一种面向慢行交通系统的车辆速度检测方法及装置与流程
本发明属于计算机,具体涉及一种面向慢行交通系统的车辆速度检测方法及装置。
背景技术:
1、自行车和电动车交通作为零碳且健康的一种交通方式,在城市交通系统中可以发挥更大的作用,通过不断提升出行品质,转变出行结构。因此,基于慢行交通系统,通过检测自行车和电动车车辆的行驶速度,可以完善城市慢行交通网络,确保城市交通系统的安全与畅通。
2、传统的车辆速度检测方法主要包括环形线圈车辆传感器、区间测速、雷达微波测速、激光检测等多种方式,但是这些传统方式通常难以识别车辆的类别属性,如车辆类型,同时,安装、维护和操作这些设备通常需要昂贵的投资和成本,且容易受到天气、多路径干扰和其他外部因素的影响,从而导致速度测量准确性降低。比如采用地感线圈测速法测速时,需要在道路中埋设地感线圈来实现,安装和维护这些设备的费用比较昂贵,并且地感线圈也非常容易受到天气的影响,从而导致测速数据不准确。
3、因此,有必要提供一种成本低,测速稳定且准确性高的车辆速度检测方法。
技术实现思路
1、为了解决背景技术中的至少一个技术问题,本发明提出了一种面向慢行交通系统的车辆速度检测方法及装置,用以在慢行交通系统中降低检测成本,提高测速稳定性和准确性。
2、根据本发明的第一个方面,本发明首先提供一种面向慢行交通系统的车辆速度检测方法,包括:
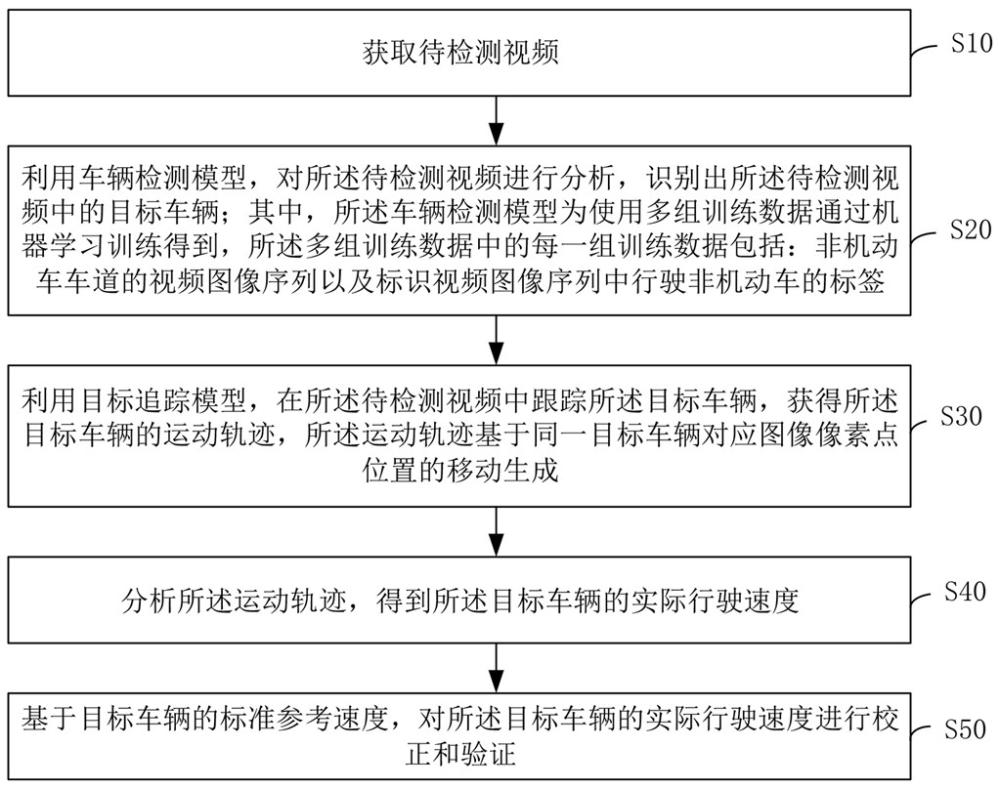
3、获取待检测视频;
4、利用车辆检测模型,对所述待检测视频进行分析,识别出所述待检测视频中的目标车辆;其中,所述车辆检测模型为使用多组训练数据通过机器学习训练得到,所述多组训练数据中的每一组训练数据包括:非机动车车道的视频图像序列以及标识视频图像序列中非机动车辆的标签;
5、利用目标追踪模型,在所述待检测视频中跟踪所述目标车辆,获得所述目标车辆的运动轨迹,所述运动轨迹基于同一目标车辆对应图像像素点位置的移动生成;
6、分析所述运动轨迹,得到所述目标车辆的实际行驶速度。
7、进一步地,所述车辆检测模型使用多组训练数据通过机器学习训练的过程,包括:
8、获取初始检测模型,所述初始检测模型包括yolo模型;
9、采集目标路段在不同时段和环境下的多组非机动车道视频数据;
10、对所述非机动车道视频数据进行预处理,得到视频图像序列,并制成视频数据集;
11、根据预设划分类别对所述视频数据集内图片进行标注,每张图片生成对应的标签,所述标签包括类别信息和位置信息;所述预设划分类别包括人骑自行车和人骑电动车两大类别;
12、利用标注后的视频数据集对所述初始检测模型进行训练,直至获得满足预设条件的车辆检测模型。
13、进一步地,所述利用标注后的视频数据集对所述初始检测模型进行训练,直至获得满足预设条件的车辆检测模型,包括:
14、将标注后的视频数据集输入所述初始检测模型,根据预设参数对所述初始检测模型进行训练,直至得到训练轮次内检测精度最高的权重文件,导出训练后的车辆检测模型;
15、其中,所述预设参数包括训练的批量大小和训练轮次。
16、进一步地,所述利用车辆检测模型,对所述待检测视频进行分析之前,包括:
17、确定出所述待检测视频中的非机动车道区域;
18、所述利用车辆检测模型,对所述待检测视频进行分析,识别出所述待检测视频中的目标车辆,包括:
19、利用车辆检测模型,对所述非机动车道区域中的行驶车辆进行类型检测,识别出目标车辆。
20、进一步地,所述利用车辆检测模型,对所述待检测视频进行分析,识别出所述待检测视频中的目标车辆,包括:
21、将所述待检测视频输入所述车辆检测模型;
22、所述车辆检测模型识别出所述待检测视频中的目标车辆,并通过边界框进行标识;其中,所述目标车辆包括行驶中的非机动车辆;
23、获取所述目标车辆的特征信息并保存于一检测列表,所述检测列表包括所述目标车辆的特征信息与所述目标车辆的跟踪id的映射关系;其中,所述特征信息包括像素点位置、宽度和高度信息、置信度阈值以及所属类别。
24、进一步地,所述利用目标追踪模型,在所述待检测视频中跟踪所述目标车辆,获得所述目标车辆的运动轨迹,包括:
25、基于所述跟踪id,在所述检测列表中分别获取标识同一目标车辆的边界框的图像像素点;
26、按序依次连接多个所述图像像素点,生成所述目标车辆的运动轨迹。
27、进一步地,所述分析所述运动轨迹,得到所述目标车辆的实际行驶速度,包括:
28、基于所述运动轨迹中两个不同图像像素点的位置关系,计算出目标车辆的像素距离;
29、基于图像像素点距离到实际距离的映射关系,计算出所述目标车辆的实际运动距离,其中,所述映射关系为:
30、s = d * pixel_distance;
31、其中,所述s表示实际运动距离,d表示像素距离,pixel_distance表示每个图像像素点代表的实际距离;
32、基于所述两个不同图像像素点对应两个视频帧的帧序号以及视频图像帧率,获取所述目标车辆的运动时间;
33、基于所述实际运动距离与运动时间的关系,得到所述目标车辆的实际行驶速度。
34、进一步地,所述每个图像像素点代表的实际距离pixel_distance满足以下公式:
35、pixel_distance1 = a / bicycle_width;或,
36、pixel_distance2 = b / electric_width;
37、其中,所述pixel_distance1表示目标车辆为人骑自行车时每个像素点代表的实际距离,a为常数,表示普通自行车的实际平均宽度,bicycle_width表示自行车实际宽度;pixel_distance2表示目标车辆为人骑电动车时每个像素点代表的实际距离,b为常数,表示普通电动车的实际平均宽度,electric_width表示电动车实际宽度。
38、进一步地,所述车辆速度检测方法包括:
39、基于目标车辆的标准参考速度,对所述目标车辆的实际行驶速度进行校正和验证。
40、根据本发明的第二个方面,本发明还提供了一种面向慢行交通系统的车辆速度检测装置,包括:
41、数据获取模块,用于获取待检测视频;
42、目标检测模块,用于利用车辆检测模型,对所述待检测视频进行分析,识别出所述待检测视频中的目标车辆;其中,所述车辆检测模型为使用多组训练数据通过机器学习训练得到,所述多组训练数据中的每一组训练数据包括:非机动车车道的视频图像序列以及标识视频图像序列中行驶非机动车的标签;
43、目标追踪模块,用于利用目标追踪模型,在所述待检测视频中跟踪所述目标车辆,获得所述目标车辆的运动轨迹,所述运动轨迹基于同一目标车辆对应图像像素点位置的移动生成;
44、数据处理模块,用于分析所述运动轨迹,得到所述目标车辆的实际行驶速度。
45、通过本发明技术方案,可以获得如下技术效果:
46、本发明提供的车辆速度检测方法及装置,采用计算机视觉和图像处理技术,主要对视频帧中行驶的自行车和电动车进行检测和跟踪,以识别和跟踪车辆的具体位置和轨迹,通过分析人骑自行车和/或人骑电动车目标车辆在检测视频中的位置随时间的变化,从而计算目标车辆的实际行驶速度。
47、相比于传统测速方法,本发明提供的车速检测方法基于视频测速,监控范围大、检测信息丰富;测速仅依赖于外部硬件设备摄像机,设备简单且成本低,进一步操作简单,降低检测的繁琐度;另外,通过这种检测方法,可以提供准确、实时、稳定可靠的慢行交通车辆速度检测数据,进一步能够帮助交通管理部门及时了解慢行交通道路上的非机动车车速情况,提高慢行交通的可靠性和便捷性。
- 还没有人留言评论。精彩留言会获得点赞!