国家和发展中国家许多大城市的普遍问题,这可能导致道路容量降低,车辆速度降低,空气污染加剧。随着科技的进步,为了解决以上问题,智能交通系统(its)得以提出并且迅速发展。交通流量预测是指利用历史交通状态(流量、速度等)来预测未来的交通状态。交通传感器可以记录历史交通状态。通过对历史和当前交通数据的分析,可以获得预测结果。做到准确、及时的交通流量预测,是实现智能交通系统管控的基础之一。
2、目前对于交通流量的预测方法主要分为三类:分别是基于数理统计的方法,基于智能算法理论的机器学习方法和基于大数据的深度学习方法。传统的数理统计分析方法主要有:历史平均法、差分整合移动平均自回归模型等,这类统计学方法模型原理简单,预测速度也比较快,但是它们大多是基于一定的线性假设,即假设预测变量和结果变量之间的关系是线性的,同时要求数据必须是稳定的,对交通流的强非线性特征表征能力不足,因此其预测精度差;基于机器学习领域的主要方法有:k近邻算法、支持向量回归等,机器学习算法主要用于结构化数据中,可以在一定程度上改善交通流量非线性非平稳特性,但是该方法需要花费大量的时间进行特征的选择和构造,常用于解决分类和回归问题。并且一般的机器学习算法对时间特性提取不充分,也无法交通流的路网空间特征建模;基于大数据的深度学习方法可以充分地提取交通流量的时空相关性。但是交通流随机波动性强、数据中含噪声多会导致预测精度下降,并未考虑交通流量的短时非平稳性对预测精度的影响
3、基于以上分析,交通流量具有非线性非平稳性、空间相关性和时间依赖性等特点,对于大部分交通流量,它们的时空关系复杂度较高,给预测增加了一定难度。
技术实现思路
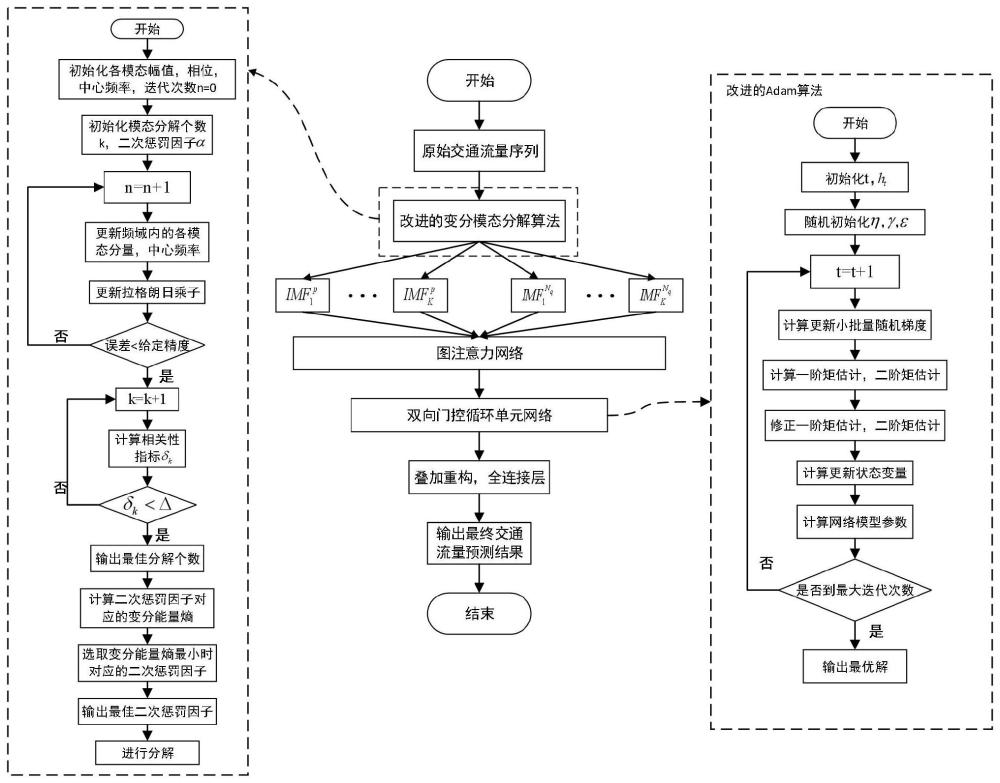
1、本发明是为了解决上述三类交通流量预测方法的不足,提出一种改进的自适应交通流组合预测方法,以期能考虑同时结合交通流量时间序列的短时非平稳性、空间相关性和时间依赖性三方面的特点,从而提升智能交通的预测准确度和预测效率。
2、为解决上述技术问题,本发明采用以下技术方案:
3、本发明一种改进的自适应交通流组合预测方法的特点,包括如下步骤:
4、步骤1:基于kl散度和变分能量熵分解处理原始交通流量序列y:
5、步骤1.1:利用式(1)计算原始交通流量序列y和各模态分解余量之间的相关性:
6、
7、式(1)中,h(y)表示原始交通流量序列y的熵,dkl(yk|y)表示原始交通流量序列y与第k个模态分解余量yk之间的kl散度值;ek(y,yk)代表原始交通流量序列y和第k个模态分解余量yk间的相关性;k=1,2,...k,k为原始交通流量序列y的模态分解个数;
8、步骤1.2:采用式(2)对原始交通流量序列y和第k个模态分解余量yk的相关性ek(y,yk)进行归一化处理,得到归一化后的第k个相关性指标δk:
9、
10、步骤1.3:利用式(3)计算第k个模态分解余量yk的变分能量熵值vk:
11、vk=-pk lnpk (3)
12、式(3)中,pk表示第k个模态分解余量yk的能量熵占总能量熵的比重;并有:
13、
14、式(4)中,gk表示第k个模态分解余量yk的能量熵,并由式(5)得到;g表示总能量熵值,且
15、
16、式(5)中,uk表示第k个模态分解余量yk的交通流量;
17、步骤1.4:利用式(5)构建增广拉格朗日目标函数l(uk,ωk,λ):
18、
19、式(5)中:uk(t)表示原始交通流量序列y在时域t下的第k个模态分量,且其中,ak(t)表示第k个模态分量uk(t)在时域t下的幅值,φk(t)表示第k个模态分量uk(t)在时域t下的瞬时相位;ωk(t)表示第k个模态分量uk(t)在时域t下的瞬时频率,且ωk(t)=φk′(t);φk′(t)表示φk(t)的导数;λ(t)表示时域t下的拉格朗日乘子;α表示二次惩罚项;表示对时域t的偏微分;δ(t)表示时域t下的单位冲激函数;j表示虚数;ωk表示时域t下的第k个模态分量uk(t)变换到频域ω下的中心频率;*表示卷积运算符;f(t)表示时域t下的原始交通流量序列y;
20、步骤1.5:对增广拉格朗日目标函数l(uk,ωk,λ)进行求解,得到最佳模态分解个数kbest;
21、步骤1.6:在[αmin,αmax]范围内选取不同的二次惩罚因子,并在不同的二次惩罚因子下利用步骤1.3计算所对应的总变分能量熵值,并将总变分能量熵值最小时所对应的二次惩罚因子记为αbest;
22、步骤1.7:根据kbest和αbest,对原始交通流量y进行变分模态分解,得到kbest个模态分量序列其中,表示第k*个模态分量;
23、步骤2:基于图注意力网络的捕捉交通流量空间相关性:
24、步骤2.1:在交通路网中选取中心节点记为p点,按照步骤1对p点的交通流量序列yp进行分解,得到包含kbest个模态分量序列的交通流量序列其中,分别表示yp的第k*个模态分量;
25、步骤2.2:选取m个p点的领域节点,得到一阶邻域节点集合n={n1,n2,…,nq,...,nm},其中,nq表示p点的第q个一阶邻域节点;
26、按照步骤1对nq的交的交通流量序列进行分解,得到包含kbest个模态分量序列的交通流量序列其中,表示第q个一阶邻域节点nq的第k*个模态分量;
27、步骤2.3:利用式(11)计算中心节点p的交通流量时间序列xp对第q个一阶邻域节点nq的交通流量时间序列的注意力系数从而得到注意力系数向量
28、
29、式(11)中,exp表示自然底数;表示待学习的权重向量;w表示待学习的权重矩阵;||表示拼接操作;σ(·)表示leakyrelu激活函数;
30、步骤2.4:利用式(11)计算中心节点p的交通流量时间序列xp的自注意力系数αpp,从而利用式(12)得到p点的加权交通流量时间序列
31、
32、步骤2.5:利用式(13)得到第q个一阶邻域节点nq的加权交通流量时间序列
33、
34、步骤3:基于改进adam优化算法的双向门控循环单元网络进行预测:
35、步骤3.1:将xp和作为双向门控循环单元网络的输入,并利用改进后的adam优化算法对双向门控循环单元网络进行优化求解,得到各个最佳参数值;
36、步骤3.2:将和输入到最优双向门控循环单元网络中,从而得到p点的预测模态分量序列和邻域节点nq的预测模态分量序列其中,分别表示p点的第k*个加权交通流量分量序列的预测值;表示第q个一阶邻域节点nq的第k*个加权交通流量分量序列的预测值;
37、步骤3.3:将利用式(20)得到p点的原始交通流量序列的最终预测结果hp:
38、
39、本发明所述的一种改进的自适应交通流组合预测方法的特点也在于,所述步骤1.5包括:
40、步骤a:定义n为搜索迭代次数,并初始化为n=0;
41、步骤b:定义原始交通流量序列y在时域t下第n次迭代的第k个模态分量为
42、定义时域t下第n次迭代的第k个瞬时频率为
43、定义第n次迭代的时域t下拉格朗日乘子为λn(t);
44、步骤c:利用式(6)分别得到原始交通流量序列y在频域ω下第n+1次迭代的第k个模态分量和中心频率
45、
46、式(6)中,和分别表示在时域t下的f(t)和λn(t)通过傅里叶变换到频域ω下的结果,表示在时域t下的第n次迭代的第i个模态分量;表示在频域ω下的第k个模态分量在第n次迭代的中心频率;
47、步骤d:利用式(7)计算第n+1次迭代的拉格朗日乘子
48、
49、式(7)中,τ为噪声容限;
50、步骤e:若式(8)成立,则执行步骤f;否则,将n+1赋值给n,返回步骤c;
51、
52、式(8)中,ε为给定精度;
53、步骤f:初始化原始交通流量序列y的模态分解个数k=1,判断δk<δ是否成立,若成立,则表示当前模态分解个数k为最佳模态分解个数kbest,否则,将k+1赋值给k,返回步骤c。
54、所述步骤3.1包括:
55、步骤3.1.1:定义当前迭代次数为t,初始化t=0,设置最大迭代次数为tmax;
56、步骤3.1.2:定义并初始化学习率超参数为η、历史迭代权重超参数为γ,第t次迭代更新变量为ht,并初始化ht=0,实常数为ε,且ε∈(0,1);
57、定义第t次迭代的一阶矩估计为mt,并初始化mt=0,第t次迭代的二阶矩估计为vt,并初始化vt=0;
58、定义并随机初始化一阶矩估计的指数衰减速率为β1、二阶矩估计的指数衰减速率为β2;
59、步骤3.1.3:定义第t次迭代的损失函数为f(θt);其中,θt表示在第t次迭代时的交通流量自变量;
60、步骤3.1.4:利用式(15)更新第t+1次迭代的小批量随机梯度gt+1:
61、
62、式(15)中,表示使用第t次迭代的交通流量自变量θt计算的损失函数f(θt)的随机梯度;
63、步骤3.1.5:利用式(16)计算第t+1次迭代的一阶矩估计mt+1、二阶矩估计vt+1:
64、
65、步骤3.1.6:利用式(17)得到第t+1次迭代的修正后一阶矩估计二阶矩估计
66、
67、步骤3.1.7:利用式(18)计算第t+1次迭代的更新变量ht+1:
68、
69、步骤3.1.8:利用式(19)计算更新第t+1次迭代的网络模型参数θt+1:
70、θt+1=θt-ht+1 (19)
71、步骤3.1.9:将t+1赋值给t,t>tmax是否成立,若成立,则表示得到最优双向门控循环单元网络,并执行步骤3.2;否则,返回执行步骤3.1.4顺序执行。
72、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述自适应交通流组合预测方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
73、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述自适应交通流组合预测方法的步骤。
74、本发明基于交通流量时间序列的复杂非线性、非平稳性以及时间依赖性三个方面的特点,与传统仅考虑其中一个或两个方面特点的预测方法相比,具备更好的交通流量预测精度以及速度,具体地说,本发明具有以下技术效果:
75、1、本发明采用相对熵与变分能量熵确定变分模态分解算法的超参数,并将交通流量序列分解为一系列相对平稳的高低频分量序列,通过对原始时间序列的分解及降噪,降低其一般情况下具有的短时非平稳性,有利于后续减少其他因素对于交通流量预测的干扰,降低其非线性及非平稳性;
76、2、本发明将选取的交通节点的各交通流量分量序列作为图注意力网络的特征输入,利用图注意力网络的注意力机制对各分量序列进行注意力系数加权,以捕捉中心预测节点交通流量对其邻近节点交通流量的不同注意力程度,将空间特性考虑在内,从而提高了预测的准确性;
77、3、本发明将所选的各交通节点加权后的各交通流量分量序列输入双向门控循环单元网络,实现对其时间依赖性的考虑,并通过梯度预处理、偏差修正方法改进adam算法,并利用改进后的自适应adam算法对双向门控循环单元网络进行迭代,提高了模型的预测精度以及速度,从而更加快速,准确地进行交通流量预测,提升了工作效率。
- 还没有人留言评论。精彩留言会获得点赞!